

§ 24.4. Обратная связь в реверсивных магнитных усилителях
Обратная связь в реверсивных магнитных усилителях может быть внешней и внутренней.
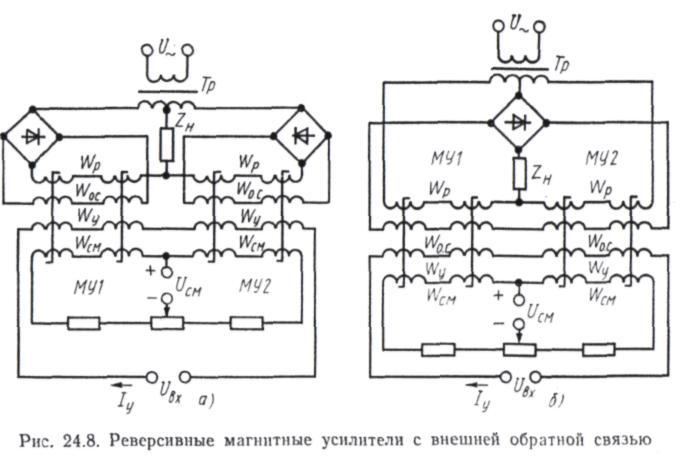
При внешней обратной связи ее обмотки могут быть выполнены раздельно для каждого из однотактных усилителей, входящих в реверсивную схему. Такая схема показана па рис. 24.8, а для дифференциального усилителя с выходным переменным током. Обмотка обратной связи может включаться и последовательно с нагрузкой через выпрямитель (рис. 24.8, б) т. е. быть общей для обоих ВХОДЯЩИХ в схему однотактных усилителей.
Аналогичные
схемы включения обмоток обратной связи
могут быть использованы и для
реверсивных магнитных усилителей с
выходным постоянным током. Теоретически
реверсивные усилители с раздельными
обмотками обратной связи могут работать
без обмоток смещения, поскольку
необходимое начальное смещение
создается за счет прохождения по обмоткам
обратной связи тока холостого хода. На
практике обычно используют небольшую
обмотку смещения, с помощью которой
может быть выбран необходимый режим
для каждого![]() однотактного
усилителя и точно установлен нулевой
выходной сигнал при
однотактного
усилителя и точно установлен нулевой
выходной сигнал при
Следует также отметить, что включение общей обмотки обратной связи для реверсивных магнитных усилителей с выходным постоянным током еще более снижает и без того низкий КПД, однако повышает стабильность нуля.
В
системах автоматики, как уже отмечалось,
усилители обычно используются для
питания исполнительных электродвигателей.
Наибольшей простотой и надежностью
характеризуются двухфазные асинхронные
электродвигатели, скорость которых
регулируется за счет изменения напряжения
на управляющей обмотке. Для управления
такими двигателями и используются
реверсивные магнитные усилители с
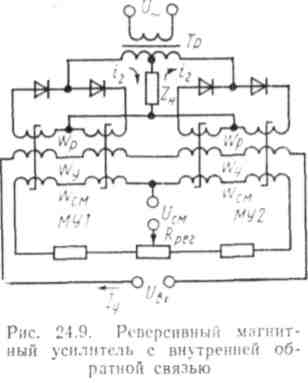
обратными связями. На рис. 24.9 показана
дифференциальная схема реверсивного
магнитного усилителя с внутренней
обратной связью. Для балансировки
схемы (настройки нуля и вида выходной
характеристики) используются обмотки
смещения, питаемые через регулировочный
резистор![]()
Ток
нагрузки в сопротивлении![]() равен
разности токов двух однотактных
усилителей
равен
разности токов двух однотактных
усилителей![]() и
и![]()
![]()
![]() и
и
![]() .
выпрямленных с помощью диодов.
При этом постоянная составляющая
протекает лишь по рабочим обмоткам, а
в нагрузку поступает близкий к
синусоидальному ток
.
выпрямленных с помощью диодов.
При этом постоянная составляющая
протекает лишь по рабочим обмоткам, а
в нагрузку поступает близкий к
синусоидальному ток![]() =
=
![]() При
наличии управляющего тока
При
наличии управляющего тока
![]() определенной
полярности действующее значение
тока
определенной
полярности действующее значение
тока
![]() возрастает,
а
возрастает,
а
![]() —
уменьшается (поскольку в данном
случае подмагничивание сердечников
—
уменьшается (поскольку в данном
случае подмагничивание сердечников
![]() возрастает,
а в
возрастает,
а в
![]() —уменьшается).
При изменений полярности сигнала
управления картина меняется:
—уменьшается).
При изменений полярности сигнала
управления картина меняется:
![]() уменьшается,
а
уменьшается,
а
![]() увеличивается.
Фаза переменного тока в нагрузке при
этом изменяется на 180°.
увеличивается.
Фаза переменного тока в нагрузке при
этом изменяется на 180°.
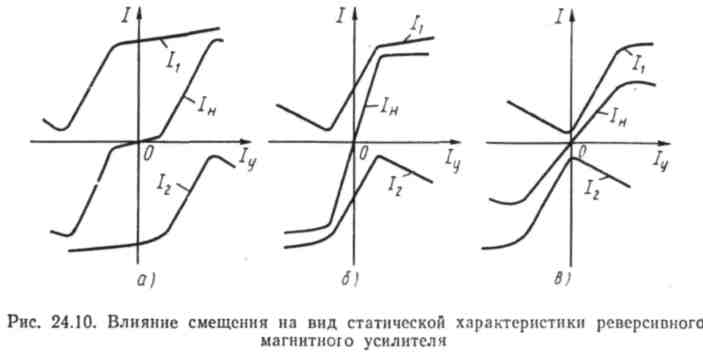
Рассмотрим
влияние смешения на вид статической
характеристики реверсивного магнитного
усилителя. Па рис. 24.10 показано
построение статической характеристики
реверсивного магнитного усилителя при
разных значениях смещения. Построение
выполняется графическим сложением двух
статических характеристик однотактных
магнитных усилителей
![]() и
и
![]() ,
включенных
дифференциально (навстречу друг другу)-
,
включенных
дифференциально (навстречу друг другу)-
Характеристики
на рис. 24.10, а
соответственные
значения токов![]() и
и![]() на
выходе каждого из однотактных усилителей
при
на
выходе каждого из однотактных усилителей
при![]() близки к максимальным значениям, что
вызывает дополнительный нагрев
усилителя. Кроме того, результирующая
характеристика
близки к максимальным значениям, что
вызывает дополнительный нагрев
усилителя. Кроме того, результирующая
характеристика
![]() имеет
очень пологий
начальный участок, т. е. усилитель будет
нечувствительным при малых сигналах
управления. Для устранения этих
недостатков и необходимо применять
смещение (начальное подмагничивание
сердечников). Направление тока смещения
выбирают таким, чтобы уменьшились
значения токов
имеет
очень пологий
начальный участок, т. е. усилитель будет
нечувствительным при малых сигналах
управления. Для устранения этих
недостатков и необходимо применять
смещение (начальное подмагничивание
сердечников). Направление тока смещения
выбирают таким, чтобы уменьшились
значения токов
![]() и
и
![]() при
при
![]() .
Характеристика
.
Характеристика
![]() при
этом смещается вправо, а характеристика
при
этом смещается вправо, а характеристика
![]() —
влево.
—
влево.
Обычно
величину смещения выбирают в зависимости
от назначения усилителя, обеспечивая
его работу в одном из двух режимов: режим
класса А или режим класса В. Если
начальное (при
![]() )
состояние каждого из однотактных
усилителей соответствует точке на
середине линейного (рабочего) участка
его характеристики (рис. 24.10, б),
то
считается, что усилитель работает в
режиме класса А. Следовательно, в
режиме класса А смещение выбирается
таким, чтобы токи
)
состояние каждого из однотактных
усилителей соответствует точке на
середине линейного (рабочего) участка
его характеристики (рис. 24.10, б),
то
считается, что усилитель работает в
режиме класса А. Следовательно, в
режиме класса А смещение выбирается
таким, чтобы токи![]() и
и
![]() при
при![]() были
равны примерно половине своего
максимального
значения. В этом режиме достигается
наибольший коэффициент усиления.
были
равны примерно половине своего
максимального
значения. В этом режиме достигается
наибольший коэффициент усиления.
В
режиме класса В смещение (начальное
подмагничивание) увеличивается таким
образом, чтобы токи![]() и
при
и
при
![]() имели
минимальное
имели
минимальное
![]() значение
значение
(рис. 24.10, в). В этом режиме обеспечиваются минимальные потери (а значит, и высокий КПД) при малых сигналах управлении. При кратковременной работе усилителя режим класса В позволяет уменьшить сечение провода рабочих обмоток.
Можно построить реверсивный магнитный усилитель с внутренней обратной связью и по мостовой схеме, однако схема будет более сложной, чем дифференциальная, поскольку потребуется удвоенное число выпрямителей.