

§ 6.5. Магнитоупругие датчики
Принцип действия магнитоупругих датчиков основан на магнитоупругом эффекте — физическом явлении, проявляющемся в виде изменения магнитной проницаемости ферромагнитного материала в зависимости от механических напряжений в нем. Магнитоупругие датчики используются для измерения силовых параметров: усилий, давлений, крутящих и изгибающих моментов, механических напряжений и т. п.
конструктивно
магнитоупругие датчики представляют
магни-топровод
с одной или несколькими обмотками.
Магнитное сопротивление
сердечника
![]() ,
где
l
и 5 — длина и площадь сечения
сердечника. Если к сердечнику приложено
механическое усилие
F,
то
магнитная проницаемость р изменится.
Следовательно,
изменятся и магнитное сопротивление
сердечника, и индуктивность
обмотки на сердечнике. Как видим, есть
аналогия с индуктивными датчиками.
В индуктивных датчиках также происходит
изменение
магнитного сопротивления, но за счет
длины или сечения
воздушного зазора. В магнитоупругих
датчиках зазор не нужен,
сердечники могут быть замкнутыми.
,
где
l
и 5 — длина и площадь сечения
сердечника. Если к сердечнику приложено
механическое усилие
F,
то
магнитная проницаемость р изменится.
Следовательно,
изменятся и магнитное сопротивление
сердечника, и индуктивность
обмотки на сердечнике. Как видим, есть
аналогия с индуктивными датчиками.
В индуктивных датчиках также происходит
изменение
магнитного сопротивления, но за счет
длины или сечения
воздушного зазора. В магнитоупругих
датчиках зазор не нужен,
сердечники могут быть замкнутыми.
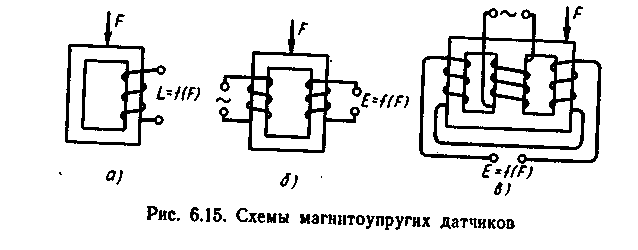
Так же как и индуктивные датчики, магнитоупругие датчики могут быть использованы в виде одинарных (рис. 6.15, а), трансформаторных (рис. 6.15, б), дифференциально-трансформаторных (рис. 6.15, в).
Зависимость
магнитной проницаемости от механических
напряжений
имеет нелинейный характер. Связано это
как с нелинейностью
кривой намагничивания, так и с нелинейной
зависимостью
деформаций от усилия. Нелинейность
магнитоупругого эффекта
выражена очень сильно. Например, в слабых
магнитных полях
магнитная проницаемость под действием
механических напряжений
возрастает, а в сильных полях —
уменьшается. Однако при
 определенных
значениях напряженности магнитного
поля Н
определенных
значениях напряженности магнитного
поля Н
Чувствительность магнитоупругого датчика определяется по формуле
![]()
к
линейной зависимость изменения магнитной
проницаемости
![]() .
сердечника от относительной
деформации
.
сердечника от относительной
деформации
![]() или нормального
механического напряжения
в
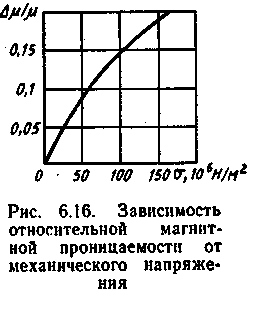
зоне линейных деформаций. Наиболее
заметен магнитоупругий эффект в
пер-маллоевых
(железокобальтовых и желе-зоникелевых)
сплавах. На рис. 6.16 показана
зависимость относительной магнитной
проницаемости
или нормального
механического напряжения
в
зоне линейных деформаций. Наиболее
заметен магнитоупругий эффект в
пер-маллоевых
(железокобальтовых и желе-зоникелевых)
сплавах. На рис. 6.16 показана
зависимость относительной магнитной
проницаемости
![]() от изменения
механического напряжения
.
Относительная
деформация
в
зоне упругих
деформаций связана с механическим
напряжением
а
через
модуль упругости Е:
от изменения
механического напряжения
.
Относительная
деформация
в
зоне упругих
деформаций связана с механическим
напряжением
а
через
модуль упругости Е:
![]()
она может достигать значений 200—300. Зависимость индуктивности от механического напряжения в для магнитоупругого датчика по рис. 6.15, а показана на рис. 6.17.
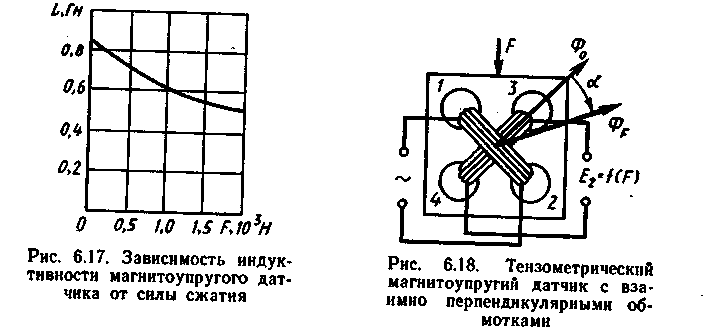
В магнитоупругих датчиках, используемых в тензометрах, маг-нитопровод имеет отверстия, в которые наматываются обмотки. На рис. 6.18 показан магнитоупругий датчик с взаимно перпендикулярными обмотками. Первичная обмотка, проходящая через отверстия 1 и 2, при отсутствии механической нагрузки (F=0) создает магнитный поток Ф0, не сцепленный с витками вторичной обмотки, проходящей через отверстия 3 и 4.
Под действием усилия F в основном изменяется магнитная проницаемость в направлении сжатия, что вызывает поворот вектора магнитной индукции на угол а и одновременно изменение магнитного потока ФF. Этот поток уже пересекает плоскость вторичной обмотки, на выходе которой появляется ЭДС Е2.
Если до приложения усилия магнитный материал был изотропен (имел одинаковые магнитные свойства во всех направлениях), то при наличии усилия материал становится анизотропным. Угол поворота а вектора магнитной индукции достигает 10—12°.
К достоинствам магнитоупругих датчиков следует отнести высокую чувствительность и возможность измерения больших усилий (до нескольких тысяч тонн). В то же время магнитоупругие датчики имеют и следующие серьезные недостатки: 1) наличие температурной погрешности, вызванной влиянием температуры ок-
ружающей среды на магнитные свойства сердечника; 2) наличие погрешности, вызванной влиянием гистерезиса (как магнитного, так и механического, связанного с остаточной деформацией); 3) наличие погрешности, вызванной колебаниями напряжения питания.
Следует отметить, что в магнитоупругих датчиках имеет место и еще одно физическое явление — магнитострикционный эффект. Его действие обратно магнитоупругому эффекту: ферромагнитное тело, помещенное в магнитное поле, изменяет свои геометрические размеры, т. е. в нем появляются механические деформации.
В переменном магнитном поле и деформации будут переменными. А так как знак деформации не зависит от направления магнитного поля, то частота колебаний деформации будет в два раза выше частоты переменного тока. На этом принципе работают, например, магиитострикционные излучатели ультразвуковых колебаний.