

§ 2.3. Чувствительность мостовой схемы
Чувствительность
уравновешенного моста определяется
как отношение приращения тока в
измерительной диагонали
![]() к вызвавшему его изменению сопротивления
одного из плеч моста (например,
к вызвавшему его изменению сопротивления
одного из плеч моста (например,![]() на
рис. 2.2):
на
рис. 2.2):
![]() .
В уравновешенном мосте
.
В уравновешенном мосте
![]() После
изменения
После
изменения
![]() на
на
![]() ток
прибора
ток
прибора
![]() определяется по (2.7) или (2.8):
определяется по (2.7) или (2.8):
![]()
Преобразуем
числитель этого выражения, учитывая
условие равновесия![]()
![]()
Следовательно,
![]() ,
и чувствительность уравновешенного
моста по току
,
и чувствительность уравновешенного
моста по току
![]() (2.12)
(2.12)
В некоторых случаях (например, в мостах с автоматическим уравновешиванием) входным сигналом мостовой схемы служит напряжение в измерительной диагонали БГ. Тогда следует определять чувствительность по напряжению: Оценим влияние сопротивлений плеч моста на чувствительность мостовой уравновешенной схемы. Для этого удобно выразить сопротивления всех плеч моста относительно измеряемого сопротивления R4.
Положим![]() ;
;
![]() ;
;
![]() .
Так как в уравновешенном мосту
.
Так как в уравновешенном мосту
![]() ,
то
,
то
![]() .
Подставим значения сопротивлении в
(2.12).
.
Подставим значения сопротивлении в
(2.12).
![]() 1.
Для высокоомного моста (полагая
1.
Для высокоомного моста (полагая![]() )
)
Анализ уравнения (2.15) показывает, что чувствительность возрастает с увеличением напряжения питания и уменьшением сопротивлений плеч моста. Эти выводы достаточно очевидны. При этом следует иметь в виду, что с уменьшением сопротивлений мост уже не будет высокоомным и к нему неприменимо уравнение (2.15). Менее очевидно, но представляет большой интерес влияние коэффициентов я, т, q. Рассмотрим функцию (2.16). При уменьшении я чувствительность схемы увеличивается. При неизменных коэффициентах п к q чувствительность моста максимальна при
![]()
Уравнение
(2.17) можно получить продифференцировав
![]() по
т
и
приравняв
по
т
и
приравняв![]() нулю.
нулю.
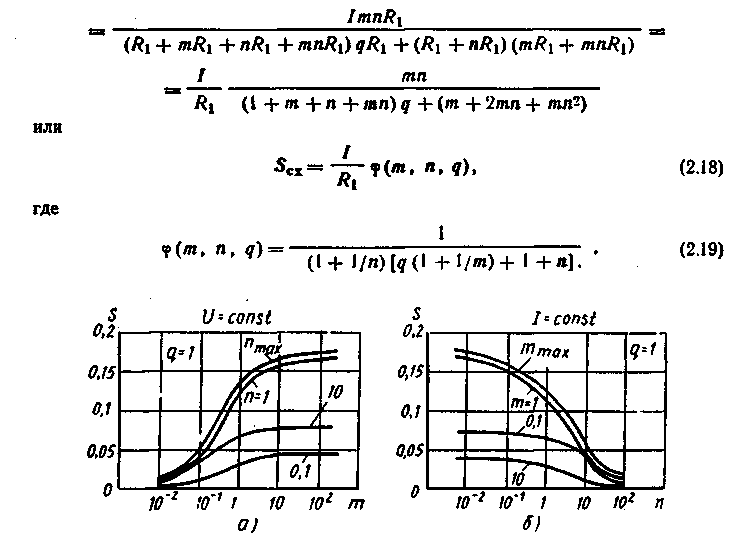
На
рис. 2.4, а
показаны
номограммы для случая![]() ,
с помощью которых можно определить т
и
я, т. е. сопротивления мостовой схемы.
По виду кривых можно судить о том, что
при известном и достаточно большом
диапазоне изменения значений
,
с помощью которых можно определить т
и
я, т. е. сопротивления мостовой схемы.
По виду кривых можно судить о том, что
при известном и достаточно большом
диапазоне изменения значений
![]() и
и
![]() чувствительность
мостовой схемы изменяется незначительно.
чувствительность
мостовой схемы изменяется незначительно.
Чувствительность
низкоомного моста (при![]() )
)
![]()
Анализ
уравнения (2.19) показывает, что при
увеличении т.
чувствительность
схемы возрастает. При неизменных
значениях
![]() и
и
![]() чувствительность
моста максимальна при
чувствительность
моста максимальна при
![]() (2.20)
(2.20)
Уравнение
(2.20) можно получить продифференцировав
![]() по
я
по
я
и
приравняв
![]() нулю.
Номограммы для случая
нулю.
Номограммы для случая
![]() показаны
на рис. 2.4, б.
показаны
на рис. 2.4, б.
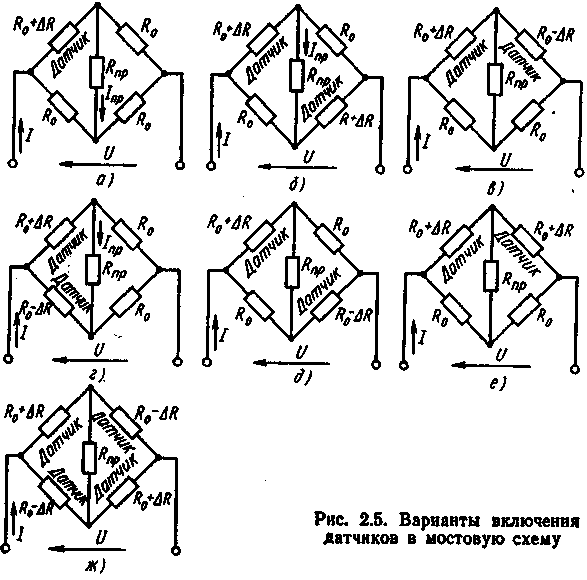
Рассмотрим
теперь чувствительность неуравновешенного
моста. Датчики с изменяющимся сопротивлением
![]() можно
включить в разные плечи моста. Рассмотрим
различные варианты подключения датчиков
(рис. 2.5).
можно
включить в разные плечи моста. Рассмотрим
различные варианты подключения датчиков
(рис. 2.5).
1.
Чаще всего используется простая (рис.
2.5, а)
схема
равноплечего (![]() )
моста с одним датчиком где
)
моста с одним датчиком где
![]() —
—
![]() сопротивление
датчика, соответствующее начальному
значению измеряемой неэлектрической
величины.
сопротивление
датчика, соответствующее начальному
значению измеряемой неэлектрической
величины.
Воспользуемся уравнением (2.8) для определения изменения тока через из мерительный прибор:
![]()
![]()
Для
малых приращений![]() можно
пренебречь в знаменателе слагаемыми
можно
пренебречь в знаменателе слагаемыми
![]() и
и![]() по
сравнению с другими слагаемыми
по
сравнению с другими слагаемыми
Чувствительность
схемы![]()
![]() (2.21)
(2.21)
Примем
чувствительность моста с одним датчиком
за исходную![]() и выразим чувствительность
всех других вариантов мостовых схем
через
и выразим чувствительность
всех других вариантов мостовых схем
через![]()
2.
На схеме рис. 2.5, б
одинаковые
датчики с изменяющимся сопротивлением![]() включены
в противоположные плечи моста. В этом
случае приращение
тока в измерительном приборе
включены
в противоположные плечи моста. В этом
случае приращение
тока в измерительном приборе
![]()
т.
е. чувствительность![]() увеличивается
вдвое. Такое же увеличение чувствительности
получается в схеме рис. 2.5, в,
где
второй датчик включен не в противоположное,
а в соседнее плечо и его сопротивление
не увеличивается, а
уменьшается:
увеличивается
вдвое. Такое же увеличение чувствительности
получается в схеме рис. 2.5, в,
где
второй датчик включен не в противоположное,
а в соседнее плечо и его сопротивление
не увеличивается, а
уменьшается:![]() В
схемах по рис. 2.5, а—в
чувствительность
непостоянна,
т. е. зависимость
В
схемах по рис. 2.5, а—в
чувствительность
непостоянна,
т. е. зависимость![]() нелинейна.
нелинейна.
3. Если
датчики с изменяющимися сопротивлениями
включить в соседние
плечи
моста по схеме рис. 2.5, г
(![]() —в
плечо
—в
плечо
![]() ,
а
,
а![]() —в
плечо
—в
плечо
![]() ),
то чувствительность его по-прежнему в
два раза больше
),
то чувствительность его по-прежнему в
два раза больше
![]() ,
а зависимость
,
а зависимость![]() близка
к линейной в довольно широких
пределах.
близка
к линейной в довольно широких
пределах.
Недостаток схемы в том, что если датчиками являются сопротивления с подвижным контактом, то питание к схеме подводится именно через этот подвижный контакт, что снижает надежность схемы.
При включении датчиков по схемам, показанным на рис. 2.5, д, е, изменение сопротивления одновременно в обоих плечах не приводит к изменению тока в измерительном приборе, т. е.
 Такое
подключение датчиков является
ошибочным.
Такое
подключение датчиков является
ошибочным.Если включить четыре одинаковых датчика во все четыре плеча моста так. как показано на рис. 2.5, ж, то изменение тока в измерительном приборе
![]() При
этом обеспечивается максимальная
чувствительность
При
этом обеспечивается максимальная
чувствительность![]()