

2.5. Кулачковый механизм с качающимся толкателем, снабженным роликом (рис.14).
В этом механизме, помимо профиля кулачка и диаметра ролика, известными являются расстояние между осями вращения кулачка и толкателя ОО′ и длина толкателя О′А.
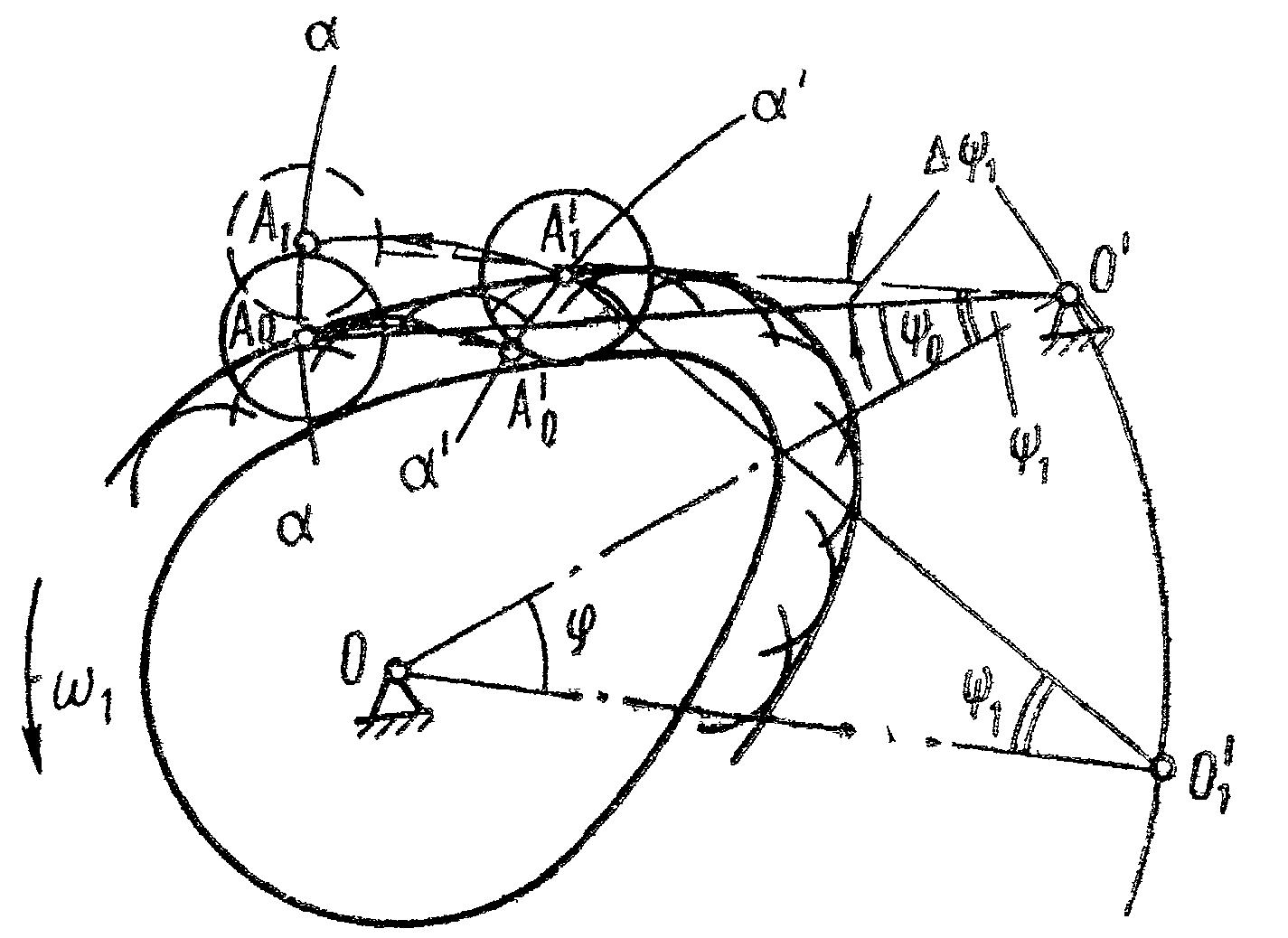
Рис. 14
Центр ролика (точка А) в абсолютном движении перемещается по дуге окружности αα радиусом 0′А с центром в точке О′. Относительно кулачка центр ролика перемещается по центровому профилю.
Для определения положения и перемещения толкателя при повороте кулачка на заданный угол φ применим метод обращения движения, т. е. кулачок будем считать неподвижным, а толкатель О'А вместе со стойкой (положение стойки определяется положением линии центров ОО′) повернем на угол φ относительно оси вращения кулачка О в направлении, противоположном направлению его вращения. При таком повороте ось вращения толкателя будет перемещаться по дуге окружности радиусом ОО' с центром в точке О, и линия центров займет новое положение ОО′1, которое составит с действительным положением линии центров О' угол φ. Далее из точки О′1, которая является искомым относительным положением оси вращения толкателя, радиусом, равным длине толкателя О'А, делаем засечку на центровом профиле. Полученная точка А′1 есть искомое относительное положение центра ролика. Соединяя точку А′1 с точкой О′1, получим искомое относительное положение толкателя. Перемещение (угол поворота) толкателя из одного положения в другое определяется разностью углов ψ1 и ψ0 между толкателем и линией центров в соответствующих положениях:
![]()
Действительное искомое положение центра ролика А1 легко определить, если радиусом 0А′1 сделать засечку на действительной траектории его движения — дуге αα (точка А1). Соединяя точки А1 и О' прямой, получим искомое действительное положение толкателя.
Дуга
![]() измеренная
по дуге αα, есть искомое перемещение
точки А,
которое
пропорционально угловому перемещению
толкателя:
измеренная
по дуге αα, есть искомое перемещение
точки А,
которое
пропорционально угловому перемещению
толкателя:
![]()
Это же перемещение можно измерить по дуге α'α' (см. рис. 14), на которую радиусом ОА0 следует перенести начальное положение точки А(А'0):
![]()
2.6. Кулачковый механизм е плоским качающимся толкателем (рис. 15).
В этом кулачковом механизме, помимо профиля кулачка, задано расстояние между осями вращения кулачка и толкателя ОО'.
Для определения положения и перемещения толкателя при повороте кулачка на заданный угол φ воспользуемся методом обращения движения, т, е. кулачок оставляем неподвижным, а толкатель вместе со стойкой поворачиваем на угол φ относительно оси вращения кулачка в направлении, противоположном направлению его вращения. При таком повороте ось вращения толкателя будет перемещаться по дуге окружности радиусом ОО' с центром в точке О, и линия центров займет положение ОО′1, которое составит с действительным положением линии центров ОО' заданный угол φ.
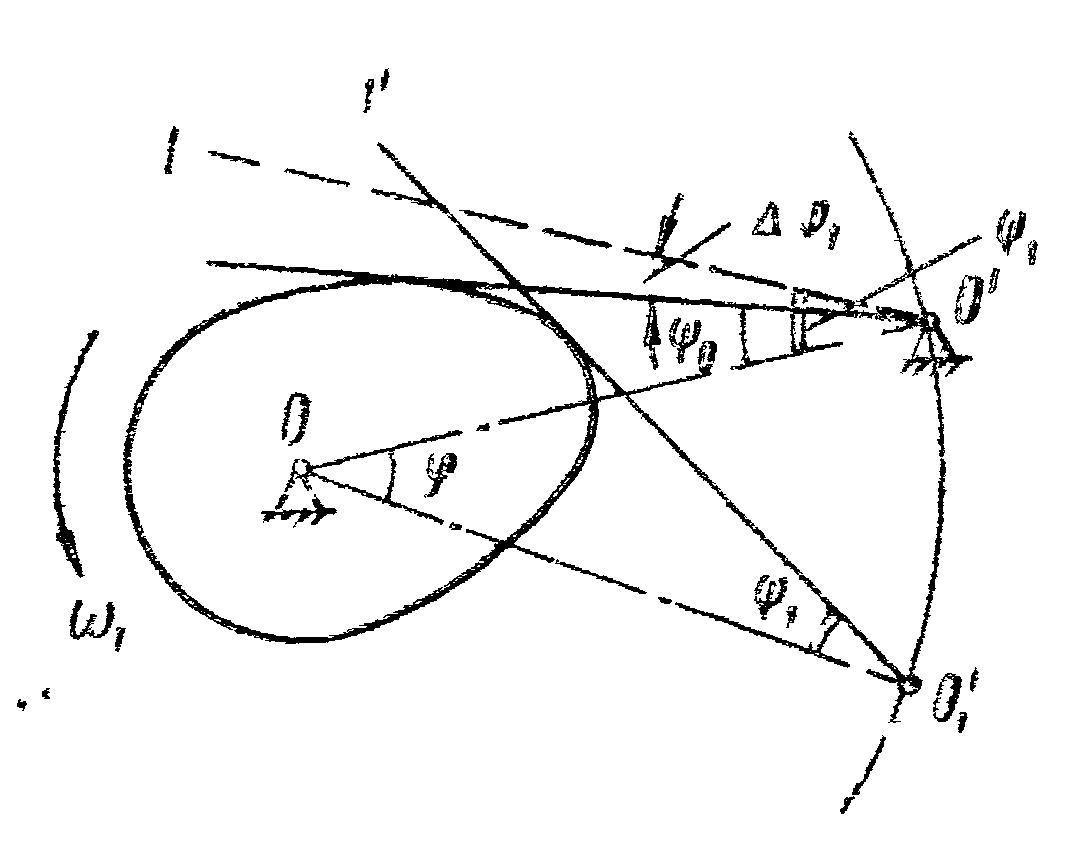
Рис. 15
Далее из точки О′1, которая является искомым относительным положением оси вращения толкателя, проводим касательную к профилю кулачка (прямая О′1 — ′1). Эта касательная есть искомое относительное положение толкателя.
Перемещение (угол поворота) толкателя из одного положения в другое определяется разностью углов ψ1 и ψ0 между толкателем и линией центров в соответствующих положениях:
Для определения действительного искомого положения толкателя достаточно из точки О' провести прямую под углом ψ1 к линии центров ОО' (эта прямая на рисунке показана пунктиром).
Рассмотрим плоский кулачковый механизм с поступательно движущимся роликовым толкателем ( Рис. 11.9). Из BPF
![]()
где
|

Подставляя эти выражения в формулу для тангенса угла давления, получим
|
где знак - соответствует смещению оси толкателя (эксцентриситету) вправо от центра вращения кулачка.
|
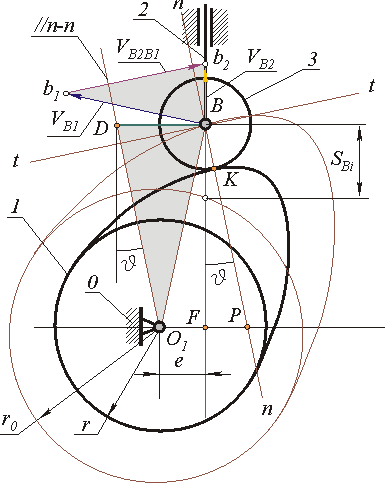
Рис. 11.9 |