

1 Задание на курсовую работу
Задана система стабилизации скорости вращения двигателя постоянного тока
Система предназначена для приведения рабочего органа машины (РО) во вращение с заданной скоростью и состоит (рисунок - 1) из электродвигателя (Д), преобразователя (П), усилителя (У), датчика скорости (ДС) и задающего потенциометра (ЗП).
Уравнения динамики элементов системы имеют вид:
а) датчика скорости
uДС(t)=kДС(t);
б) сравнивающего устройства (на входе У)
up(t)=uз(t)-uдс(t);
г) преобразователя
![]()
д) силовой цепи “преобразователь-двигатель”
![]()
е) уравнение механического движения
![]()
где uз(t),uдс(t),uу(t),uп(t) – напряжения на выходе соответственно задающего устройства, датчика скорости, усилителя, преобразователя;
uр(t) – напряжение рассогласования(ошибка);
i(t) – ток в силовой цепи преобразователь-двигатель;
Ω(t) – угловая скорость;
Mc(t) – момент сопротивления;
ky,kп,kдс– коэффициенты передачи соответственно усилителя, преобразователя, датчика скорости;
RЯ– сопротивление цепи якоря электродвигателя;
c– коэффициент двигателя;
TЯ, Тμ– электромагнитная и электромеханическая постоянные времени привода;
TП– постоянная времени преобразователя.
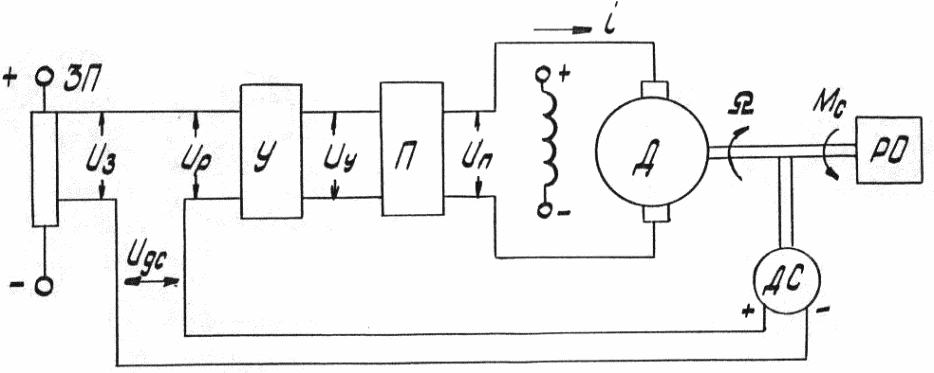
Рисунок – 1 Система стабилизации скорости вращения двигателя постоянного тока.
Задание
Определить принцип построения системы. Составить функциональную схему и показать её взаимосвязь с принципиальной схемой. Привести краткое описание работы схемы при подаче на вход задающего напряжения и при увеличении момента сопротивления.
Записать дифференциальные уравнения звеньев в изображениях по Лапласу при нулевых начальных условиях. Получить передаточные функции всех звеньев и составить структурную схему системы.
Найти передаточные функции двигателя для угловой скорости по напряжению на якоре и по моменту сопротивления.
Получить по структурной схеме передаточную функцию разомкнутой системы и четыре передаточных функции замкнутой системы: для регулируемой величины и для ошибки по задающему напряжению и по моменту сопротивления. Записать операторные уравнения для регулируемой величины и для ошибки. Получить характеристические уравнения разомкнутой и замкнутой систем и сравнить их между собой.
Используя операторные уравнения замкнутой системы для регулируемой величины и ошибки, получить аналитические выражения статических характеристик. Определить, является система статической или астатической.
Определить требуемый коэффициент усиления разомкнутой системы(К), обеспечивающий статическое изменение регулируемой величины ст не более 1.5 рад/с, если момент сопротивления изменился от 0 до Мс. Исходя из этого, найти коэффициент усиления усилителя.
Построить статические характеристики (Мс) замкнутой и разомкнутой систем при значении скорости холостого хода0=150 рад/с.
Построить логарифмические амплитудную и фазовую частотные характеристики разомкнутой системы. Проанализировать устойчивость замкнутой системы по виду ЛАЧХ и ЛФЧХ.
Провести синтез корректирующего устройства методом логарифмических частотных характеристик. Желаемая система должна иметь время регулирования(tр) по задающему воздействию не более 0.5 с и перерегулирование (), не превышающее 20%. Выбрать место включения, схему и рассчитать параметры корректирующего устройства.
Рассчитать переходные процессы в скорректированной системе, обусловленные ступенчатым приложением задающего воздействия Uз=5Bи ступенчатым изменением момента сопротивления на величину Мс, указанную в таблице. Дать анализ полученных результатов.
Числовые значения параметров
-
Вариант
ТП
(с)
ТЯ
(с)
Тμ
(с )
Кдс
(Вс/рад)
RЯ
(Oм)
c
(Bc/рад)
КП
ΔМС
(Нм)
8
0.01
0.02
0.1
0.07
0.03
1.35
30
1200