

§ 19.7. Шаговые искатели и распределители
Шаговые искатели и распределители под действием управляющего сигнала осуществляют поочередное переключение нескольких исполнительных цепей. В простейшем случае шаговый искатель (рис. 19.9, а) имеет один входной зажим и несколько выходных. При подаче управляющего импульса в обмотку электромагнита (ЭМ) входной зажим перемещается на один шаг, соединяясь с очередным выходным зажимом. Следовательно, номер ламели, цепь возврата размыкается и ускоренное движение шаго вого механизма прекращается. С помощью шагово-декадных рас пределителей осуществляется, например, автоматическая телефон ная связь. Когда мы набираем номер вызываемого телефона, т< диск телефонного аппарата дает столько импульсов, до какой циф ры мы его повернули. При этом шагово-декадный распределител! произвел соединение с соответствующим выходным проводом и од новременно подключил очередную декаду ламелей (новый ря; из десяти ламелей).
В шаговых искателях разных типов число рядов ламелей может достигать 8, а число ламелей в ряду — 50. Все шаговые искатели рассчитаны на работу в импульсном режиме с частотой до 10 срабатываний в секунду.
§ 19.8. Магнитоуправляемые контакты. Типы и устройство
В обычных электромагнитных реле наиболее часто отказ возникает из-за контактов, которые подвергаются вредным воздействиям окружающей среды (окислению, загрязнению, коррозии и др.). Существенно повысить надежность реле можно за • счет герметизации контактов. Так как в этом случае невозможно механически связать контактный узел с электромагнитным приводом, то необходимо для перемещения герметизированных контактов использовать силы электромагнитного притяжения. Контактные пластины для этого изготовляются из ферромагнитного материала. Таким образом, контакты становятся магнитоуправ-ляемыми.
К магнитоуправляемым контактам относятся герконы (т. е. герметизированные контакты) и ферриды. Применяются они для тех же целей, что и мощные электромагнитные реле. Они и возникли в результате совершенствования контактных электромагнитных устройств и стремления свести к минимуму их недостатки: сравнительно небольшой срок службы (до 107 срабатываний), невысокое быстродействие (десятки миллисекунд), потребление энергии в течение всего периода притяжения якоря и необходимость периодического обслуживания.
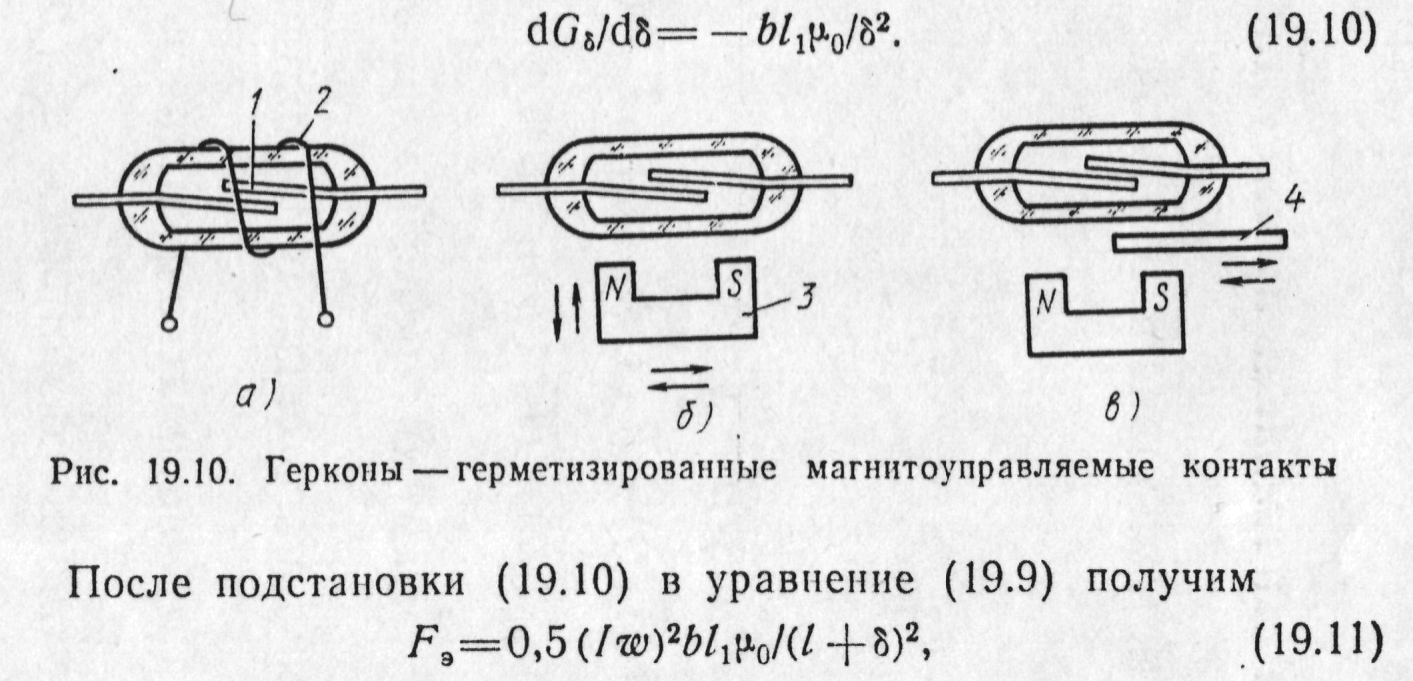
Геркон (рис. 19.10, а) представляет собой впаянные в стеклянную ампулу (баллон) пермаллоевые пластины /, служащие одновременно токоподводами, контактами и магнитопроводом. Пластины впаяны в ампулу таким образом, чтобы контакты, в качестве которых используются внутренние концы пластин, покрытые золотом, радием или вольфрамом, находились на некотором расстоянии друг от друга, т. е. были разомкнуты.
К наружным концам пластин припаивают провода, служащие для присоединения к внешней цепи. Если геркон поместить в магнитное поле, созданное током в обмотке 2, окружающей геркон, то на контакты будет действовать электромагнитная сила F3. Если эта сила окажется больше противодействующего усилия упругих пластин, то произойдет замыкание контактов.
Электромагнитная сила притяжения контактов определяется аналогично силе притяжения, действующей в любом другом электромагнитном механизме:
![]()
Принимая зазор между пластинами плоскопараллельным, можно записать выражение для производной проводимости:
где / — ток в обмотке; w — число витков; / — длина обмотки; /i — перекрытие пластин; b — ширина пластин.
После отключения обмотки пластины под действием сил упругости возвращаются в исходное состояние, т. е. контакты размыкаются. Следовательно, удержать контакт в замкнутом состоянии можно только за счет потребления энергии от сети, что является одним из недостатков геркона. Герконы бывают вакуумные и газонаполненные, в которых стеклянная ампула заполнена азотом, водородом или другим инертным газом.
Для управления магнитоуправляемым контактом можно использовать не только магнитное поле катушки с током (рис. 19.10, а), но и магнитное поле постоянного магнита (рис. 19.10,6). В последнем случае срабатывание контактов осуществляется в зависимости от взаимного перемещения геркона и постоянного магнита 3. Изменение магнитного поля, воздействующего на контакты, может осуществляться и за счет изменения параметров магнитной цепи при перемещении ферромагнитного экрана 4 (рис. 19.10, в).
Большая часть управляющего магнитного потока во всех схемах герконов, изображенных на рис. 19.10, проходит по воздуху. Так как воздушные участки имеют значительное магнитное сопротивление.