3 Операторные уравнения и передаточные функции системы.
Структурная схема
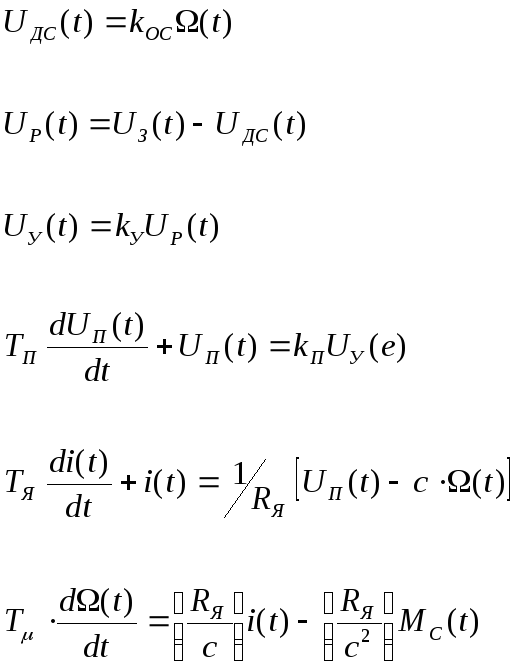
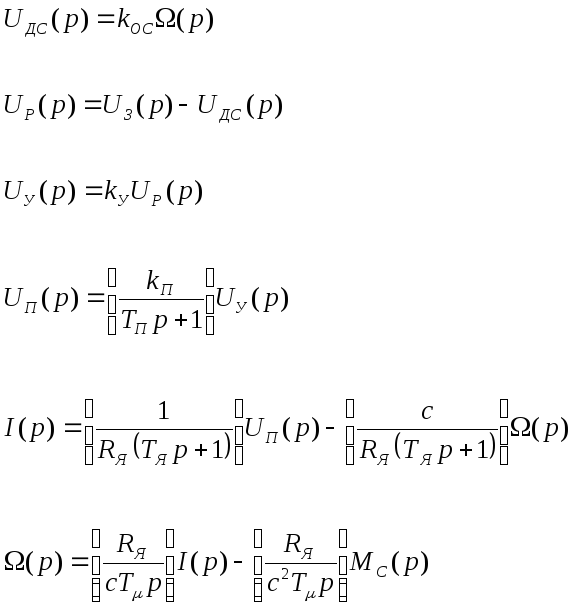
3.1 Дифференциальные уравнения звеньев в изображениях по Лапласу при нулевых начальных условиях
Уравнения системы в оригиналахОператорные уравнения
3 .2
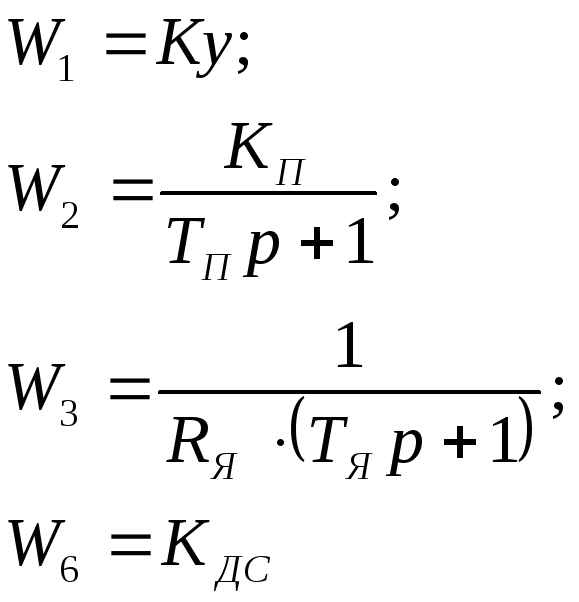
Передаточные функции звеньев системы
.2
Передаточные функции звеньев системы
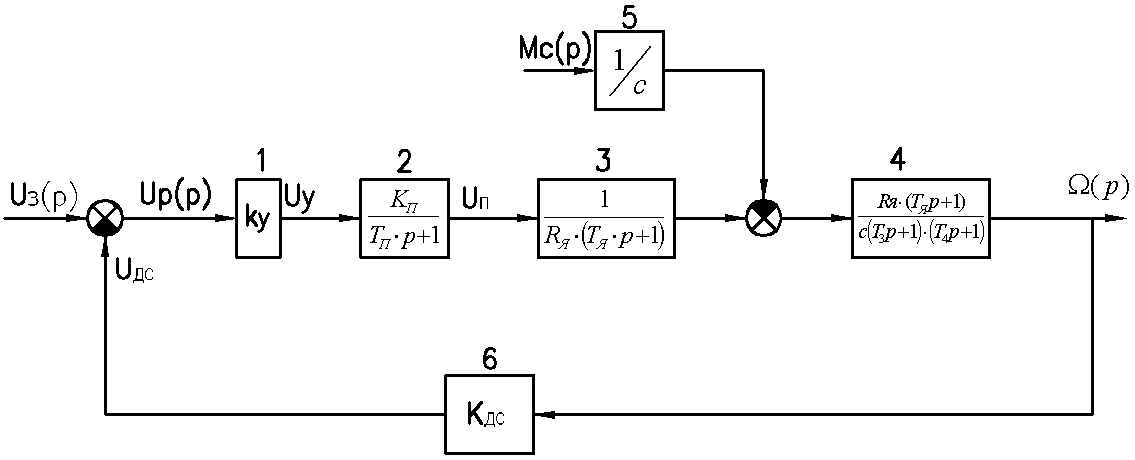
3.3 Составляем структурную схему системы
Рисунок – 3 Структурная схема исследуемой
САР

преобразуем структурную схему:
заменяем встречно-параллельное соединение звеньев 7 и 8 одним звеном 4, и переносим сумматор влево через звено 4
передаточная функция 4-го звена
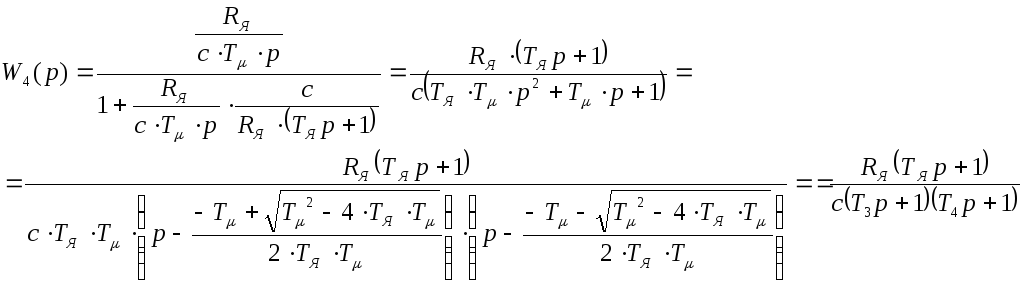
где ![]() T3=0.028, T4=0.072
T3=0.028, T4=0.072
Рисунок – 4 Преобразованная структурная
схема исследуемой САР
4 Передаточные функции двигателя для угловой скорости по напряжению на якоре и по моменту сопротивления.
4.1 Передаточная функция двигателя для угловой скорости по напряжению на якоре
![]()
4.2 Передаточная функция двигателя для угловой скорости по моменту сопротивления
![]()
5 Передаточные функции, характеристические уравнения замкнутой и разомкнутой систем, операторные уравнения для регулируемой величины и ошибки
5.1 Передаточная функция разомкнутой системы
![]()
характеристическое уравнение разомкнутой системы:
![]()
5.2 Передаточная функция замкнутой системы для регулируемой величины Ωпо задающему напряжениюUЗпри моменте сопротивленияMC =0.
![]()
характеристическое уравнение замкнутой системы
![]()
5.3 Передаточная функция замкнутой системы для регулируемой величины Ωпо моменту сопротивленияMC при задающем напряженииUЗ=0.

5.4 Передаточная функция замкнутой системы для ошибки UP по задающему напряжению UЗ при моменте сопротивления MC =0.

5.5 Передаточная функция замкнутой системы для ошибки UPпо моменту сопротивленияMC при задающем напряженииUЗ=0.

5.6 Операторные уравнения для регулируемой величины и ошибки
Согласно принципу суперпозиции изображение регулируемой величины:
![]() ,
,
а![]() изображение ошибки:
изображение ошибки:
6 Аналитические выражения статических характеристик
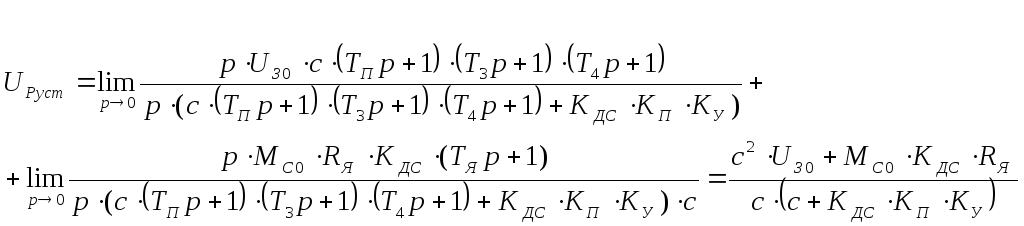
6.1 Установившаяся ошибка UPуст.
Установившаяся ошибка UPуст в системе определяется по изображению ошибки
(пп. 5.6)
![]()
при условии, что UЗ=UЗ0=const, a MC=MC0=const.
Для нахождения аналитического выражения установившейся ошибки воспользуемся формулой, в соответствии с которой установившееся значение произвольной координаты y(t), если оно существует, может быть вычислено по изображению этой координаты Y(p) согласно теореме об установившемся значении оригинала.
![]()
имеем:

Подставим изображение задающего напряжения и момента сопротивления, учитывая то, что UЗ(t)= UЗ0, а МС(t)= МС0
Имеем:
6.2 Установившаяся скорость Ωуст в замкнутой системе
изображение скорости:
![]()
 ,
где
,
где
![]() ;
;
![]()
Подставим изображение задающего напряжения и момента сопротивления, учитывая то, что UЗ(t)= UЗ0, а МС(t)= МС0
формула для вычисления установившейся скорости Ωycm
![]()
Система является статичной, т.к. установившаяся ошибка не равна нулю
6.3 Установившаяся скорость Ωrуств разомкнутой системе
С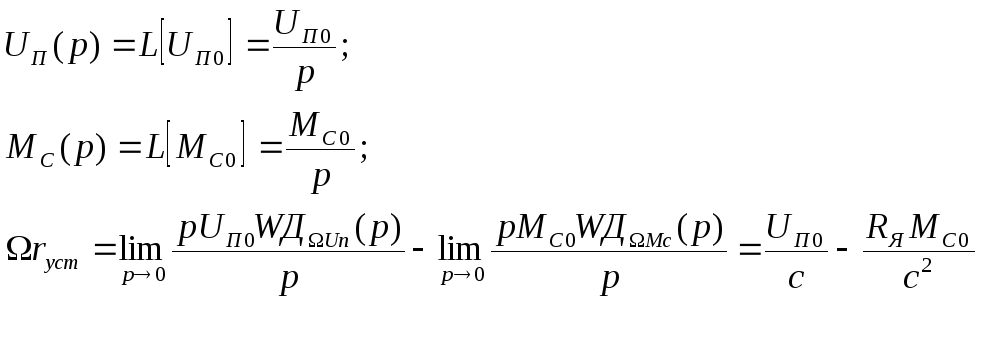 читаем
UП
(t)= UП0
=const, MC
(t)= MC0
=const, тогда
читаем
UП
(t)= UП0
=const, MC
(t)= MC0
=const, тогда
, где
![]() - передаточная
функция двигателя для угловой скорости
по напряжению на якоре
- передаточная
функция двигателя для угловой скорости
по напряжению на якоре
![]()
![]() - передаточная
функция двигателя для угловой скорости
по моменту сопротивления
- передаточная
функция двигателя для угловой скорости
по моменту сопротивления
![]()
7 Определение коэффициента усиления разомкнутой системы (К), обеспечивающего статическое изменение регулируемой величины ΔΩст не более 1.5 рад/с при изменении момента сопротивления MC от 0 до 1200 (Н·м)
Аналитическое выражение для установившейся скорости
![]()
Считаем UЗ (t)= UЗ0 =const, получаем
![]() ,
,
учитывая, что
Mc01=0,
Mc02=1200,
а ![]() Н·м, получаем неравенство:
Н·м, получаем неравенство:
![]() ,
решаем неравенство относительно общего
коэффициента усиления разомкнутой
системы
,
решаем неравенство относительно общего
коэффициента усиления разомкнутой
системы
![]()
![]() →
→
![]() ,
подставив числовые значения параметровc=
1.35, Rя=0.03,
получим:
,
подставив числовые значения параметровc=
1.35, Rя=0.03,
получим:
![]() ,
учитывая, что коэффициентыKдс
и Kп
заданы, находим
,
учитывая, что коэффициентыKдс
и Kп
заданы, находим
![]() ,
,![]() .
.
8 Статические характеристики Ω(MC) замкнутой и разомкнутой систем при значении скорости холостого хода Ω0 =150 рад/с.
8.1 Замкнутая система
установившаяся скорость в замкнутой системе (пп. 6.2)
![]()
В этой формуле первое слагаемое – скорость холостого хода (при Мс=0).
Получаем статическую характеристику замкнутой системы:
![]()
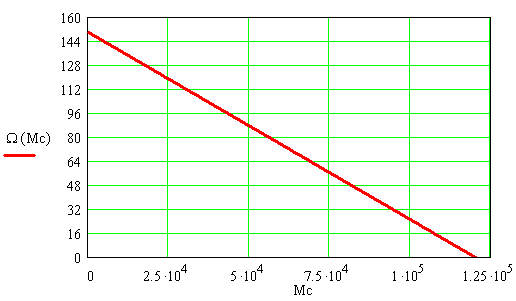
Рисунок – 5 Статическая характеристика
замкнутой системы
8.2 Разомкнутая система
У![]() становившаяся
скорость в разомкнутой системе (пп. 6.3)
становившаяся
скорость в разомкнутой системе (пп. 6.3)
Рисунок – 6 Статическая характеристика
разомкнутой системы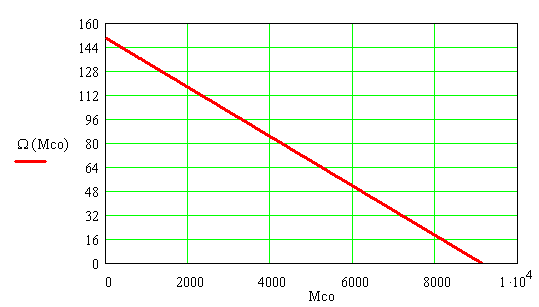
10 Синтез последовательного корректирующего устройства методом логарифмических частотных характеристик
Желаемая система должна иметь время регулирования (tP) по задающему воздействию не более 0.5с и перерегулирование (σ) не более 20%. Последовательное корректирующее устройство включают непосредственно после элемента сравнения или после предварительного усилителя.
LК=LЖ–LН , где LК – ЛАЧХ последовательной корректирующей цепи, LН – ЛАЧХ основной разомкнутой системы, LЖ – желаемая ЛАЧХ системы, определяемая по заданным tP и σ.
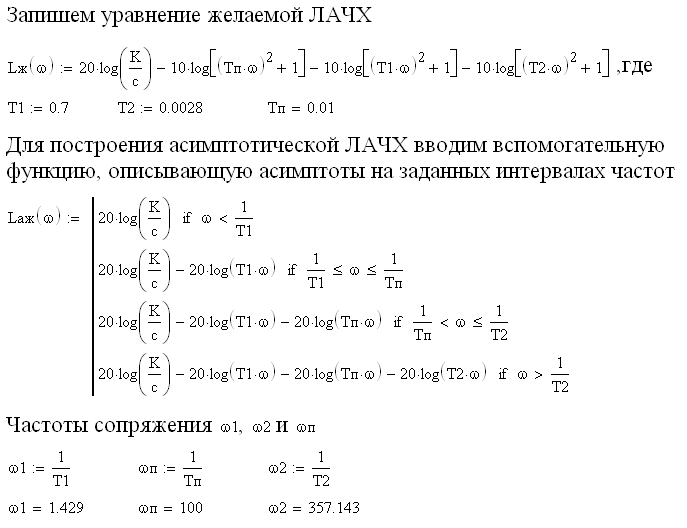
Определяем параметры желаемой ЛАЧХ:
Частота среза ωC
среднечастотной части LЖ
определяем по формуле
![]() ,
где
,
где![]() ,
находим по заданному параметру времени
регулирования
,
находим по заданному параметру времени
регулирования![]() ,
,![]() =21.4
=21.4![]() ,возьмём
,возьмём
![]() ;
для обеспечения приемлемого переходного
процесса, через частоту
;
для обеспечения приемлемого переходного
процесса, через частоту![]() ,
проводим отрезок с наклоном
,
проводим отрезок с наклоном![]()
Величине
перерегулирования 20% соответствует
![]() ,
,![]() ,
запас влево и вправо, от частоты среза
,
запас влево и вправо, от частоты среза![]()
Низкочастотный
участок желаемой ЛАЧХ повторяет
низкочастотный участок нескорректированной,
частота сопряжения ![]()
Для упрощения
передаточной функции корректирующего
устройства, вправо продлим среднечастотный
участок до частоты ![]()
Высокочастотная
часть желаемой ЛАЧХ совпадает с
высокочастотной частью ЛАЧХ
нескорректированной системы, сопряжение
среднечастотной и высокочастотной
частей ЛАЧХ производим отрезком с
наклоном -40![]()
Частота сопряжения
![]()
Желаемая ЛАЧХ имеет следующее уравнение
![]() ,
где
,
где
T1=0.7, T2=0.0028, Tп=0.01
Находим ЛАЧХ корректирующего устройства
LКУ=LЖ–LНСК
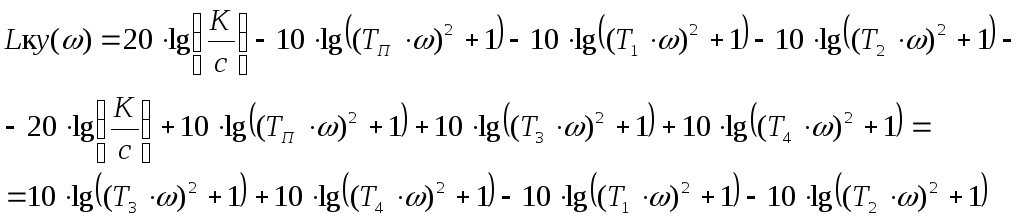
П![]() ередаточная
функция корректирующего устройства:
ередаточная
функция корректирующего устройства:
соответствует схеме рисунок 11
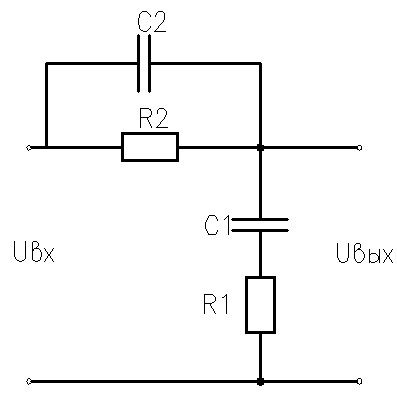
для такого RC
контура
![]()
![]()
![]()
Пусть C1=C2=1мкФ, тогда
![]() кОм
кОм
![]() кОм
кОм
Рисунок – 11 Схема корректирующего устройства