

§ 3.2. Контактные датчики с дискретным выходным сигналом
Контактные датчики относятся к параметрическим, поскольку их электрическое сопротивление изменяется в зависимости от входной механической величины. Так как сопротивление изменяется скачком (в результате замыкания или размыкания контактов), то контактные датчики имеют дискретный выходной сигнал. Статическая характеристика контактного датчика имеет релейный характер. Можно считать, что выходной сигнал несет информацию типа «да—нет> или «больше—меньше». Поэтому контактные датчики применяются в основном в системах автоматического контроля и сортировки размеров, а также в системах автоматической сигнализации различных физических величин, преобразуемых в перемещение.
Электрические контактные датчики, используемые для контроля размеров деталей, делят на предельные, определяющие, находится ли заданный размер в поле допуска, и амплитудные, измеряющие отклонения детали от заданной геометрической формы.
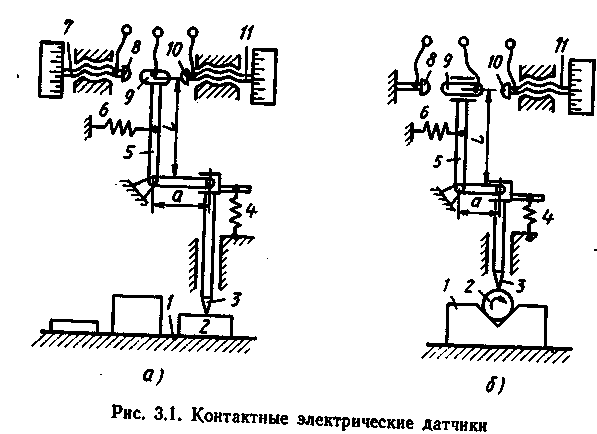
Рассмотрим работу предельного контактного датчика (рис. 3.1, а). На установочной плите / размещена деталь 2, точность выполнения вертикального размера которой необходимо контролировать. К Детали подводится измерительный щуп 3 и прижимается с помощью пружины 4. В зависимости от размера детали щуп перемещается в вертикальном направлении, поворачивая рычаг 5, несущий подвижный контакт 9. При опускании щупа замыкается неподвижный контакт 10, при поднятии — контакт 8. Замыкание происходит в том случае, когда размер детали имеет отклонение в большую или меньшую сторону сверх допустимого. Допустимые пределы отклонения могут быть установлены с помощью настроечных винтов 7 и //. Для обеспечения достаточного контактного нажатия служит пружина 6. Электрические зажимы для подключения подвижного контакта 9 и неподвижных контактов 8 и 10 в электрическую цепь на данной кинематической схеме не показаны.
Амплитудный датчик (рис. 3.1, б) отличается от предельного тем, что подвижный контакт 9 имеет осевое перемещение в направляющих рычага 5. При вращении детали 2 в призме / сначала происходит замыкание подвижного контакта 9 с неподвижным I контактом 8. Если щуп 3 продолжает подниматься, то рычаг перемещается влево, проскальзывая через подвижный контакт 9. Затем, когда максимальный размер будет пройден (т. е. щуп начнет опускаться), рычаг переместится вправо, увлекая за собой ) без проскальзывания подвижный контакт. Если отклонение раз-;' мера превышает допустимое, то подвижный контакт замкнется со вторым неподвижным контактом 10 и в электрическую цепь подается сигнал о том, что деталь бракованная. На предельное отклонение размера датчик настраивают с помощью винта 11, используя эталонную деталь.
Рычажная
система электроконтактных датчиков
играет важную
роль. Надежное замыкание и особенно
размыкание контактов
при малом расстоянии Между ними
невозможны. Рычажная система
позволяет увеличить это расстояние за
счет того, что отношение
размеров![]() (рис.
3.1). При замыкании контактов датчика
происходит изменение сопротивления
между подвижным и
неподвижным контактами от бесконечности
до ничтожно малой величины,
определяемой значением контактного
сопротивления.
(рис.
3.1). При замыкании контактов датчика
происходит изменение сопротивления
между подвижным и
неподвижным контактами от бесконечности
до ничтожно малой величины,
определяемой значением контактного
сопротивления.
Для уменьшения погрешности измерения рычаги выполняют не на шарнирах, имеющих зазоры между отверстием и осью, а на плоских пружинах. Недостатками рычажных систем являются необходимость в значительных усилиях для перемещения щупа (0,1—3 Н) и повышенная инерционность.
Датчик,
показанный на рис. 3.1, является
двухпредельным. При
необходимости используют одно- и
многопредельные датчики.
На рис. 3.2 показаны многопредельные
датчики. Контакты 1—3
замыкаются
последовательно друг за другом при
перемещении измерительного щупа 4,
контролирующего
соответственно размеры деталей![]() .
Подсоединение подвижного контакта во
внешнюю
цепь осуществляется с помощью пружинного
подвода
5. Контактный датчик, приведенный на
рис. 3.2, а,
переключает
несколько цепей сигнализации, а датчик
на рис. 3.2, б выполняет
последовательное замыкание частей
резистора R,
имеющего
несколько отводов. В последнем случае
происходит ступенчатое
уменьшение активного сопротивления,
включенного в общую
внешнюю
цепь.
.
Подсоединение подвижного контакта во
внешнюю
цепь осуществляется с помощью пружинного
подвода
5. Контактный датчик, приведенный на
рис. 3.2, а,
переключает
несколько цепей сигнализации, а датчик
на рис. 3.2, б выполняет
последовательное замыкание частей
резистора R,
имеющего
несколько отводов. В последнем случае
происходит ступенчатое
уменьшение активного сопротивления,
включенного в общую
внешнюю
цепь.
Контактные многопредельные датчики используют в сортировочных автоматах, разделяющих детали по размерам с достаточно высокой точностью (несколько микрометров). Производительность сортировочных автоматов достигает нескольких сотен деталей в минуту. Это предъявляет высокие требования к надежности и точности контактных датчиков. Технические показатели датчиков в значительной степени зависят от материала и качества изготовления контактных пар. Нарушение контакта приводит к отказу датчика, а обгорание и износ контактов снижают точность контроля размеров. Поэтому очень важно создать благоприятные условия для работы контактов путем снижения разрывной мощности.
Нагрузкой контактных датчиков довольно часто являются сигнальные лампы. При использовании для сигнализации обычных ламп накаливания разрывная мощность довольно велика (несколько ватт). Для уменьшения искро- и дугообразования применяют искрогасительную цепочку, состоящую из последовательно соединенных конденсатора и разрядного активного сопротивления.

Такая цепочка подключается параллельно контактам датчика. Для повышения надежности контактных датчиков применяют неоновые лампочки, которые потребляют значительно меньшую (по сравнению с лампами накаливания) мощность: 80— 150 мВт (ток 1—1,5 мА при напряжении 80—100 В). Еще большего снижения разрывной мощности можно достичь подключая контакты в цепь управления электронных и полупроводниковых усилителей с большим входным сопротивлением.
Материалы для контактов выбираются в зависимости от контактного давления и условий работы датчика. Для высокочувствительных маломощных контактных датчиков давление на контактах изменяется от 0,001 до 0,02 Н. Контакты таких датчиков выполняют из драгоценных металлов (платина, золото и их сплавы), которые почти не окисляются в нормальных атмосферных условиях. Однако их износоустойчивость и твердость невелики. При контактных давлениях 0,05—1 Н применяют серебряные контакты. Для мощных контактных датчиков контактные усилия составляют несколько ньютон, а в качестве материала контактов используют вольфрам, молибден и их сплавы, обладающие высокими твердостью и износоустойчивостью.
Вообще проблема контактов и их надежности очень важна для многих электрических элементов автоматики. Более подробно вопросы выбора материалов и конструкций контактов рассмотрены в гл. 16.
В качестве контактных датчиков могут быть использованы и рассматриваемые в гл. 15 путевые и конечные выключатели. По сравнению с описанными контактными датчиками они требуют существенно больших усилий для перемещения контактов и имеют менее высокую точность, но зато могут быть использованы в более мощных цепях.
Достоинствами контактных датчиков являются простота и дешевизна конструкции, простота регулировки чувствительности, высокая точность, возможность работы в цепях постоянного и переменного токов. К. недостаткам относятся трудность обеспечения высокой надежности из-за наличия электрической дуги и искрения, возможность ложных срабатываний при наличии вибраций и ударной нагрузки.