

Назначение Лаг лдв-1 обеспечивает измерение:
1. Продольной составляющей скорости судна в пределах от –5 до +30 узлов;
относительно воды; б ) относительно грунта на глубинах от 1 до 20 м.
2. Пройденного расстояния от 0 до 100 000 миль с дискретностью 0,1 мили. Лаг обеспечивает отображение следующей информации:
отображение скорости судна на трехразрядном цифровом индикаторе с дискретностью 0,1 узла;
отображение пройденного расстояния с помощью двух механических счетчиков:
счетчик общего пройденного расстояния; счетчик расстояния со сбросом показаний до нуля.
автоматическая выдача информации в сопрягаемое оборудование:
16-разрядный синхронный последовательный код; периодическая последовательность импульсов с частотой повторения, пропорциональной скорости, в масштабе 200 имп/милю; последовательность импульсов в масштабе 10 имп/милю; последовательность импульсов в масштабе 1 имп/милю; аналоговый выход – изменение напряжения 0¸10 в при изменении скорости 0¸30 узлов.
Основные технические характеристики Рабочая частота – 1 МГц; Мощность излучения в импульсе – 10 Вт; Ширина характеристики направленности акустической антенны – 3,5 град. Угол наклона акустических осей преобразователей от вертикали – ±30°
Устройство и работа лага Принцип действия
Принцип
действия лага ЛДВ-1 основан на использовании
эффекта Допплера. Зависимость изменения
частоты эхосигналов, принимаемых
антенной выражается линейным соотношением:
FД
= V
![]() Sin
J
; где FД
(МГц) – допплеровское смещение
частоты, представляющее собой разность
частот эхосигналов, принимаемых
преобразователями “Вперед” и “Назад”;
V (м/с) – продольная составляющая
скорости судна; F0
(МГц) – частота излучения; с
(м/с) – скорость звука в точке приема
эхосигналов; J
(град.) – угол наклона акустических
преобразователей к вертикали.
Sin
J
; где FД
(МГц) – допплеровское смещение
частоты, представляющее собой разность
частот эхосигналов, принимаемых
преобразователями “Вперед” и “Назад”;
V (м/с) – продольная составляющая
скорости судна; F0
(МГц) – частота излучения; с
(м/с) – скорость звука в точке приема
эхосигналов; J
(град.) – угол наклона акустических
преобразователей к вертикали.
Приемоизлучающая часть Приемоизлучающая часть лага выполнена по двухканальной схеме. В этой схеме передача и прием акустических импульсов обеспечивается двумя приемопередатчиками: приемопередатчиком с условным наименованием "Вперед" и приемопередатчиком с условным наименованием "Назад". Акустическая антенна выполнена по системе "Янус". Антенна состоит из двух пьезоэлектрических преобразователей, каждый из которых подключен к соответствующему приемопередатчику. Акустическая ось преобразователя, подключенного к приемопередатчику "Вперед", отклонена от вертикали на угол J = 30° в сторону направления движения судна, а акустическая ось преобразователя, подключенного к приемопередатчику "Назад", – отклонена на угол J = 30° в сторону, противоположную направлению движения судна.
Указанные каналы работают поочередно в следующей последовательности: сначала происходит излучение зондирующего импульса в канале приемопередатчика "Вперед", затем осуществляется прием эхосигналов в этом канале, и только после этого происходит излучение и прием акустических импульсов в канале приемопередатчика "Назад".
Синхрогенератор Синхронизация работы всех устройств лага осуществляется синхрогенератором. Основу синхрогенератора составляет кварцевый генератор с рабочей частотой 16 кГц. Все рабочие и управляющие импульсы синхрогенератора формируются путем деления частоты кварцевого генератора. Рабочая частота (1 МГц), длительность и период повторения импульсов, излучаемых акустическими преобразователями каналов "Вперед" и "Назад", определяются соответствующими параметрами управляющих радиоимпульсов, которые формируются в синхрогенераторе и подаются на управляющие входы приемопередатчиков "Вперед" и "Назад".
Селектор импульсов Эхосигналы, принимаемые акустическими преобразователями, после усиления и обработки в приемо-усилительных трактах соответствующих приемопередатчиков, поступают в селектор импульсов.
В состав селектора импульсов входят: электронный переключатель; детектор донных импульсов; детектор нуля; цепь фазовой синхронизации. Эхосигналы приемопередатчика "Вперед" и эхосигналы приемопередатчика "Назад", поступающие в селектор импульсов, подаются на сигнальные входы электронного переключателя. Электронный переключатель предназначен для поочередного подключения эхосигналов, полученных в каждом из каналов "Вперед" и "Назад", ко входам детектора донных импульсов, детектора нуля и цепи фазовой синхронизации, входящих в состав селектора импульсов. Управление
переключением каналов "Вперед" и "Назад" осуществляется коммутирующими импульсами, формируемыми в синхрогенераторе. Детектор донных импульсов обнаруживает донные эхосигналы, если глубина под килем менее 20 м. При этом, в зависимости от глубины, устанавливается один из четырех донных режимов работы лага. Каждому из четырех режимов соответствует определенная длительность излучаемых импульсов и определенный период повторения зондирующих импульсов. Кроме того, при глубине менее 5 м устанавливается пониженная мощность излучения (1 : 10). Если донные эхосигналы отсутствуют, то автоматически устанавливается режим работы относительно воды. В этом случае обрабатываются сигналы объемной реверберации от слоя воды 4 ¸ 10 м. Параметры работы лага, соответствующие каждому из перечисленных режимов, приведены в таблице 1. Учитывая, что излучение зондирующих импульсов производится поочередно "Вперед" и "Назад", фактический период повторения импульсов в каждом направлении будет в два раза больше, чем указано в таблице.
Детектор нуля служит для автоматического обнаружения полезных сигналов на фоне шумов. Детектор нуля выделяет эхосигналы, амплитуда которых превышает заданный уровень. Цепь фазовой синхронизации служит для улучшения качества обработки эхосигналов. В этой части схемы происходит умножение частоты принятых эхосигналов. Цепь фазовой синхронизации повышает частоту эхосигналов в 16 раз.
Принимающий счетчик На выходе селектора импульсов формируется сигнал, частота которого равна (8 ± 8 FД) МГц. Этот сигнал поступает на принимающий счетчик. При движении судна принимающий счетчик считает частоту (8 ± 8 FД) МГц при приеме "Вперед", затем из полученного результата вычитает частоту (8 ± 8 FД) МГц при приеме "Назад". Разность частот между зондированием "Вперед" и "Назад" пропорциональна допплеровской частоте. Эта разностная частота поступает на счетчик скорости.
Счетчик скорости Чтобы повысить точность измерения скорости, счетчик измеряет среднюю скорость в течение заданного интервала интегрирования. Интервал интегрирования можно изменять с помощью переключателя "Время срабатывания.”
Вопрос №103
Принцип построения рыбопоисковых приборов.
Рыболокация
основана на эхо-методе, по которому
расстояние до отражающего объекта
вычисляется по формуле D=![]() T*C/2.
При постоянной скорости звука с=1500м/с
дистанция до цели определяется по малому
промежутку времени
T
прохождения импульса от момента излучения
до приема эхо-сигнала.
T*C/2.
При постоянной скорости звука с=1500м/с
дистанция до цели определяется по малому
промежутку времени
T
прохождения импульса от момента излучения
до приема эхо-сигнала.
Для реализации описанного принципа работы эхолот должен иметь в своем составе следующие основные узлы: Акустическая система; Коммутатор приема – передачи; Импульсный генератор; Приемо усилительное устройство; Устройства отображения информации;
Работа импульсного генератора синхронизируется импульсами запуска, поступающего от регистратора или индикатора, если последний работает автономно, т.е. регистратор выключен.
Акустическая система предназначена для излучения и приема ультразвуковых импульсов. В состав акустической системы могут быть включены две акустических антенны, одна из которых используется для излучения акустических колебаний, а другая – для приема отраженных сигналов. Однако, в большинстве случаев излучение и прием акустических колебаний осуществляется с помощью одной и той же приемо-излучающей акустической антенны.
Импульсный генератор служит для создания мощных импульсов электрических колебаний, имеющий заданную длительность, частоту заполнения, мощность, которые затем преобразуются излучающей акустической антенной в акустические импульсы.
Приемо-усилительное устройство служит для усиления слабых эхосигналов до уровня, необходимого для нормальной работы регистрирующих устройств.
Коммутатор приема – передачи необходим в том случае, если излучение и прием акустических колебаний осуществляется одна и та же акустическая антенна. При излучении коммутатор подключает акустическую антенну к выходу импульсного генератора, а во время приема – ко входу приемо-усилительного устройства.
К устройствам отображения информации относятся: самописец; электронный индикатор; указатель глубин (стробоскопический индикатор; цифровой индикатор; звуковой индикатор.
У гидролокаторов вводится электромеханическая система спуска-подъема антенны за обводы судна и система изменения углов наклона и поворота ПВУ.
В настоящее время наибольшее распространение в рыбопоисковой аппаратуре получили самописцы с линейной механической разверткой. Самописец состоит из двух основных узлов: механизм записи; лентопротяжное устройство. Основным рабочим узлом механизма записи является бесконечный ремень. На бесконечном ремне закреплено одно или несколько перьев, каждое из которых имеет в своем составе пишущий и токосъемный электроды. Бесконечный ремень вращается на двух шкивах со скоростью, соответствующей требуемому диапазону развертки. Токосъемный электрод скользит по токосъемной шине, а пишущий электрод соприкасается с бумагой. Запись, как правило, производится на электротермической бумаге. Механизм записи приводится в действие исполнительным электродвигателем. Запуск импульсного генератора осуществляется с помощью специальных контактов, которые периодически замыкаются при вращении бесконечного ремня. Для этой цели к ремню прикрепляется кулачки, магниты или другие детали, вызывающие замыкание контактов. Иногда замыкание контактов осуществляется непосредственно перьями самописца ("Прибой-101", "Сарган"). В этом случае необходимо устройство, задерживающее запуск импульсного генератора на время движения пера от момента замыкания контактов до момента прихода пера к нулевой отметке шкалы самописца. Многоперьевые самописцы – регистраторы без движущихся перьев с многочисленными неподвижными пишущими электродами (с гребенкой фиксированных перьев без кинематических систем перемещения пишущих электродов). Механизм записи этих устройств состоит из неподвижной планки, на которой крепятся изолированные друг от друга тонкие записывающие металлические электроды с постоянным расстоянием один от другого. Информация записывается только на электрохимической бумаге с более низким порогом чувствительности. Перемещение бумаги осуществляется малогабаритным бесшумным электродвигателем. При поступлении сигнала на любое перо гребенки в точке соприкосновения пера с бумагой появляется отметка эхо-сигнала. Достигнутая в настоящее время плотность составляет 2,5... 3 пера на 1 мм бумаги. В индикаторах с линейной системой развертки наблюдается прямолинейное перемещение электронного луча от одного края экрана электронно-лучевой трубки к другому с постоянной скоростью. По достижении конца экрана луч быстро перемещается обратно к исходной точке, причем на время обратного хода луча на модулятор трубки подается отрицательное запирающее напряжение, в результате чего обратный ход становится невидимым для наблюдателя. В большинстве случаев развертка начинается в момент излучения зондирующего импульса, а в моменты прихода эхосигналов происходит симметричное отклонение луча в направлении, перпендикулярном направлению развертки. Для того, чтобы скомпенсировать уменьшение яркости луча при его отклонении от оси развертки, в моменты прихода эхосигналов на модулятор трубки подается положительное напряжение, увеличивающее яркость свечения электронного луча. В радиальпо-круговом ЭИ пилообразный импульс блока развертки поступает на синусно-косинусный потенциометр СКП, который разворачивается по курсовому углу оси излучения акустической антенны. С выхода СКП два пилообразных импульса, амплитуды которых пропорциональны sin КУ и cos КУ, поступают на котушки продольную и поперечную. При этом движение луча по экрану ЭЛТ будет идти по углу относительно продольной оси, равному КУ. Развертка на экране ЭЛТ осуществляется от центра к периферии. Угол поворота электронного луча определяется суммарным магнитным полем двух катушек, по которым протекают токи, изменяющиеся по синусоидальному и косинусоидальному законам. Цветной индикаторы отображают цветным кодом интенсивность эхо-сигналов. Большинство имеет не более восьми цветных уровней.
Прибой Э - рабочая частота – 25,5кГц; импульсная мощность – 7,5кВт на 4 канала; длительность импульса – 0,5 мс, 1мс, 2,5мс; ширина диаграммы направленности – 5*10, 10*10, 20*10 град.; тип антенны – магнитострикционная; полоса иропускания приемного тракта – 0,5; 1,2; 2,4 кГц; коэффициент исиления по выходу на регистратор – 155дб; Прибой Г – рабочая частота – 19,7кГц; импульсная мощность – 7,5кВт на 3 канала; длительность импульса – 1мс, 5мс, 10мс; ширина диаграммы направленности – в вертикальной плоскости 14, в горизонтальной 9; 14; 28 град; полоса пропускания – 0,5; 1,2кГц.
Сарган Э – рабочая частота приемного тракта – 20, 135кГц; импульсная мощность – низкочастотном 3кВт, высокочастотном 2кВт; длительность импульса – на низкой частоте 0,5; 1; 3; 10мс; на высокой 0,1; 0,3; 1; 3мс; ширина диаграммы направленности антенны – низкая частота 14; высокая 14; 4 град; тип антенны – пьезокерамическая; полоса пропускания – на низкой частоте 3; 1; 0,33кГц ; на высокой 8; 3; 1кГц; коэффициент усиления по выходу на регистратор – 155,5дб. Сарган Г – рабочая частота – 20, 135кГц; импульсная мощность – низкочастотном 3кВт, высокочастотном 2кВт; длительность импульса – на низкой 1; 3; 10; 30мс; на высокой 0,1; 0,3; 1; 3мс; ширина диаграммы направленности антенны – низкая частота 14; высокая 14; 4 град; полоса пропускания приемного тракта – на низкой 1; 0,33кГц; на высокой 3; 1кГц.
Вопрос №105
.Гидролокатор «Прибой-101». Эксплуатация
Дальность обнаружения косяка, эквивалентного сфере радиусом 2 метра при скорости судна, равной 10 узлам, волнении до 6 баллов, хороших гидрометеорологических условиях и отсутствии чрезмерных шумовых помех не менее 3200 метров. Питание от сети переменного тока 220В±10% с частотой 50Гц±5%. Потребляемая мощность не более 2кВт (при подъёме и спуске антенны до 4,5 кВт). Рабочая частота 19,7кГц. Мощность – 3 канала по 7,5 кВт. Антенна 3-пакетная, магнитострикционная, КПД=33%. 3 диаграммыц направленности: 9°±2°, 14°±2°, 27°±2°. Спуск/подъём антенны » 1 мин, выдвигается на 1275 мм. ± 25 мм. Запись на ЭТБ 204мм.
Регистрация эхо-сигналов осуществляется на: ЭИ (Электронный индикатор); РС (Самописец); РС+ЭИ; АИ ( акустический индикатор). Бумага: ЭТБ (204мм; рабочий участок 180мм). Режимы поиска:1.Ручной (Сектор обзора 1800 относитн-но ДП судна); 2.Автоматический (Сектор:3000, по 150 на п/б и л/б; Две скорости поиска: 450 и 1200 в минуту)..Режим ЭИ: Линейный (амплитудная развертка) и Круговой (радиально-круговая с яркостной отметкой). Индикация эхо-сигналов осуществляется трех перьевым. самописцем и ЭИ (при их раздельной и совместной работе). Приемно-усилительный тракт имеет чувствительность хуже 1 мкВ; коэффициент усиления по выходе на самописец , менее 60-10 6, на ЭИ не менее 30-106 . ЭИ и самописец имеют следующие диапазоны: 0—200, О— 400, 0—800, 0—1600 и 0—3200 м; в самописце предусмотрена фазировка 0,5 Д; 1,0 Д и 1,5 Д. В режиме «лупа» ЭИ позволяет вести поиск по 20 и 80 м плавно в пределах всех диапазонов; приборная погрешность определения глубины цели на самописце не более 2 % максимальной дистанции диапазона, на ЭИ ошибка не превышает 5 %. В эхолоте предусмотрен контроль длительности импульсов в любом канале излучения генератора, напряжения питающего тока, коэффициента усиления на выходе на ЭИ и электрической мощности импульса. Длительность непрерывной работы эхолота не более 24 час; ресурс до первого капитального ремонта 8000 ч, срок службы 10 лет.
В состав гидролокатора входят: импульсный генератор (прибор 2А), ПВУ (прибор 1-1М), прибор управления, индикации и контроля (прибор 4-2), коммутатор приема — передачи и предварительный усилитель (прибор 13-1), прибор питания 20А, магнитный пускатель ПММ-1223. Особенности устройства приборов. Импульсный генератор (прибор 2А). Прибор 2А является трехканальным тиристорным генератором мощных импульсов. Рабочая частота генератора 19,7 кГц. Мощность импульса в каждом канале не менее 7,5 кВт. Предусмотрено уменьшение мощности импульса в 20 раз. Длительность излучаемых импульсов, переключаемая ступенчато, равна: 10,2; 5±1 и 10±2 мс. Акустическая антенна состоит из трех магнитострикционных никелевых пакетов. Рабочая частота антенны 19,7 кГц. Обмотки пакетов выведены на реле в приборе 2А с помощью которых обеспечивается коммутация диаграмм направленности (на уровне 0,7 по давлению): 9±2° (узкая); 14±2 (средняя); и .28 + 2°. (широкая). Электроакустический КПД антенны не менее 33%. Прибор управления, индикации и контроля (прибор 4-1) предназначен для управления запуском зондирующего импульса и антенной, индикации эхо-сигналов на самописце, ЭИ и на слух, а также для контроля основных параметров гилролокатора. Прибор в пультовом исполнении включает самописец, блок управления и индикации (БУИ), усилитель основной (УС-19), блоки питания и блок комбинированный(БК-4). На панели самописца размещены тумблер «сеть» //, кнопка «особые отметки» , тумблер включения ВАРУ, переключатель диапазонов самописца, переключатель «упреждение посылки» (фазировка), указатель фазировки, регуляторы усиления самописца , выключатель каскада «белая линия» и его регулятор. На панели БУИ размещены ступенчатый переключателе усиления (основного усилителя), переключатель диапазонов ЭИ, переключатель режима развертки, механизм съема глубины в обзорном диапазоне, ручка визира съема глубины, регулятор яркости ЭЛТ, регулятор усиления ЭИ, экран ЭИ, ручка установки задержки (в обзорном диапазоне при вращении ручки перемещается теневая метка, в поисковом плавно перемещается 20- или 80-метровый слой), шкала барабана задержки (отсчитывается глубина задержки в поисковом режиме), переключатель диаграммы направленности, переключатель длительности посылки, переключатель мощности импульса, переключатель с эхолота на сетной зонд ИГЭК-УМ, тумблер выбора угла наклона антенны, переключатель режима поиска (ручной, автоматический), переключатель скорости поиска, кнопки спуска и подъема антенны, тумблер разворота антенны при ручном поиске, ручка установки сектора поиска, указатель угла наклона антенны, шкала угла наклона антенныПрибор 1-1М предназначен для спуска-подъема акустической антенны с ее обтекателем и изменения ее углов разворота в вертикальной и горизонтальной плоскостях. Спуск-подъем акустической антенны осуществляется за время не более 1 минуты на дистанцию 127525мм с помощью асинхронного трехфазного электродвигателя. Прибор 13. Предназначен для коммутации импульсов посылки и предварительного их усиления. Режекторный фильтр подавляет частоту 19,7 кГц в случае совместной работы эхолота и гидролокатора. Коммутатор приема-передачи обеспечивает подключение антенны к импульсному генератору на момент посылки и к усилителю на время приема.
Прибор 13-11. Прибор предназначен для коммутации антенн эхолота и сетного зонда ИГЭК-УМ. При нажатии на клавишу (прибор 4-2) вместо третьего пакета антенны эхолота к приемно-передающему тракту подключается антенна сетного зонда ИГЭК-УМ. При этом все каналы генератора, кроме третьего, отключаются независимо от выбранной характеристики направленности. Магнитный пускатель ПММ-1223 служит для коммутации цепей питания двигателя спуска-подъема обтекателя с антенной.
Эксплуатация: Перед включением гидролокатора необходимо произвести внешний осмотр приборов, блоков, узлов, а также:1) убедиться, что все блоки приборов задвинуты и закреплены, а крышки клеммных ящиков надежно закрыты; 2) проверить наличие бумаги и перьев в самописце. При необходимости заправить бумагу в пишущий механизм и заменить перья; 3) проверить и при необходимости установить все органы управления в исходное положение, для чего включить или поставить: на самописце: тумблер ГВ-Р в положение «Р»; тумблер 7 в левое положение (см. рис. 74); тумблер 3 в левое положение; переключатель 9 в положение «3200»; переключатель 5 в положение «0,1; ручку 4 в положение «О» (минимальное усиление); ручку / в положение «О» (минимальная длительность); на блоке управления и индикации (БУИ) кнопки: «0,05» переключателя 9 «Мощность» (см. рис. 76); '«3200» переключателя 15 (см. рис. 76); «1» переключателя 11 (длительность импульса минимальная); «1» переключателя 7 (скорость поиска минимальная); правую переключателя 8 (ручной разворот антенны); крайнюю левую переключателя 10 (диаграмма направленности минимальная); левую переключателя 16 (режим развертки линейный); крайнюю левую переключателя 14 «Лупы»; «60» переключателя 13 (усиление минимальное); ручкой 12 шкалу задержки установить на отсчет 20 м; ручки 19 и 21 вывести в крайнее левое положение; на панели контроля поставить переключатели 7, 6, 10, 2 в крайнее левое положение (см. рис. 77); 4) включить гидролокатор в режим работы с самописцем, для чего: переключатель 6 на панели контроля поставить в верхнее положение. При этом загорается индикаторная лампа «~220 В»; тумблер 7 на самописце поставить в правое положение (см. рис. 74); переключателем 9 выбрать необходимый диапазон поиска. При необходимости переключателем 5 можно увеличить диапазон просмотра на 0,5; 1 и 1,5 включенного диапазона без изменения масштаба регистрации; ручкой 4 отрегулировать необходимое усиление эхо-сигналов. При этом необходимо помнить, что чрезмерная контрастность записи ведет к прожигу бумаги и порче столика самописца; переключателем И отрегулировать скорость протяжки бумаги (см. рис. 75). Во избежание поломки механизма протяжки необходимо переключать скорость протяжки плавно и
только при включенном двигателе пишущего механизма; ручкой 10 попробовать протянуть бумагу вручную; тумблером 3 включить схему «Белая линия» (см. рис. 74); ручкой 2 отрегулировать порог срабатывания схемы; нажав кнопку 6, убедиться, что перо прочерчивает на бумаге штрих одинаковой интенсивности по всей ее ширине. Если интенсивность записи неодинаковая или запись прерывается, необходимо отрегулировать нажим перьев на бумагу или натяжение ремня пишущего механизма; поставив переключатель 5 в положение «0,3-->, убедиться, что запись производится тремя перьями;
Вопрос №106
Гидролокатор "Сарган". Эксплуатация. Fраб=20кГц (НЧ), 136кГц (ВЧ). Гидролокация рыбных косяков, эквивалентных R=2м при скорости хода судна до 10 узлов и волнении до 6 баллов – до 1500м на НЧ и до 500м на ВЧ. Питание – судовая сеть 3-х фазного тока 220В, 50Гц или постоянный ток через электромагнитный преобразователь. Предусмотрено подключение ИГЭК-УМ. Длительность импульсов на ВЧ – 0,1; 0,3; 1,0; 3,0 мс, на НЧ – 1,3; 10; 30 мс. ПВУ выдвигается на 900 мм. Сектор поиска – КУ=210. Наклон антенны – 5-90. Антенна построена на 2-х частотных пьезокерамических преобразователях. Углы направленности на уровне давления 0,7 равны 4 - ВЧ – узкая, 14 - широкая; на НЧ - 14. Запись на ЭТБ. Запись эхосигналов: обычная; с белой линией; с контурной линией; с автоматическим изменением контрастности.. Поворот антенны: автоматический поиск = 1600 относительно ДП (10 и 30 в сек.) ручной поиск = 2100 относительно ДП (30 и 300 в сек.). Гидролокатор состоит из: генератора (прибор 2), ПВУ ( прибор 1-1), акустической антенны, прибора управления индикации, контроля и сигнализации ( прибор 4-1), коммутатора приема-передач (прибор 13). Прибор 2 является импульсным двухчастотным генератором. В его состав входят блоки: ГТ-7 генератор тиристорный низкочастотный; ГНП- генератор напряжения полупроводниковый (транзисторный) высокочастотный; БК клок комбинированный, включающий в себя задающие задающие генераторы НЧ и ВЧ, а также модуляторы. Прибор 4-1 является пультом управления. В его состав входят: РС, БУС, ЭИ, АИ, УС-60 блок основного усиления эхо-сигналов, БП-70 и БП-71блоки питания, обеспечивающие питание прибора 4-1. У гидролокатора отсутсвуют навигационный режим работы и все связанные с ним устройства, по сравнению с эхолотом. Прибор 13 служит для коммутации антенны при излучении и приеме и для предварительного усиления эхо-сигналов. В состав прибора входят: субблок К, содержащий элементы коммутации гидроакустической антенны с излучения на прием и обратно; субблоки УС-67, УС-68, являющиеся предварительными усилителями эхо-сигналов на низкой и высокой частотах; в УС-67, УС-68 входят контрольные генераторы Г для проверки работоспособности тракта приема. Прибор 13 производит подключение взамен эхолотной антенны в режиме «Контроль трала» антенну прибора ИГЭК-УМ. Прибор 1-1 является гидролокационной антенной. В состав входят двигатель и кинематика спуска-подъема антенны, двигатели и кинематика наклона и разворота антенны, датчики системы индикации положения антенны, выдвижные штоки, сальниковая система уплотнения, обтекатель и акустический преобразоварель. Акустическая антенна гидролокатора построена на двухчастотных пьезокерамических преобразователях.
Эксплуатация комплекса Сарган: Эксплуатация гидролокатора. В процессе эксплуатации гидролокатора можно выделить три основных этапа: подготовка к включению, включение и проверка работоспособности прибора; управление работой гидролокатора в различных режимах; выключение гидролокатора. Работу с гидролокатором рекомендуется проводить в такой последовательности. Перед включением гидролокатора необходимо убедиться в наличии бумаги в самописце (блок РС-1). При необходимости заправить бумагу. Проверить и при необходимости установить все органы управления в исходное положение, для чего включить или нажать кнопки: левую крайнюю переключателя «Сеть» (см. рис. 55 и 56); левую крайнюю переключателя «Мощность»; левую крайнюю (минимальная длительность) переключателя «Длительность»; «1200» переключателя «Диапазон»; «О» переключателя «Фазировка»; «60» переключателя «Ослабление»; левую крайнюю переключателя «Режим записи»; левую крайнюю переключателя «ВАРУ»; среднюю переключателя «Режим»; правую крайнюю переключателя «Лупа»; левую крайнюю переключателя «Шкала»; среднюю переключателя «Развертка»; переключатель «Контроль» в положение «Откл.» (под панелью блока БУС-1); тумблер «Подсветка» в положение «Откл.» (под панелью блока БУС-1). Ручку «Подсветка» установить в среднее положение, «Выбор участка — лупа» и «Усиление» — в левое положение. Остальные органы управления могут находиться в любом положении. Включить выключатель судовой сети, убедиться в наличии питающего напряжения по горящей лампе « | » на передней панели блока БУС-1. Включить гидролокатор, для чего нажать среднюю кнопку переключателя «Сеть». Открыть переднюю панель блока БУС-1 и с помощью системы встроенного контроля проверить наличие питающих напряжений по измерительному прибору «Контроль напряжений», расположенному на панели контроля блока БУС-1, для чего, поочередно нажимая кнопки «+3», «+6,3», «+12,6», «—12,6», «+27», «—27 нет», «—220 В», убедиться в том, что при каждом измерении стрелка прибора находится между делениями шкалы (0,6... 0,8) в пределах красного сектора. В темное время суток тумблером «Подсветка» (на панели контроля) включить освещение шкал, бумаги и символов органов управления. Яркость освещения отрегулировать соответствующей ручкой. Включить самописец левой крайней кнопкой переключателя «Индикация». Нажать кнопку «Особые отметки» на панели самописца и проверить наличие и качество записи оперативной отметки. Если записи нет или она неровная и прерывистая, необходимо отрегулировать нажим перьев и натяжение ремня. Длина пера (5 .. . 6 мм) регулируется путем вытягивания его из трубки перодержателя; при чрезмерной длине пера часть его можно отрезать. Нажим пера регулируется путем изменения числа витков пружины перодержателя, натяжение ремня — изменением положения верхнего ведомого шкива относительно положения ведущего шкива с помощью регулировочного винта, установленного на кронштейне пишущего механизма. Для доступа к винту необходимо, ослабив стопорные болты, выдвинуть самописец из корпуса прибора. Нажав кнопку «0,1» или «1,0», переключить «Мощность» и, вращая ручку «Усиление» на панели самописца, добиться записи зондирующего импульса (нулевой помехи) на всех диапазонах работы. Диапазоны работы включаются кнопками «1200», «600», «300», «150» переключателя «Диапазон». Верхний срез штриха нулевой помехи при записи должен совпадать с нулевым делением шкалы на всех диапазонах. Если это условие не выполняется, необходимо добиться этого путем вращения осей переменных резисторов 52, 53, 54 и 55 (на рис. 55 не показаны) соответственно на диапазонах 0 ... 150, 0... 300, 0 ... 600 и 0... 1200 м субблока С при открытой панели самописца. После проверки работы самописца органы управления необходимо установить в исходное положение. Включить электронный индикатор правой крайней кнопкой переключателя «Индикация» и проверить положение начала линии развертки относительно нулевого деления шкалы. Смещение начала развертки должно быть не более 2 мм. При необходимости установить начало развертки у нулевого деления шкалы вращением оси переменного резистора «Установка «О», «Линейная развертка». Регулировка амплитуды развертки осуществляется вращением оси резисторов «Амплитуда обзора», «Линейная развертка». Опустить антенну, нажав кратковременно правую кнопку «Антенна», проконтролировать начало и окончание спуска по подсветке символов над кнопками. Лампочка, подсвечивающая левый символ, должна погаснуть при нажатии правой кнопки (начало спуска). Лампочка, подсвечивающая правый символ, должна загореться при окончании спуска. Установить сектор поиска 250... 270° ручкой «Установка сектора поиска», нажать крайнюю левую кнопку переключателя «Режим», кнопку «А|» переключателя «Поиск», левую кнопку переключателя «Развертка» и кнопку «300» переключателя «Диапазон». Проверить положение линии развертки при работе индикатора в круговом режиме. Смещение начала развертки относительно нулевой отметки шкалы не должно превышать 2 мм. Если это условие не выполняется, произвести регулировку вращением осей резисторов «-«-»-, \ », «Центровка». Поднять антенну, для чего кратковременно нажать левую кнопку; проконтролировать начало и окончание подъема по подсветке обоих символов. Лампочка, подсвечивающая правый символ, должна погаснуть при нажатии левой кнопки (начало подъема), подсвечивающая левый символ должна загореться по окончании подъема. Нажать среднюю кнопку переключателя «Развертка» и проверить электрическую мощность ренератрра и коэффициент усиления усилительного тракта по .-выходу на электронный индикатор. Об их величинах можно судить по амплитуде сигнала на ЭЛТ индикатора. При номинальных мощности я коэффициенте усиления изображение сигнала на ЭЛТ должно находиться между вертикальными красными рисками шкалы (допускается изменение амплитуды не более ±30%). При пониженной мощности амплитуда сигнала должна быть 25±10 мм.
Вопрос №108
Эксплуатация сетного зонда с кабельным каналом связи. Сетной зонд ИГЭК – УМ. Краткие тактико-технические данные. ИГЭК-УМ (измеритель глубины эхолотный кабельный универсальный модернизированный) относится к сетным зондам с кабельной связью и может подключаться к приборам типа «Прибой-101», «Сарган», «Каль-мар-П», «Палтус-МП», «Омар» и «Судак» при работе разноглубинными и донными тралами. Акустическая антенна может погружаться с тралом на глубину до 1500 м.
Связь антенны с генератором и индикатором гидроакустического прибора на судне осуществляется при помощи одножильного бронированного кабеля «рыбацкого» (длиной 3600 м, диаметром 5,5 мм), КОБД-4 (длиной 2200 м, диаметром 8,4 мм), КПКО-2 или КОБД-ФМ-2 (длиной 3600 м, диаметром 6,2 мм). При отдаче ваеров кабель сматывается с барабана лебедки со скоростью до 4 м/с, выборка кабеля проводится со скоростью до 2 м/с. Акустическая антенна подключается к эхолоту или гидролокатору взамен соответствующей судовой антенны.
Устройство приборов. В состав сетного зонда ИГЭК-УМ входят акустическая антенна, переключающее устройство, пульт управления и кабельная лебедка.
Акустическая антенна сетного зонда. Эта антенна является магнитострикционным стержневым преобразователем 8 (показан пунктиром), который устанавливается в корпусе 9 из стеклопластика, закрываемого с тыльной стороны крышкой 10. Обмотка антенны выведена на герметичный разъем 12, в ответную часть которого заделан конец кабеля связи 2.
П ереключающее
устройство:
предназначено для коммутации акустических
антенн сетного зонда и судового
рыбопоискового прибора. Коммутация
осуществляется переключателем, имеющим
два положения: “судно” и “трал”. Ниже
выведен ручной регулятор – усиления
сетного зонда, расположен на корпусе.
Пульт управления
электроприводом кабельной лебедки:
Передняя
крышка откидная
(на ней
помешена инструкция по эксплуатации).
На панель вынесены контрольная лампа
“сеть”, кнопочный выключатель “подбирать
медленно”, кнопочный выключатель
“стоп”, двухпозиционный тумблер
“заторможено” и ” расторможено”,
четыре кнопочных выключателя с
соответсвующими контрольными лампами.
Кабельная
лебедка.
Предназначена для отдачи и выборки
кабеля связи. Это однобарабанная лебедка
с электромеханическим приводом. При
отдаче и выборке трала, а также во время
траления электропривод работает в
автоматическом режиме, поддерживая
определенное натяжение, заданное
соответствующими выключателями
на пульте
управления.
ереключающее
устройство:
предназначено для коммутации акустических
антенн сетного зонда и судового
рыбопоискового прибора. Коммутация
осуществляется переключателем, имеющим
два положения: “судно” и “трал”. Ниже
выведен ручной регулятор – усиления
сетного зонда, расположен на корпусе.
Пульт управления
электроприводом кабельной лебедки:
Передняя
крышка откидная
(на ней
помешена инструкция по эксплуатации).
На панель вынесены контрольная лампа
“сеть”, кнопочный выключатель “подбирать
медленно”, кнопочный выключатель
“стоп”, двухпозиционный тумблер
“заторможено” и ” расторможено”,
четыре кнопочных выключателя с
соответсвующими контрольными лампами.
Кабельная
лебедка.
Предназначена для отдачи и выборки
кабеля связи. Это однобарабанная лебедка
с электромеханическим приводом. При
отдаче и выборке трала, а также во время
траления электропривод работает в
автоматическом режиме, поддерживая
определенное натяжение, заданное
соответствующими выключателями
на пульте
управления.
Основные вопросы эксплуатации зонда. Акустическая антенна устанавливается на верхней или нижней (реже) подборе трала. К середине подборы подвязывается штанга 7. К проушинам привязывается уздечка 6 с зажимом (кабеля) 5. Кроме того, к подборе крепятся две пожилины 1 и 11 (3-4м), концы которых пришиваются к сетному полотну 3. На пожилины укладывается антенна, корпус которой крепится к штанге и пожилинам. Свободная часть кабеля связи 4 пропускается через зажим и крепится при помощи разъема 12 к антенне. Управление кабельной лебедкой на судах кормового траления сводится к следующему. Для проводки кабеля на рабочую палубу и присоединения его к тралу тумблер ставится в положение «расторможено»: кабель на нужную длину вытягивают с барабана вручную. Затем тумблер переводится в положение «заторможено» и нажатием на кнопку «подбирать медленно» выбирается слабина кабеля. При отдаче трала нажимают на одну из четырех кнопочных выключателей (кнопка1) и режим работы лебедки переводится на автоматический. В момент окончания травления ваеров и при тралении с длиной ваеров 700-800м нажимают на одну из четырех кнопочных выключателей (кнопка 2). Один из четырех кнопочных выключателей (кнопка 3) используется при выборке ваеров длиной свыше 1200м. На один из четырех кнопочных выключателей (кнопка 4) нажимают при выборке ваеров длиной более 1400-1500м при сильном боковом течении. При подходе траловых досок к судну при выборке трала нажимают на кнопку 1 независимо от того, какой кнопочный выключатель 2, 3 или 4 был включен до этого. В момент выхода подборы трала на рабочую палубу тумблер устанавливается в положение “расторможено” . Виды повреждения кабеля и его ремонт.1.Обрыв кабеля. 2.Нарушение изоляции (трещины) – приводят к частичному или полному замыканию кабеля. Нарушенная изоляция кабеля измеряется мегомметром. Если сопротивление меньше 1 МОм, кабель подлежит ремонту. Если очень мало (10 кОм), - то наблюдается короткое замыкание. Его надо найти и локализовать. Для этого отключается нагрузка (антенна), а генератор работает и на кабель надевается катушка индуктивности с телефонами (наушниками). В поврежденном месте мы услышим работу генератора. 3.При работе броня раскручивается, нагрузка (натяжение) падает на жилу и она рвется.(ИГ работает, а антенна не дергается). А) К концам кабеля подключается мегомметр. Если он покажет огромное сопротивление, значит – обрыв. Можно найти обрыв методом емкостей, представив оба куска кабеля, как конденсаторы. Б ) Весь кабель разрубываем пополам. Один из кусков можно использовать дальше. Ремонт кабеля. 1. Подобно ремонту троса. Одну жилу одного конца кабеля разматываем и на ее место вплетаем жилу другого (1 – 2 м). Восстанавливается прочность и диаметр, но занимает очень много времени. 2. Соединение с помощью соединительных муфт: Восстанавливаем центральную жилу и изоляцию, а потом одевают кольца и специальные полумуфты.
Вопрос №109
Рыбопоисковый эхолот «Прибой – 101»,устройство и эксплуатация. Тактико-эксплуатационные данные. Эхолот рассчитан на обнаружение и индикацию рыбных скоплений, (соответствующих эквивалентной сфере Я = 0,1 м), на глубинах до 1200 м. Индикация эхо-сигналов осуществляется трех перьевым. самописцем и ЭИ (при их раздельной и совместной работе).
Приемно-усилительный тракт имеет чувствительность хуже 1 мкВ; коэффициент усиления по выходе на самописец , менее 60-10 6, на ЭИ не менее 30-106
ЭИ и самописец имеют следующие диапазоны: 0—200, О— 400, 0—800, 0—1600 и 0—3200 м; в самописце предусмотрена фазировка 0,5 Д; 1,0 Д и 1,5 Д. В режиме «лупа» ЭИ позволяет вести поиск по 20 и 80 м плавно в пределах всех диапазонов; приборная погрешность определения глубины цели на самописце не более 2 % максимальной дистанции диапазона, на ЭИ ошибка не превышает 5 %. В эхолоте предусмотрен контроль длительности импульсов в любом канале излучения генератора, напряжения питающего тока, коэффициента усиления на выходе на ЭИ и электрической мощности импульса.
Эхолот питается от сети переменного тока напряжением 220 В ± 10 % и частотой 50 Гц ±5 %.
Длительность непрерывной работы эхолота не более 24 час; ресурс до первого капитального ремонта 8000 ч, срок службы 10 лет.
В состав эхолота входят импульсный генератор (прибор 2Б) акустическая антенна со стабилизатором (прибор 1-2), звукопрозрачная мембрана, прибор управления, индикации и контроля (прибор 4-2), коммутатор приема — передачи и предварительный усилитель (прибор 13), а также коммутатор эхолот —сетной зонд (прибор 13-П). • Особенности устройства приборов. Импульсный генератор (прибор 2Б). Прибор 2Б является четрехканальным тиристорным генератором мощных импульсов. Рабочая частота генератора 25,5 кГц. Мощность импульса в каждом канале не менее 7,5 кВт. Предусмотрено уменьшение мощности импульса в 20 раз. Длительность излучаемых импульсов, переключаемая ступенчато, равна: 0,5 + 0,1; 1±0,2 и 2,5±0,5 мс (идентичен прибору 2А в гидролокаторе «Прибой-101»). Акустическая антенна состоит из четырех магнитострикционных никелевых пакетов. Рабочая, .частота антенны 25,5 кГц. Обмотки пакетов выведены на реле в приборе 2Б с помощью которых обеспечивается коммутация диаграмм направленности (на уровне 0,7 по давлению): 5±2° (узкая); 10±2 (средняя); и .20 + 2°. (широкая). Электроакустический КПД антенны не менее 30%.
На панели самописца размещены тумблер «сеть» //, кнопка «особые отметки» , тумблер включения ВАРУ, переключатель диапазонов самописца, переключатель «упреждение посылки» (фазировка), указатель фазировки, регуляторы усиления самописца , выключатель каскада «белая линия» и его регулятор. На панели БУИ размещены ступенчатый переключателе усиления (основного усилителя), переключатель диапазонов ЭИ, переключатель режима развертки, механизм съема глубины в обзорном диапазоне, ручка визира съема глубины, регулятор яркости ЭЛТ, регулятор усиления ЭИ, экран ЭИ, ручка установки задержки (в обзорном диапазоне при вращении ручки перемещается теневая метка, в поисковом плавно перемещается 20- или 80-метровый слой), шкала барабана задержки (отсчитывается глубина задержки в поисковом режиме), переключатель диаграммы направленности, переключатель длительности посылки, переключатель мощности импульса, переключатель с эхолота на сетной зонд ИГЭК-УМ. • Панель контроля эхолота отличается от соответствующей панели гидролокатора отсутствием элементов, связанных со звуковой индикацией, и розетки на 24 В.
Прибор 13. Предназначен для коммутации импульсов посылки и предварительного их усиления. Он идентичен прибору 13-1 в гидролокаторе «Прибой-101» и отличается от него лишь тем, что настроен на рабочую частоту 25,5 кГц. Режекторный фильтр подавляет частоту 19,7 кГц в случае совместной работы эхолота и гидролокатора.
Прибор 13-Н. Прибор предназначен для коммутации антенн эхолота и сетного зонда ИГЭК-УМ. При нажатии на клавишу (прибор 4-2) вместо третьего пакета антенны эхолота к приемно-передающему тракту подключается антенна сетного зонда ИГЭК-УМ. При этом все каналы генератора, кроме третьего, отключаются независимо от выбранной характеристики направленности.
Возможна совместная работа эхолота и ИГЭК-УМ, для чего необходимо сетной зонд подключить к третьему каналу генератора.
Для совместной работы эхолота с ИГЭК-УМ нажимают клавиши (0,05) ряда и ряда ИГЭК-УМ. При этом мощность импульса с третьего канала генератора уменьшается в 20 раз. Работать с сетным зондом на полную мощность запрещается.
Эксплуатация эхолота «Прибой-101»: Особенности конструкции и эксплуатации эхолота «Прибой-101». Эхолот «Прибой-101» обеспечивает обнаружение и регистрацию рыбных скоплений на глубинах не менее 1200 м при скорости судна до 10 уз и волнении моря до 6 баллов. Самописец и электронный индикатор могут работать в автономном и совмещенном режимах. Рабочая частота эхолота 25,5 кГц. Генератор эхолота имеет четыре канала, мощность каждого не менее 7,5 кВ-А. Предусмотрено снижение мощности в 20 раз. Ширина характеристики направленности на уровне 0,7 по давлению: узкая — 5°*10°; средняя — 10°*10° и широкая — 20°*10°; длительность импульсов излучения 0,5; 1 и 2,5 мс. Полоса пропускания усилительного тракта 0,5; 1,2 и 2,4 кГц. Остальные тактико-технические характеристики такие же, как у гидролокатора. В состав комплекта эхолота входят приборы:1-2 — антенное устройство с пассивной стабилизацией антенны в горизонтальной плоскости до 2° при качке; килевой — ±6,3°; бортовой — ±22,5°. Стабилизация антенны осуществляется с помощью поплавка и деталей шарнирной подвески относительно двух взаимно перпендикулярных осей вращения. антенна состоит из четырех никелевых магнитострикционных пакетов с КПД не менее 30 %; 2-Б — четырехканальный тиристорный генератор импульсов; 4-2 — основной пульт управления эхолотом;13 — коммутатор импульсов посылки и предварительный усилитель эхо-сигналов; 13-11 — коммутатор антенн эхолота и сетевого зонда игэк-ум. Пользоваться органами управления, регулировки и настройки эхолота можно в режимах: с самописцем, электронным индикатором и совместном (аналогично пользованию гидролокатором). При работе эхолота с системой ИГЭК-УМ необходимо включить кнопку «0,05» переключателя и кнопку ряда ИГЭК-УМ. Порядок включения остальных органов управления при работе с системой ИГЭК аналогичен работе с самописцем и электронным индикатором. При проверке работоспособности эхолота с помощью системы встроенного контроля вместо кнопки «20» переключателя, как это делалось в гидролокаторе, необходимо нажимать левую крайнюю.
Перед включением гидролокатора необходимо произвести внешний осмотр приборов, блоков, узлов, а также: 1) убедиться, что все блоки приборов задвинуты и закреплены, а крышки клеммных ящиков надежно закрыты; 2) проверить наличие бумаги и перьев в самописце. При необходимости заправить бумагу в пишущий механизм и заменить перья; 3) проверить и при необходимости установить все органы уп-правления в исходное положение, для чего включить или поставить: на самописце: тумблер ГВ-Р в положение «Р»; тумблер 7 в левое положение (см. рис. 74); тумблер 3 в левое положение; переключатель 9 в положение «3200»; переключатель 5 в положение «0,Ь; ручку 4 в положение «О» (минимальное усиление); ручку / в положение «О» (минимальная длительность); на блоке управления и индикации (БУИ) кнопки: «0,05» переключателя 9 «Мощность» (см. рис. 76); '«3200» переключателя 15 (см. рис. 76); «1» переключателя 11 (длительность импульса минимальная); «1» переключателя 7 (скорость поиска минимальная); правую переключателя 8 (ручной разворот антенны); крайнюю левую переключателя 10 (диаграмма направленности минимальная); левую переключателя 16 (режим развертки линейный); крайнюю левую переключателя 14 «Лупы»; «60» переключателя 13 (усиление минимальное); ручкой 12 шкалу задержки установить на отсчет 20 м; ручки 19 и 21 вывести в крайнее левое положение; на панели контроля поставить переключатели 7, 6, 10, 2 в крайнее левое положение (см. рис. 77); 4) включить гидролокатор в режим работы с самописцем.
Вопрос №110
СКОЛ-1500 —это бескабельный траловый зонд с акустическим каналом связи, по которому на судно передается информация о положении трала и промысловой обстановке в его зоне. Информация передается на судно направленной передающей антенной в виде частотно-модулированных сигналов. Эффективность работы СКОЛ-1500 определяется ее оптимальными возможностями: расстояние от верхней подборы трала до поверхности воды до 600 м, а до грунта — до 400 м; вертикальное раскрытие трала от 3 до 60 м; температуру воды на глубине хода трала от минус 3 до плюс 27 °С. наличие рыбных скоплений в зоне действия эхолотных антенн на расстоянии 600—1000 м.
Сбор и передача такой информации возможны при следующих условиях: волнение на море до 6 баллов; скорости судна до 6 уз и циркуляции до 20 °; расстоянии от подводного блока до приемной буксируемой антенны не более 3 км, а до антенны в выдвижном устройстве — не более 2000 м; глубине погружения до 1500 м.
Основные технические характеристики: Рабочая частотаэхолотных датчиков 48 кГц при хар-ке направленности 38°на уровне 0,7 по давлению; частота в канале связи 28—30 кГц; мертвая зона 2,5 м, разрешающая способность 1 м; погрешность измерения температуры ±0,6, а расстояния— 1-1,5%; время непрерывной работы подводного блока 9 ч; время спуска (подъема) буксируемого устройства 30 с. Длина вытравленного кабель – троса при использовании БПУ составляет 55-60м. Спуск антенны ПВУ на расстояние 0,6м при автоматическом управлении производится за 30с. Хар–ка направленности антенн канала связи на уровне 0,7 по давлению для антенн: излучающей 33°, приемных БПУ 34°, ПВУ 36°
В состав системы входят: измерительно-передающее устройство (ИПУ); буксируемое приемное устройство (БПУ); приемное выдвижное устройство (ПВУ); выносной блок питания (ВБП); блок подавления записи посылок (ПЗП); пульт управления лебедкой (УЛ); прибор регистрации и сигнализации (PC); прибор зарядки аккумуляторов (ЗА); лебедка.
Измерительно-передающее устройство. ИПУ является основным прибором системы. Оно предназначено для сбора информации в зоне трала и передачи ее по акустическому каналу связи в виде частотно модулированных колебаний на судно: две эхолотные антенны для сбора информации в верхнем и нижнем направлениях от подборы трала; антенна связи (для передачи информации на судно); герморазъем для подключения выносного блока питания; гидровыключатель; преобразователь температуры; Электронная часть прибора – измернительный блок – выполнена на пяти печаиных платах в виде субблоков: генератора эхолотного (для формирования зондирующих импульсов); генератора связи (для формирования частотно-модулированных колебаний); усилителя эхолотного (для усиления и преобразования сигналов); блока температуры и питания (пркдназначен для контроля за степенью разряженности аккумуляторов, стабилизации напряжения питания блоков прибора ИПУ и преобразованияинформации о температурево временной интервал); блок управления и синхронизации ( предназначен для выработки импульсов синхронизации прибора ИП и прибора PC, а также для управления работой прибора ИП. Блок состоит из задающего генератора, цепочки делительной частоты, дешифратора и каскадов согласования. В качестве задающего применен кварцевый генератор на транзисторах. Для формирования временных интервалов используются делители частоты на триггерах). Питание ИПУ от аккумуляторов (18 штук) напряжением 24 В. Время непрерывной работы ИПУ от заряженных блоков питания не менее 9 ч, от выносного блока питания не менее 27ч.
Акустические антенны (две эхолотные антенны и антенна связи) выполнены одинаково и предназначены для излучения, приема и преобразования сигналов. Пьезокерамические антенны (или вибраторы) установлены герметично в корпусе прибора и рассчитаны на погружение до 1500 м. Антенна связи закреплена на корпусе под наклоном к горизонту. Угол наклона можно дискретно изменять (вручную) через 7,5° от 5 до 50°.
Работа с системой. Высокая работоспособность аппаратуры, ее долговечность зависят от правильной эксплуатации, своевременности и качества проводимых профилактических и ремонтных работ. Эффективность применения аппаратуры на промысле зависит от знания обслуживающим персоналом ее технических возможностей и от полноты их использования.
Перед установкой ИПУ на сетное полотно необходимо проверить его работоспособность на палубе, для чего: направить эхолотные антенны на какие-либо плоские отражатели, расположенные на расстоянии 3 ... 5 м от антенн; сориентировать приемную антенну БПУ на антенну связи ИПУ; включить прибор PC, установив переключатель прибора УЛ в положение «Вкл.» и нажав кнопку 15 «Вкл.» прибора PC; установить режим работы кнопками 14 «СКОЛ» и 16 «Вкл. антенна БПУ», включив диапазоны «Вверх» и «Вниз» 50 м; для включения ИПУ необходимо ввинтить винт М4 в отверстие шайбы гидровыключателя; на верхнем и нижнем полях эхограммы прибора PC при этом должны писаться параллельные линии на расстоянии примерно 2 ... 2,5 м друг от друга в масштабе шкалы.
Для удобства и оперативности проверки работоспособности ИПУ в воздухе в ЗИПе имеется антеннз, которую можно использовать вместо антенны БПУ. Антенна из ЗИПа подключается к контактам /, 2 разъемз Х23 прибора PC. При этом должны быть нажата кнопка 16 «Вкл. антенна БПУ».
Проверить напряжение аккумуляторного блока ИПУ, для чего нужно отвинтить заднюю крышку ИПУ и извлечь аккумуляторный блок. Если при проверке нзпряжение нз клеммах окажется ниже 21 В, заменить блок питания ззряженным. Время непрерывной работы ИПУ от заряженного автономного блока питзния не менее 9 ч. При работе ИПУ без дополнительного выносного блока питания отверстие для его подключения должно быть закрыто заглушкой.
В режиме придонных тралений у каменистых грунтов целесо-обрззно уменьшить чувствительность приемного тракта нижнего направления для улучшения разрешающей способности по дистанции и возможности буксировки трала в непосредственной близости от грунта. Для уменьшения чувствительности следует извлечь блок И из ИПУ, снять перемычку между контактами Х7 и Х8 блока ГЭ и вместо нее впаять резистор из ЗИПа 10... 15 кОм. Это в 3... 4 раза уменьшит коэффициент усиления сигнала по нижнему направлению. При работе на больших глубинах (длина ваеров более 2000 м) и повышенном уровне помех для улучшения качества записи можно увеличить излучаемую антенной связи мощность. Для этого необходимо вместо вывода 6 выходного трансформатора Т2 блока ГС задействовать вывод 5. При этом токопотребление ИПУ возрастет на 30... 40%, однако уменьшится время непрерывной работы.
При работе с небольшой длиной ваеров и малым уровнем шумов можно уменьшить излучаемую антенной связи мощность, убрав перемычку между выводами 7 и 8 блока ГС. Установить угол наклона а антенны связи в зависимости от глубины траления Я и длины вытравленных ваеров L. Закрепить ИПУ на верхней подборе трала. Угол наклона можно приближенно рассчитать по формуле sina.=H/L.
При использовании БПУ в качестве приемного устройства следует убедиться, что серьга для крепления кабель-троса к паравану находится в центре оси подвеса. В зависимости от борта буксировки паравана необходимо переставить груз на крыло, направленное на этот борт. Угол наклона антенны установить максимальным на глубинах свыше 300 м и минимальным на глубинах менее 300 м.
При использовании ПВУ спуск и подъем антенны осуществляется с прибора PC кнопками «f» и «|» после включения кнопки 16 «Вкл. антенна ПВУ». Наклон антенны ПВУ осуществляется с помощью гайки на выдвижной трубе, для этого ее нужно предварительно опустить вниз. Величина угла наклона (10... 20°) выбирается в зависимости от глубины хода трала. Разворот антенны производится вручную; после разворота ручку необходимо поставить в гнездо.
При работе с прибором PC открыть переднюю крышку и вынуть валик. Вставить рулон бумаги между прижимными шайбами, закрепленными на кронштейнах с тыльной стороны столика. Пропустить бумагу под шкалой. Поставить столик на место. Отвести прижимной валик 18 от протягивающего 17. Пропустить бумагу между валиками и заправить ее в прорезь наматывающего валика 19, Произвести подмотку бумаги рифленой шайбой по направлению красной стрелки. Нажав стопорящую планку, возвратить прижимной валик в рабочее положение.
Включить прибор PC, нажав левую кнопку переключателя сети. Проверить работу развертки прибора PC, нажав кнопку «Контроль» (при этом должны быть нажаты кнопки режимов работы «СКОЛ» или «Расширенный диапазон»).
Контрастность записи регулируется вращением потенциометра «Контрастность». В режиме «Контроль» проверяются развертки температуры, и верхнего и нижнего направлений (рис. 105). В рабочий режим прибор PC включается кнопкой «Работа». При спуске трала ИПУ включается автоматически на глубине 7... 15 м. После вытравливания ваеров необходимо заглубить БПУ, нажав кнопку «Спуск» на пульте УЛ или лебедкой вытравив 20... 40 м кабель-троса. Количество вытравленного кабель-троса определяется глубиной хода трала и качеством записи на регистраторе. Перед подъемом трала необходимо поднять БПУ, нажав кнопку «Подъем» на лебедке или пульте УЛ.
При работе с ПВУ опустить приемную антенну, нажав кнопку «|» на приборе PC или кнопку «Спуск» на ПВУ. При полностью опущенной антенне кнопка «f» перестает подсвечиваться. Подъем антенны после окончания работы производится нажатием кнопки «f» на приборе PC или кнопки «Подъем» на выдвижном устройстве. При полностью поднятой антенне подсветка кнопки «|» прекращается.
Выбрать режим работы системы, нажав одну из кнопок: «СКОЛ», «Расширенный диапазон» или «Совмещенный».
.
Вопрос №111
Геометрия корпуса судна Теоретический чертеж Ввиду сложности формы обводы корпуса задаются графически в виде теоретического чертежа. На теоретическом чертеже изображены проекции на главные взаимно перпендикулярные плоскости линии пересечения теоретической поверхности корпуса с плоскостями, параллельными главным плоскостям. Под теоретической поверхностью понимают внутреннюю поверхность обшивки корпуса (без учета толщины обшивки и выступающих частей). В качестве главных плоскостей принимают: - диаметральную плоскость (ДП) - вертикальную продольную плоскость, делящую корпус судна на две симметричные части - правую (правый борт) и левую (левый борт); - плоскость мидель шпангоута (®) - вертикальную поперечную плоскость, проходящую по середине длины судна и делящую корпус на носовую и кормовую части; - основную плоскость (ОП) - горизонтальную плоскость, проходящую через нижнюю точку теоретической поверхности корпуса судна в плоскости мидель-шпангоута. Линии пересечения теоретической поверхности корпуса с плоскостями параллельным ДП называют батоксами, с плоскостями параллельными ОП - теоретическими ватерлиниями (ВЛ), с плоскостями, параллельными плоскости мидель-шпангоута - теоретическими шпангоутами. Линии пересечения ОП с ДП и ОП с плоскостью мидель-шпангоута дают продольную и поперечную основные линии. Пересечение ДП с корпусом образуют линию киля, форштевня, ахтерштевня и верхней палубы.
Совокупность проекций батоксов, теоретических ватерлиний и шпангоутов на ДП называется боком, на ОП - полуширотой, на плоскость мидель - шпангоута - корпусом. Эти три вида и составляют теоретический чертеж судна. Каждое сечение проектируется на одну из плоскостей в своем истинном виде, а на две другие в виде прямых линий. Например, на виде «бок» в истинном виде представлены батоксы, а теоретические шпангоуты и ватерлинии в виде прямых. Число теоретических шпангоутов, как правило, принимается равными 11 или 21, которые образуют соответственно 10 или 20 теоретических шпаций. Линии пересечения диаметральной плоскости с вертикальными поперечными плоскостями, проходящими через крайнюю носовую точку КВЛ и точку ее пересечения с осью баллера, называется соответственно носовым (НП) и кормовым (КП) перпендикулярами. Теоретический чертеж применяется при проведении ремонтных работ по корпусу, при доковании судна.
Различают две группы главных размерений корпуса судна в зависимости от того, связаны они или не связаны с положением ватерлинии:
1) размеры, не связанные с положением судна относительно поверхности воды (чисто конструктивные размеры);
2) размеры, связанные с этим положением и характеризующие деление корпуса судна на надводную и подводную части.
Для приближенной и сравнительной оценки мореходных качеств судов используются соотношения главных размерений и коэффициенты полноты.
L/B (относительное удлинение) - определяет ходкость судна; B/d - характеризует остойчивость и ходкость судна; D/d - определяет плавучесть и остойчивость судна на больших углах наклонения. Основными безразмерными коэффициентами полноты корпуса судна являются:
а = S
/LB
- коэффициент
полноты ватерлинии - отношение
площади ватерлинии к площади прямоугольника
со сторонами L
и В (рис 12, а); части V
к объему параллелепипеда со сторонами
L,
В и d
;
![]() =
=
![]() - коэффициент
продольной полноты - отношение
объема подводной части судии V
к объему цилиндра, имеющего в основании
погруженную площадь мидель-шпангоута
to
и длину L
;
- коэффициент
продольной полноты - отношение
объема подводной части судии V
к объему цилиндра, имеющего в основании
погруженную площадь мидель-шпангоута
to
и длину L
;![]() - коэффициент
вертикальной
полноты - отношение
объема подводной части судна к объему
цилиндра, имеющего в основании площадь
ватерлинии S
и высоту d
;
- коэффициент
вертикальной
полноты - отношение
объема подводной части судна к объему
цилиндра, имеющего в основании площадь
ватерлинии S
и высоту d
;![]() /Bd
- коэффициент
полноты мидель-шпангоута ~ отношение
погруженной площади мидель-шпангоута
со к площади прямоугольника со
сторонами В и d.
/Bd
- коэффициент
полноты мидель-шпангоута ~ отношение
погруженной площади мидель-шпангоута
со к площади прямоугольника со
сторонами В и d.![]() =
V
/LBd
- коэффициент
общей полноты - отношение
объемного водоизмещения к объему
параллелепипеда, построенного на главных
размерениях судна.
=
V
/LBd
- коэффициент
общей полноты - отношение
объемного водоизмещения к объему
параллелепипеда, построенного на главных
размерениях судна.
Посадкой называется положение судна относительно спокойной поверхности воды. Положение действующей ватерлинии относительно корпуса, а значит, и посадку судна в общем случае определяют три параметрами: - d - средняя осадка (осадка на миделе); - Df - дифферент (разность осадок носом и кормой);
- 0 - угол крена - наклонение судна в плоскости мидель-шпангоута.
Угол дифферента
связан с дифферентом Df
![]() При малом
значении угла
При малом
значении угла
![]() можно считать, что
можно считать, что
![]() ,
тогда
,
тогда
![]()
При принятой системе координат положительным считается дифферент на нос(Ч* >0), а угол крена - на правый борт (0 >0). возможны следующие случаи посадки: A. Судно плавает прямо на ровный киль. (0 = О, = 0). В этом случае посадка характеризуется только одним параметром -средней осадкой d.
Б. Судно плавает
пря но сдиферентом (0 = О,
![]() 0).
В этом случае посадка
0).
В этом случае посадка
![]()
![]()
B. Судно плавает
на ровный киль но с креном (
=
0,![]() ).
В этом случае посадка характеризуется
двумя параметрами - средней осадкой d
и углом крена
).
В этом случае посадка характеризуется
двумя параметрами - средней осадкой d
и углом крена
![]() .
.
Г. Общий случай посадки (судно плавает с креном и дифферентом). Посадка характеризуется двумя параметрами в одном из следующих сочетаний:
- средней осадкой d и углом дифферента - средней осадкой d и дифферентом Df; - осадками носом dн и кормой dK, измеряемые соответственно на носовом и комовом перпендикулярах.
Для контроля за
осадкой судна при изменении его нагрузки,
а также для определения его дифферента
используют марки
углубления. Марки
углубления наносят на обоих бортах
судна в носу и корме, а также в районе
мидель-шпангоута.
Поэтому
для их получения необходимо значения
осадок снятые с марок углублений
исправить с помощью специальной
шкалы.
При отсутствии
указанной шкалы осадки на перпендикулярах
определяются по формулам:
![]() ,
где
,
где
![]() и
и
![]() -
отстояние от основной плоскости нижней
кромки киля в плоскостях носовых и
кормовых марок углубления), l1
и 12
- отстояние носовых и кормовых марок
углубления от плоскости мидель-шпангоута.
-
отстояние от основной плоскости нижней
кромки киля в плоскостях носовых и
кормовых марок углубления), l1
и 12
- отстояние носовых и кормовых марок
углубления от плоскости мидель-шпангоута.
Вопрос №112
Мореходные и эксплуатационные качества судна Судно, являясь сложным инженерным сооружением, предназначенным для передвижения по воде, характеризуется мореходными и эксплуатационными качествами. Мореходные качества определяют конструктивное совершенство судна. К ним относятся: плавучесть, остойчивость, непотопляемость, мореходность, ходкость и управляемость судна. Плавучестью называется способность судна плавать в состоянии равновесия в заданном положении относительно поверхности воды при заданной нагрузке. Остойчивостью называется способность судна противодействовать силам, отклоняющим ее от положения равновесия, и возвращаться в первоначальное равновесное положение после прекращения действия этих сил. Различают поперечную остойчивость, которая проявляется при боковых наклонениях — крене, и продольную остойчивость, проявляющуюся при килевых наклонениях — дифференте. Непотопляемостью называется способность судна после затопления части помещений сохранять достаточную плавучесть и остойчивость.
Мореходностью называется способность судна противостоять воздействию ветра и морского волнения. Ходкость- способность судна перемещаться с заданной скоростью. Управляемостью называется способность судна следовать по заданному курсу или менять его в соответствии с желанием судоводителя. Устойчивость на курсе — способность корабля удерживать заданное направление движения. Поворотливость — способность корабля быстро изменять направление своего движения в зависимости от положения руля или под действием машин, или от того и другого вместе. Плавность качки — свойство корабля медленно и плавно переходить при качке из одного крайнего положения в другое. При отсутствии плавности качка характеризуется стремительностью. Стремительность качки ухудшает ходкость корабля, затрудняет работу команды, вредно отражается на прочности всей корабельной конструкции и ухудшает условия использования оружия военных кораблей. В настоящее время на ряде кораблей применяются успокоители качки. Живучесть — способность корабля противостоять боевым и аварийным повреждениям, восстанавливать и поддерживать свою боеспособность. Рыскливость — изменение кораблем курса при руле, находящемся в диаметральной плоскости. Причинами рыскливости корабля могут быть ветер, волна, течение, неодинаковые обороты машин и пр. Корабль, не обладающий устойчивостью на курсе и требующий постоянной перекладки руля для приведения его на курс, называется рыскливым. Увальчивость — свойство корабля с высокими носовыми надстройками уклоняться с курса под ветер при боковом ветре. Эксплуатационные качества определяют транспортные возможности и экономические показатели судна. К ним относятся: водоизмещение, грузоподъемность, грузовместимость, скорость, дальность и автономность плавания. Под водоизмещением понимают массу судна Δ(т), равную массе, вытесненной им воды. Водоизмещение может также измеряться в единицах объема v(m3 ) и единицах веса Р(Кн). В мерном случае имеют дело с так называемым объемным водоизмещением, равным объему вытесненной судном воды, во втором - весовым водоизмещением, равным весу вытесненной судном воды. Водоизмещением порожнего судна называется водоизмещение, которое слагается из суммы веса конструкций построенного судна (корпус, механизмы, судовые устройства и системы), а также веса запасов топлива, масла в системе запуска двигателя. Твердый балласт, укладываемый на некоторых судах, также включается в порожнее водоизмещение. Грузоподъемностью называют вес различного рода грузов, которые может перевезти судно. Различают чистую грузоподъемность судна и дедвейт. Чистая грузоподъемность судна - масса груза, который при имеющихся запасах и экипаже может быть принят на судно до погружения его по соответствующую грузовую марку. Дедвейт (полная грузоподъемность) (DW) - масса перевозимого груза, судовых запасов и экипажа с багажом. Полное водоизмещение судна: Δ = Δ0+DW, где Δ - полное водоизмещение (т); Δ0- порожнее водоизмещение (т); DW- дедвейт (т). Грузовместимость - суммарный объем всех грузовых помещений, измеряется в кубических метрах. Различают грузовместимость по штучному и сыпучему грузу. Зерновая вместимость (по сыпучему грузу) - равна теоретическому объему грузовых помещений за вычетом объема набора и других конструкций, находящихся внутри помещений (пиллерсы, шахты, трапы, трубы, подкрепления и т.д.). Обычно она составляет 94-г95% теоретического объема грузового помещения. Киповая вместимость (вместимость по штучному грузу) - на 8 + 10% меньше зерновой вместимости, так как в нее не включают пространство между шпангоутами, бимсами и стойками переборок, которое не может быть использовано для размещения ящиков, бочек, кип хлопка и пр. Для определения платы, взимаемой с судна за пользование причалами, каналами, за лоцманские услуги и статистического учета флота специальные правила устанавливают вместимость судна, измеряемую в регистровых тоннах. Регистровая тонна - единица объема, равная 2,83 м3 . В практике эксплуатации флота пользуются понятиями валовой и чистой вместимости судна измеряемой в регистровых тоннах. Данные, полученные в результате обмера судна, заносятся в его мерительное свидетельство и в списки (регистровые книги) судов. Валовая вместимость (брутто) судна - полный объем помещений корпуса и закрытых надстроек, за исключением объемов отсеков второго дна, цистерн водяного балласта, а также объемов некоторых служебных помещений и постов, расположенных на верхней палубе и выше (штурманские и рулевые рубки, радиорубки, камбуза, санузлов экипажа, световых люков, шахт и пр.). Чистая вместимость (нетто) представляет собой условный объем помещений судна, служащих для перевозки грузов или пассажиров, т.е. характеризует объем толькокоммерчески эксплуатируемых помещений судна. Скорость - эксплуатационное качество судна, определяющее быстроту транспортных операций. Для морских судов ее измеряют в узлах. Узел - единица скорости, равная одной морской миле в час (1,852 км/час, или 0,514 м/с). Дальность плавания - расстояние, которое может пройти судно без пополнения запасов топлива, питательной воды и масла. Дальность плавания определяется, как правило, запасом топлива. Автономность - длительность пребывания судна в рейсе без пополнения запасов топлива, провизии и пресной воды, необходимых для жизни и нормальной деятельности, находящихся на судне людей. Автономность судов ограничивается запасом пресной воды. Мореходные качества судна, их зависимость от типа и архитектуры. Ходкостью судна называется его способность преодолевать сопротивление наружной среды (воды и воздуха) и перемещаться с требуемой скоростью. Мощность, необходимая для преодоления силы сопротивления воды, будет равна секундной работе этой силы, т. e.EPS=RV75 где R — сопротивление воды движению судна, кгс; V— скорость судна, м/с. Данное выражение определяет полезную или эффективную буксировочную мощность судна. Эффективная мощность, затрачиваемая на преодоление сопротивления воды, является частью полной мощности главных двигателе И (SHP). Потеря мощности от двигателя к гребному винту или другому движителю учитывается соответствующими коэффициентами полезного действия. При одном и том же числе оборотов винта скорость заднего хода всегда меньше скорости переднего. Эго объясняется тормозящим действием струи от гребного винта на подводную часть корпуса судна, а также его конструкцией. Поэтому полное сопротивление корпуса при установившемся режиме заднего хода на 20 — 40 % больше, чем при установившемся режиме переднего. Что касается самого гребного, то его лопасти рассчитаны на эффективную работу на передний ход. Упор винта на задний ход меньше чем на передний. При маневрировании всегда необходимо учитывать особенности работы силовой установки в режиме реверсирования. На современных судах в основном установлены дизельные пли турбинные двигатели. На дизеле реверс можно осуществить сравнительно быстро, а его мощность на заднем ходу составляет 75 -80 % переднего хода. Турбины менее приспособлены для маневренного режима, и для развития оборотов заднего хода требуется значительная затрата времени — от 30 с и более. Мощность турбинной установки на заднем ходу coставляет около 60% мощности переднего хода. Двигатель посредством движителя сообщает судну определенную скорость. Обычно различают построечную, техническую, эксплуатационную и экономичную скорость судна Построечной называется скорость переднего хода судна, развиваема на сдаточных испытаниях после постройки. Испытания приводятся на специальных мерных линиях с соблюдением по возможности определенных условий. Качество проведенных испытаний во многом определяется оборудованием мерной линии, а также ее глубиной, которая должна исключать влияние мелководья. В соответствии с инструкцией, рекомендованной Х11 Международной конференцией оптовых бассейнов, минимальную глубину на мерной линии нужно определять наибольшим значением, определяемым по одному из двух уравнений: Ггл 3ВТ; Ггл 0.28V, где В – ширина судна (м), Т – наибольшая осадка судна (м), V – наибольшая возможная скорость (узлы). Техническои называется скорость переднего хода, устанавливаемая в различные периоды эксплуатации исходя из технического состояния машиной установки судна. Эксплуатационной называется средняя скорость, развиваемая судном за ходовое время определенного рейса. При благоприятных условиях эта скорость равна технической, но, как правило, она меньше вследствие влияния ветра и волнения моря. Экономичной называется скорость, при которой расход топлива на одну милю пройденного расстояния будет наименьшим. Потери скорости при ветре и волнении для каждого типа судна неодинаковы и зависят от формы подводной части корпуса, конструкции надстроек, мощности главных двигателей. С увеличением скорости судна возникают сложные волновые движения самой жидкости, обусловленные действием сил тяжести.
Вопрос № 114
Плавучесть судна. Условия плавучести. Уравнения равновесия судна. Требования Регистра.
Плавучесть – способность судна держаться в определённом положении относительно поверхности воды. В центре тяжести судна G (XG, YG, ZG), приложена сила веса Р, действующая вертикально вниз, в центре величины (центре тяжести погруженного объёма) судна С (XC, YC, ZC) приложена сила плавучести, действующая вертикально вверх. Для равновесия этих сил (плавающего судна) эти силы должны быть равны по модулю и лежать на одной вертикали.

 ,
при ==0
,
при ==0
Запас плавучести – масса дополнительного груза, который судно может принять до полного затопления, или непроницаемый для воды надводный объём судна выше грузовой WL, включающий помещения, ограниченные верхней палубой, а также водонепроницаемые надстройки и рубки. Необходимый запас плавучести обеспечивается назначением судну минимальной высоты надводного борта на основании Международной Конвенции о Грузовой Марке .
Вопрос №115
Конструктивное обеспечение непотопляемости. Под непотопляемостью судна принимается его способность оставаться на плаву после затопления части помещений (отсеков) и сохранять остойчивость, достаточную хотя бы для ограниченного использования его по назначению. Непотопляемость судна обеспечивается: конструктивными мерами при постройке, организационно-техническими в процессе эксплуатации, оперативными действиями (борьбой за непотопляемость) после получения пробоины. Основное конструктивное средство обеспечения непотопляемости – разделение корпуса на отсеки водонепроницаемыми переборками, палубами и платформами, которые ограничивают количество воды, поступающей внутрь корпуса, и этим способствуют сохранению аварийного запаса плавучести и остойчивости в допустимых пределах. С 1979г. по Правилам Регистра СССР в качестве более объективной характеристики уровня обеспечения непотопляемости принята вероятность его сохранения на плаву после получения пробоины. Наряду с этим продолжает существовать наглядный и физически более ощутимый прежний критерий – число отсеков, при затоплении которых судно не тонет и не опрокидывается (знаки 1, 2...в символе класса судна Регистра СССР). Знак 1 присваивается транспортным судам длиной более 90м с ледовым классом УЛА и УЛ, накатные более 170м, промысловые более 100м, ледоколы более 50м, буксиры более более 40м, спасательные, атомные, а также некоторые другие специальные суда. Знак 2 присваивается большим пассажирским судам, транспортным судам категории УЛА длиной более 100м, промысловым более 100м, ледоколам более 75м, атомным, судам специального назначения длиной более 160м. Для конструктивного обеспечения непотопляемости на каждом судне должно быть установленно определенное число поперечных водонепроницаемых переборок. Кроме того, по требованиям иного порядка на судах устанавливаются продольные переборки. Влияние их на непотопляемость неоднозначно: с одной стороны, они вызывают несимметричное затопление и опасный аварийный крен, а с другой – их отсутствие может заметно снизить остойчивость из-за большой площади свободной поверхности влившейся воды. Компромиссное решение состоит в устройстве управляемых и автоматических перетоков. Система деления судна на отсеки должна отвечать требованию: плавучесть при аварии должна утрачиваться ранее остойчивости, т.е. судно должно тонуть не опрокидываясь. Этому же требованию должны быть подчинены меры, предпринимаемые экипажем в процессе эксплуатации при борьбе за живучесть. Аварийная плавучесть считается неутраченной, если ватерлиния судна без крена не пересекает предельную линию погружения – условную границу, совпадающую с линией главной палубы (палубы переборок) у борта. Предельное состояние аварийной остойчивости ограничивается положительным значением метацентрической высоты (h0,05м) и аварийным углом крена (20 до и 12 после принятия мер спрямления), а также требованиями к диаграмме остойчивости (мах плечо не менее 0,1м, протяженность диаграммы не менее 30). При оценке аварийного состояния судна следует учитывать фактическое значение коэффициента проницаемости отсека, под которым понимается отношение объема влившейся воды к теоретическому объему затопленной части отсека.
Вопрос № 119
Влияние на остойчивость и непотопляемость затопления отсеков третьей категории. Отсек третьей категории – отсек, неполностью затопленный водой и сообщающийся с забортной водой. Затопление отсеков третьей категории возникает при наличии повреждения, создающего свободное сообщение воды в отсеке с забортной водой – обычно в результате столкновения или посадки судна на грунт, либо открытия или разрушения забортной арматуры. При затоплении отсека третьей категории при погружении судна вода беспрепятственно заполняет надводный объем отсека до уровня аварийной ватерлинии. Поэтому надводный объем отсека не может засчитываться в запас плавучести судна. Из плавучести исключается объем всего отсека. Прием воды в отсек создает дополнительный восстанавливающий момент между силами веса влившейся воды и равной ей дополнительной силе плавучести вошедшего в воду объема. Центр тяжести влившейся воды смещается в сторону наклонения, следовательно возникает дополнительный кренящий момент, уменьшающий восстанавливающий момент. Так как в отсек вливается значительно большее количество воды, чем в отсеки других категорий, то и отрицательное влияние на остойчивость больше.
Вопрос № 118
Определение посадки судна и остойчивости при приёмке и снятии больших грузов.
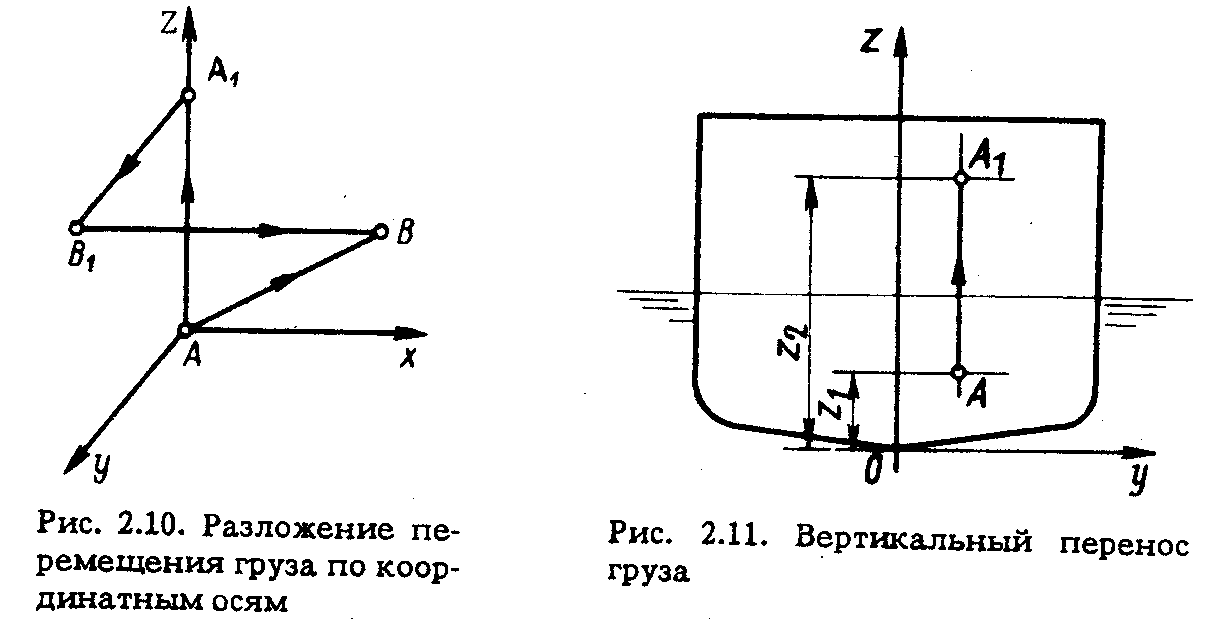
Влияние переноса твердых грузов на посадку и начальную остойчивость судна. Примем сначала допущение, что в исходном равновесном положении судно имеет посадку прямо и на ровный киль. Предположим далее, что в общем случае некоторый твердый груз массой т переносится на судне в произвольном направлении так, что его ЦТ перемещается из точки A (x1, y1, z1) в точку В (х2, у2, z2) так, как показано на рис. 2.10.
Для того, чтобы определить влияние такого переноса груза на посадку и начальную остойчивость судна, воспользуемся следующим методом исследования. Располагая в точке А начало вспомогательной координатной системы Axyz, разложим перемещение АВ на три перемещения в направлениях координатных осей и будем рассматривать сначала влияние вертикальной составляющей перемещения груза (в направлении оси Az), а затем влияние горизонтально-поперечной и горизонтально-продольной составляющих (в направлениях осей Ау и Ах).
Перемещение груза вдоль оси Oz (рис. 2.11) не создает момента, способного вызвать наклонение судна, и, следовательно, его посадка при таком перемещении не изменится, если начальная остойчивость останется положительной и судно будет по-прежнему находиться в состоянии устойчивого равновесия.
Приращения поперечной и продольной метацентрических высот определяем как суммы приращений их отдельных компонентов согласно формулам (2.7) и (2.8):
δh = δzm - δzg; δН = δzM - δzg. (2.24) При неизменной посадке судна δzm = δzм = 0, поэтому δh = δH = -δzg. (2.25)
Для определения приращения δzg аппликаты ЦТ судна может быть использована известная теорема теоретической механики: если в системе материальных тел одно из тел получит перемещение в каком-либо направлении, то ЦТ всей системы переместится в том же направлении, причем величины перемещений будут обратно пропорциональны массам тела и всей системы. Применительно к рассматриваемому случаю вертикального перемещения груза указанная теорема приводит к выражению δzg = (m/Δ)(z2-z1), (2.26) где Δ - .водоизмещение судна вместе с переносимым грузом; z1 и z2 -координаты ЦТ груза до и после переноса. Подставляя (2.26) в (2.25), получаем δh=δH= - (m/Δ)(z2-z1), (2.27)
Выражение (2.27) показывает, что перенос груза по вертикали вниз (z2 < z1) приводит к увеличению остойчивости судна, а перенос по вертикали вверх - к ее уменьшению. При горизонтально-поперечном переносе груза (в направлении оси Оу) из точки А1(у1) в точку Вг(у2) начальная остойчивость не изменится, так как ни аппликата метацентра, ни аппликата ЦТ судна не получат приращений (рис. 2.12). Однако посадка судна изменится оно получит крен θ. Заметим, что перенос груза на расстояние А1В1 можно представить как снятие груза из точки A1 и прием такого же груза в точку В1 . Приложив к судну в этих точках две равные, но противоположно направленные силы р = mg, видим, что перенос груза приводит к образованию пары сил на плече (у2 - yt) cos θ. Момент этой пары сил, являющийся кренящим моментом, равен
MKp=p(y2-y1)cosθ. (2.38) Поскольку угол 6 предполагается малым, можно принять cos θ = 1, т. е. Мкр=р(у2-у1). (2.29)
Приравнивая (в равновесном наклонном положении судна) кренящий момент восстанавливающему
Мв =Р(h + δh)δ, находим (2.30) где δh - приращение начальной метацентрической высоты, являющееся следствием рассмотренного ранее влияния вертикальной составляющей перемещения груза.
При горизонтально-продольном переносе груза из точки B1(x1) в заданную точку В2(х2) (рис. 2.13) начальная остойчивость судна,
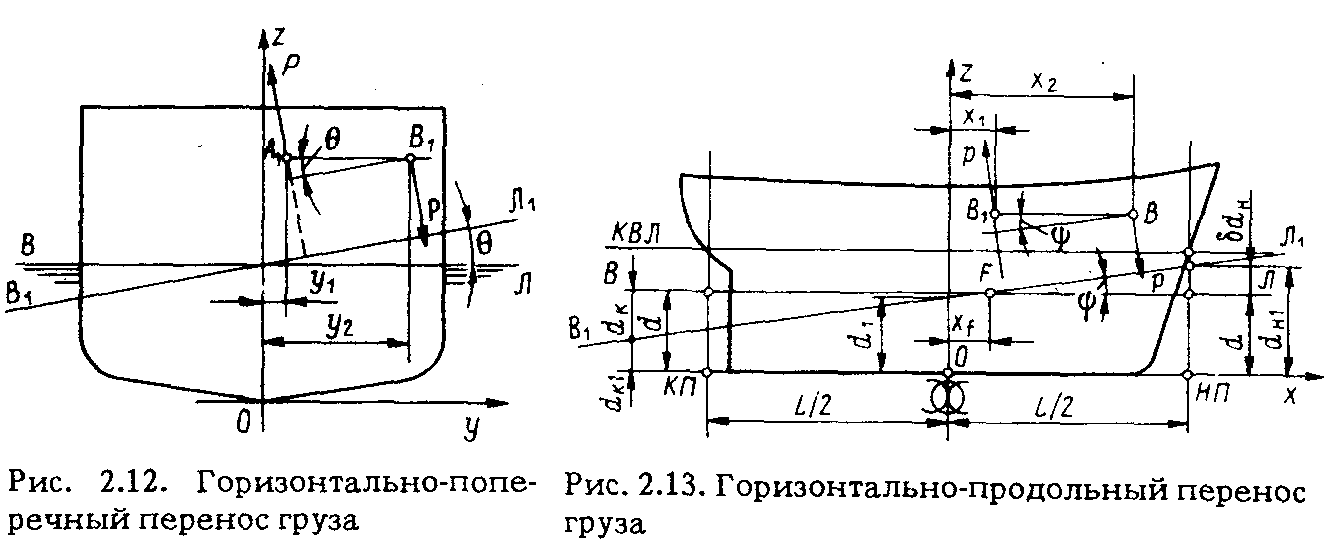
как и в предыдущем случае, не изменится, но возникнет дифферент судна, угол которого по аналогии может быть найден в соответствии с формулой
Ψ =р(х2-х1)/ Р(Н + δH) = т(х2-х1)/ Δ(H+δH) (2.31)
Практически важно знать не угол дифферента, который обычно весьма мал, а изменение осадок носом и кормой и дифферент судна.
Проведем новую ватерлинию равновесия B1Л1 под углом Ψ к первоначальной ватерлинии ВЛ. При малом угле Ψ можно считать, что ватерлинии ВЛ и B1Л1 как равнообъемные пересекутся по оси, проходящей через их общий ЦТ F (xf). Тогда новые осадки носом и кормой будут равны
dH l = d + (L/2 - хf)Ψ; dK l = d- (1/2 + хf)Ψ. (2.32)
Как было отмечено ранее, все полученные зависимости основаны на допущении, что судно до переноса груза сидело прямо и на ровный 'киль. Если же в действительности судно имело начальные (малые) углы крена и дифферента, то при определении новых углов крена и дифферента по формулам (2.30) и (2.31) в числители этих формул следует подставить алгебраические суммы моментов, возникающих в результате переноса груза, и моментов Phθ0 и РHΨ0, отвечающих начальным углам крена и дифферента. Выполнив это, получим
(2.33)
Формулы (2.33) показывают, что в этом случае даже при отсутствии перемещений груза в направлении осей Ох и Оу его перемещение
в направлении оси Oz приводит не только к изменению начальной остойчивости судна, но и к появлению дополнительных углов крена и дифферента
![]()