

Вопрос №1
Навигационный секстан: назначение, устройство, основные тактико-технические данные и выверки. Секстаном - называется угломерный инструмент, построенный на принципе отражательной схемы и предназначенный для измерения углов на подвижной основе. Название "секстан" связано с величиной его дуги лимба, равной приблизительно 1/6 окружности (по-латыни sextantis-шестая часть). Секстан служит для измерения высоты светила, т.е. вертикального угла между плоскостью горизонта и направлением на светило. Кроме вертикальных углов, секстаном можно измерять горизонтальные углы между направлениями на земные ориентиры (предметы) при определении места судна навигационными способами. При измерении секстаном вертикальных и горизонтальных углов один из предметов наблюдается прямовидимо, изображение же другого предмета наблюдатель видит после отражения от двух зеркал. Чтобы измерить угол, эти два изображения необходимо совместить.
Секстан состоит из металлической или пластмассовой рамы в форме сектора. На раме расположен лимб с градусными делениями, а по торцу дуги нарезана зубчатая рейка. На левом радиусе рамы укреплены неподвижное малое зеркало и светофильтры. На правом радиусе рамы имеется угольник с кольцом, служащий для крепления на ней астрономической трубы и подъемного механизма.На подвижном радиусе- алидаде крепится большое зеркало и на противоположном ее конце установлен винт с отсчетным барабаном, наружная поверхность которого имеет 60 минутных делений. Число градусов показывает индекс, нанесенный около выреза на алидаде. Минуты и десятые доли минуты отсчитываются на барабане. При вращении барабана алидада передвигается, что дает возможность точно совместить прямовидимое и отраженное изображения предметов. Точность измерения углов секстаном 0,1¢. На оборотной стороне рамы имеются ручка и две ножки. Измеряя высоту, нужно в поле зрения трубы секстана совместить светило (или края его диска) с линией видимого горизонта. Совмещение производят в вертикале светила. Установить индекс алидады на 0° и навести трубу на светило. Передвигая алидаду от себя, одновременно опустить секстан к горизонту так, чтобы дважды отраженное изображение светила оставалось все время в поле зрения трубы. Как только появиться прямовидимое изображение горизонта, приступить к точному визированию высоты.
В судовых условиях выполняют следующие выверки секстана: проверку положения трубы (для СНО-М и дневной СНО-Т) - перед плаванием, но не реже чем через 3 мес.; проверку перпендикулярности большого и малого зеркал (в указанной последовательности) к плоскости лимба не реже раза в неделю и при подозрении, что установка зеркал нарушена. Поправку индекса секстана необходимо определять каждый раз непосредственно до или после измерения высот светил. Подготовка секстана. Проверка параллельности оптической трубы (дневной или универсальной) плоскости лимба. Секстан устанавливают на горизонтальную поверхность. Алидада ставится на середину лимба, отфокусированная труба - на своё штатное место, а диоптры - на край лимба так, чтобы вертикальная плоскость, проходящая через них, была параллельна оси трубы. Прицеливаются диоптрами, на какой- то удалённый предмет (см. рис.) Если этот предмет располагается в поле зрения по вертикали(положение а) ось трубы параллельна плоскости лимба. Если же предмет смещён вверх или вниз (положение б и в), то ось трубы непараллельная плоскости лимба и её следует выправить, действуя винтами, крепящими трубу. Проверка перпендикулярности большого зеркала плоскости лимба. Секстан устанавливают на горизонтальную плоскость большим зеркалом к себе, алидаду на отсчёт лимба около 40°, диоптры - на края лимба так, чтобы их плоскости располагались по касательной к внутренней дуге лимба. Судоводитель должен видеть, помимо большого зеркала (справа), часть диоптра 5, установленного на 0°, а часть другого диоптра - отражённой в большом зеркале. При перпендикулярном зеркале верхние срезы диоптров будут представлять непрерывную линию (положение отражённого диоптра 4). Если же зеркало не перпендикулярно плоскости лимба, то срезы диоптров составят ступеньку (положения 1 и 3 , отражённого диоптра). Вращая регулировочный винт большого зеркала, добиваются положения 4 отражённого диоптра. Проверка перпендикулярности малого зеркала плоскости лимба. Секстан вооружается отфокусированной трубой. Алидада устанавливается на нуль по лимбу и барабану. Труба наводится на какой-то удалённый предмет (лучше светило). Вращая барабан, проводят дважды отражённое изображение предмета через прямовидимое. При перпендикулярном положении зеркала дважды отражённое изображение точно перекроет прямовидимое. В противном случае барабаном выводят дважды отражённое изображение предмета на одну горизонталь с прямовидимым и нижним регулировочным винтом малого зеркала совмещают оба изображения. Проверка параллельности зеркал (определение поправки индекса). При установке алидады на нуль по лимбу и барабану плоскости обоих зеркал должны быть параллельны. Угол их расхождения называется поправкой индекса: i = 360° - OC1 ( 1 ) Отсчёт погрешности индекса может быть получен одним из четырёх приёмов: по звезде, видимому горизонту, предмету, Солнцу. Методика определения поправки индекса первыми тремя приёмами одинакова. Секстан вооружается отфокусированной трубой. Алидада устанавливается на 0°. Труба наводится на выбранный объект. Вращением барабана дважды отражённое изображение объекта наблюдения совмещается с прямовидимым и снимается ОС1. Если индекс алидады смещён влево от нуля пункта делений лимба, то градусы записываются 360, 361° и т.д., если же вправо - то 359, 358°С и т.д. Поправка индекса с её знаком определяется по формуле (1). При определении поправки по Солнцу последовательно совмещают верхний и нижний края прямовидимого изображения Солнца с нижним и верхним краями дважды отражённого. Совместив верхний край прямовидимого изображения Солнца 2 с нижним краем дважды отражённого 3 , получают ОСi1. Совместив нижний край прямовидимого изображения с верхним краем дважды отражённого 1, получают ОСi2.
OCi = OCicp = (ОCi1 + OCi2) / 2; Поправка индекса вычисляется по формуле (1). R'e = (OCi2 – OCi1) /4 . ( 2 ).
Сравнивая полудиаметр Солнца, полученный по формуле 2, с полудиаметром, выбранным на дату наблюдения из МАЕ Re, контролируют правильность определения i, которая считается достоверной, если: R'e- Re £ 0.3' Если i > 5', её уменьшают. Для этого алидаду вновь устанавливают на нуль по лимбу и барабану и совмещают дважды отражённое изображение объекта наблюдений с прямовидимым верхним регулировочным винтом. После этого вновь производят установку малого зеркала перпендикулярно плоскости лимба и определяют остаточную поправку индекса одним из описанных приёмов.
Вопрос №2
Время. Организация службы времени на судне. Служба времени организуется на судне для судовождения и для нормальной жизни на судне. В службу времени входят: хронометр, палубные часы, судовые часы, секундомеры, хронометрический журнал, журнал сличения. Повседневная служба времени предусматривает: Ежедневный завод хронометров и палубных часов в одно и то же время; Ежедневное определение поправок хронометра в одно и то же время по радиосигналам точного времени и запись её в хронометрическом журнале; Сличение палубных часов с хронометром и запись его в журнал сличения; Определение суточного хода хронометра и его вариации. Перевод судовых часов при переходе из одного часового пояса в другой; Ежедневное согласование и регулирование всех часов; Отметки времени на ленте самописцев. Категорически запрещается разборка каких-либо измерителей времени. Ремонт – только в мастерских. Хронометр должен выдавать GMT с точностью до 0,5с. Судовые часы в радиорубке должны показывать киевское время с точностью до 6 сек; в штурманской и МКО – судовое время с точностью до 0,5 мин, остальные – до 1 мин. В судовождении используется три системы счета времени: звездное, истинное солнечное и среднее солнечное. Звездное время – промежуток времени, прошедший с момента верхней кульминации токи Овна до данного ее положения. Звездные сутки – промежуток времени между 2 последовательными верхними кульминациями точки Овна. S=t+α – основная ф-ла звездного времени; t - часовой угол светила в круговом счете; α - прямое восхождение; S - звездное время. Человек связывает счет времени с положением Солнца на небесном своде. Ежедневное запаздывание верхней кульминации центра истинного Солнца приводит к тому, что начало звездных суток будет приходиться на разное по освещенности поверхности Земли Солнцем время: 21.03 и истинные и звездные сутки начнутся в полдень, то 22.06 они начнутся в 6 ч по истинному солнечному времени, 23.09 в полночь, 22.12 в 18 ч. Предшествующих суток. Это неудобно, поэтому в повседневной жизни звездное время не используется. Вторая причина – неравенство истинных и звездных часов, минут, секунд. Истинное солнечное время – промежуток времени прошедший с момента верхней кульминации центра истинного Солнца до данного положения его на меридиане. Видимый годовой путь вокруг Земли Солнце совершает по эклиптике, а циферблат истинных часов – небесный экватор. Поэтому стрелкой этих часов является не сам центр истинного Солнца, а точка пересечения его меридиана с небесным экватором. Из сказанного выше следует, что стрелка истинных солнечных часов будет изо дня в день менять скорость своего движения по циферблату (небесному экватору). Такая неравномерность усугубляется еще и тем, что само истинное Солнце движется по эклиптике неравномерно. Поэтому истинное солнечное время не используется для нужд человека. Истинное Солнце заменяют условной точкой, движущейся по небесному экватору с постоянной скоростью, равной средней скорости движения истинного Солнца по эклиптике, в том же направлении что и истинное Солнце. Эта точка – среднее Солнце. Обязательное условие выбора среднего Солнца в перигее: λ© = α; где λ© - долгота истинного Солнца, α- прямое восхождение среднего Солнца. Перигей – точка эклиптики, ближайшая к Земле. Средним солнечным временем наз промежуток времени от нижней кульминации среднего Солнца до данного его положения. Средние солнечные сутки равны полному обороту Земли вокруг своей оси относительно среднего Солнца. Начало средних солнечных суток приходится в полночь, а в фундаментальной астрономии – в полдень. Такой счет времени принят в повседневной человеческой жизни и получил название гражданского времени. Связь между истинным солнечным и средним солнечным временем определяется уравнением времени η. η =t – t© = α© – α; знак уравнения времени считается положительным, если среднее Солнце опережает истинное. Из уравнения времени определяется не только значение, но и знак. Связь гражданского времени с часовым углом среднего Солнца: Т=t + 12ч(180˚). Также η=Твк - 12ч,
Для наблюдателей расположенных на разных меридианах гражданское время разное. Т.к. отсчет его ведется от меридиана наблюдателя. Также существует разновидность гражданского - гринвичское, местное, поясное и летнее время. Демаркационная линия времени – линия при пересечении которой при движении судна с Е на W дата пропускается.
Tм=Тгр±λEW
– местное время; Sм=Sгр±λEW
– местное время; Tп=Тгр±ΝEW
– поясное время. Служба времени на
судне организуется для обеспечения
нормальной жизни на судне. В СВ входят:
хронометр, палубные часы, судовые часы,
секундомер, хронометрический журнал
и журнал сличений. С В предусматривает:
1) ежедневный завод хронометров и
палубных часов; 2) ежедневное определение
поправок хронометра строго в одно и
тоже время по радиосигналам времени с
последующей записью в хронометрический
журнал; 3) ежедневное сличение палубных
часов с хронометром с записью в журнал
сличений; 4) ежедневное определение
суточного хода и его вариации; 5) перевод
судовых часов при переходе из одного
пояса в другой; 6) ежедневное согласование
часов штурманской рубке и в МО; Тритий
помощник капитана возглавляет и
организует службу времени.
Вопрос №3
ВИДИМОЕ СУТОЧНОЕ ДВИЖЕНИЕ СВЕТИЛ И СОПРОВОЖДАЮЩИЕ ЕГО ЯВЛЕНИЯ Наблюдая в течение нескольких часов за звездным небом, заметим, что созвездия, расположенные в восточной стороне небесного свода, поднимутся выше, а находящиеся на западе зайдут. Наблюдателю представляется, что весь небесный свод вместе со светилами вращается вокруг некоторой оси в направлении с востока на запад. Наблюдаемое движение светил в направлении с востока на запад является видимым, т. е. кажущимся. Его причиной на самом деле служит вращение Земли вокруг своей оси с запада на восток. В сферической астрономии принято, однако, рассматривать все явления так, как они представляются наблюдателю. Поэтому для удобства рассуждений будем считать Землю неподвижной, а небесные светила — вращающимися. Вместе с наблюдателем остаются неподвижными и связанными с ним линии и круги небесной сферы: отвесная линия, истинный горизонт с полуденной линией NS, ось мира, меридиан наблюдателя, первый вертикал и небесный экватор.
Видимое суточное движение светил происходит по небесным параллелям в направлении по часовой стрелке, если смотреть на сферу со стороны Северного полюса мира pn. В зависимости от соотношения широты наблюдателя ф и склонения д все светила при своем движении по параллелям будут проходить те или иные характерные положения. Кульминацией светила называется точка пересечения центром светила меридиана наблюдателя. Если светило находится на полуденной части меридиана наблюдателя, то его кульминация называется верхней, а если на полуночной, — нижней. Истинным восходом светила называется точка пересечения центром светила е-й части истинного горизонта, а истинным заходом — точка пересечения его W-й части. Следовательно, условием восхода и захода светил в данной широте является неравенство б < 90° — ф.
Особенности
видимого суточного движения светил для
наблюдателей на полюсах или экваторе.
Для наблюдателя,
находящегося на полюсе (ф = 90°), полюсы
мира PN
и ps
совпадают
с точками Z
и п, ось
мира — с отвесной линией, а экватор —
с истинным горизонтом. Наблюдателю
доступна только одна половина небесной
сферы. Наблюдатель не видит светил,
склонение которых разноименно с
широтой. В суточном движении светила
описывают круги, параллельные горизонту,
высоты светил не изменяются и равны
склонениям. Светила не имеют точек
кульминации, восхода и захода. Для
наблюдателей на экваторе (=
0°) полюсы мира pn
и PS
совпадают
с точками горизонта N
и S,
ось мира —
с полуденной линией, экватор — с
первым вертикалом. Здесь все светила
восходят и заходят. Параллели светил
перпендикулярны горизонту и делятся
пополам, т. е. время нахождения светил
над горизонтом и под ним одинаковое.Расчеты
Тс различных явлений:
1. Определение
времени кульминации cветил.
В ежедневных таблицах на правой странице
дается местное время на гринвичском
меридиане верхней и нижней кульминаций
Солнца и Луны на каждый день. Там же на
левой странице под колонкой суточных
эфемерид навигационных планет приведено
местное время кульминации планеты на
гринвичском меридиане на среднюю дату
разворота. Рассчитываем суточное
изменение
как разность двух моментов кульминаций
для восточных долгот из предшествующего
момента вычитаем настоящий момент, для
западных из последующего настоящий. По
вспомогательной таблице (приложение
1Б в МАЕ; поправка за долготу ) по аргументам
-долгота
и -разность
моментов выбираем поправку за долготу
Т.
Знак поправки одинаков со знаком .
Получаем местное время кульминации Тм.
Переводим местное время в судовое (через
Гринвич). ТкТ=Тмс=Тгр№=Тп+1или
2 часа=Тд=Тс. 1 час если часы идут по
декретному времени с 01.10 по 01.04, и 2 часа
с 01.04 по 01.10; где Тп – поясное время. Тд
– декретное время. 2.Определение
времени восхода и захода Солнца и Луны,
начала и конца сумерек.
В ежедневных таблицах МАЕ на правой
странице разворота приводятся моменты
явления Тт на среднюю дату трехсуточного
интервала. Момент явления выбирается
для широты, ближайшей меньшей к заданной
широте. В случае если заданная дата не
совпадает со средней, используя суточные
изменения необходимо рассчитать момент
явления на заданную дату. Для предыдущей
даты суточное изменение берется слева,
для последующей справа. Моменты начала
или конца сумерек выбираются на среднюю
дату без интерполяции. Здесь же находим
разность 1
(значение и знак) между моментом для
последующей большей табличной широты,
разность
между заданной широтой и меньшей
табличной широтой, а так же замечаем
величину табличного интервала широт
(2,5или
10),
между которыми производится
интерполирование. Из таблицы приложения
1 (А. Поправка за широту) по аргументам
и 1
для соответсвующего интервала широт
находим поправку Т
(с тем же знаком , что и 1).
Из таблицы приложения 1 (Б. Поправка за
долготу) по аргументам
и суточные изменения 2
находим поправку Т
(знак одинаков со знаком 2).
Суточные изменения приведены слева и
справа от моментов восхода и захода.
Если долгота восточная берем слева,
если западная справа. Знак суточных
изменений определяется в зависимости
от возрастания или убывания моментов
к предыдущим или последующим суткам.
При расчете начала сумерек поправкой
за долготу можно пренебречь. Прибавляем
со своими знаками найденные поправки
Т
, Т
к выбранному моменту Тт и получаем
местное вре6мя явления Тм. Приемом через
Гринвич переводят Тм в Тс. Тт
Т
Т
= Тм
![]() =Тгр
N
=Тгр
N![]() =
Тс
=
Тс
Вопрос №5
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ОДНОВРЕМЕННЫМ НАБЛЮДЕНИЯМ СВЕТИЛ
ОМС по одновременным наблюдениям двух светил.Порядок действий, 1. Измеряются серии по 3-5 высот каждого светила, причём на каждый отсчёт секстана OCi засекается момент времени по хронометру Tхрi с точностью до 1с, после чего определяется вероятнейшее (среднее) значение ОСср и среднее время измерений Tср.2. На момент второго измерения замечается судовое время Тс с точностью до 1м, счислимые координаты судна, ИК или ПУ, скорость, отсчёт лага, высота глаза наблюдателя е, температура воздуха и атмосферное давление.3. Рассчитать приближенное Тгр и гринвичскую дату по замеченному Тс и номеру часового пояса. 4. По средним моментам хронометра и его поправке получить точное Тгр наблюдений каждого светила. 5. С помощью МАЕ по Тгр наблюдений и с получить местные практические часовые углы, а также склонения светил.6. По формулам сферической тригонометрии с помощью таблиц ТВА-57, ВАС-58 рассчитать счислимые высоты и азимуты светил.7. Исправив средние ОС всеми поправками, получить обсервованные высоты светил. 8. Первую обсервованную высоту привести к зениту вторых наблюдений. 9. Рассчитать переносы. 10. Проложить линии положения на карте. 11.Полученные обсервованные координаты, невязку, Тс, и ОЛ записать в судовой журнап.
Способ определения места судна по одновременным наблюдениям двух светил отличается сравнительной простотой. Однако полученная по двум линиям положения обсервованная точка при наличии систематических ошибок не получается достаточно определенной.Чтобы получить более точную и надежную обсервацию, необходимо иметь еще одну линию положения, т. е. определить место судна no-наблюдениям трех светил. Важным преимуществом такого способа определения является возможность исключить из результатов обсервации систематические погрешности наблюдения. Для этого при подборе звезд по глобусу желательно выполнить требование, заключающееся в том, чтобы разность азимутов между каждой звездой была близка к 120°. Подобранные для наблюдений звезды Сг, С2, Ся (рис. 116, а) будут располагаться по всему горизонту. По возможности подбирают звезды с близкими по величине высотами (объектом наблюдения могут являться также планеты).
Подготовку к наблюдениям, сами наблюдения, вычисления и прокладку проводят в том же порядке, как и при определении места по двум светилам. Высоты первой и второй звезд обычно приводят к зениту третьих наблюдений. В этом случае судовое время и отсчет лага замечают при взятии средней по порядку высоты третьей звезды. Особенности способа определения места по трем светилам проявляются в анализе обсервации.
Так как в полученных трех линиях положения /—/, //—// и ///— /// будут присутствовать систематические и случайные погрешности, то при прокладке на карте или бумаге эти линии, как правило, не пе-
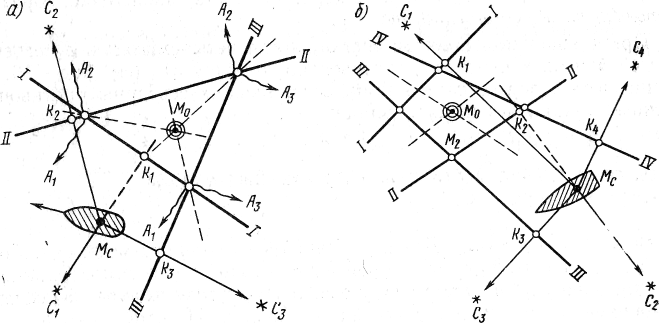
Рис. 116. Нахождение обсервованного места при определении по трем (а) и по четырем (б) звездам
ресекаются в одной точке. Образованный ими треугольник называется ложным треугольником или треугольником погрешностей. Задача судоводителя — отыскать наиболее вероятное место судна, т. е. такую обсервованную точку, которая ближе всего располагается к его действительному месту. Теоретические исследования показывают, что если попарные разности азимутов трех светил были равны или близки к 120°, то обсервованное место М0 (см. рис. 116, а), свободное от систематических ошибок, может приниматься внутри треугольника на пересечении его биссектрис.
Определение места судна по одновременным наблюдениям четырех светил C1 C2, С3, С4 (рис. 116, б) является еще более точным и надежным способом, при применении которого также оказывается возможным исключить влияние систематических погрешностей высот. Преимущество этого способа проявляется при условии правильного подбора светил для наблюдений. Звезды должны подбираться по всему горизонту, чтобы разность азимутов между соседними светилами была близкой к 90° (см. рис. 116, б). Высоты «противоположных» звезд должны быть по возможности близкими по значению. Подбор звезд делают заблаговременно по звездному глобусу. Объектом наблюдения могут быть также планеты, которые нужно нанести на глобус.
Наблюдения, вычисления и прокладку при определении по четырем светилам выполняют в обычном порядке. Высоты первых трех звезд приводят обычно к зениту четвертых наблюдений. Судовое время и отсчет лага в этом случае записывают при измерении средней по порядку высоты четвертой звезды. В результате вычислений получают элементы четырех линий положения, которые прокладывают на карте или бумаге. Под действием случайных и систематических ошибок четыре линии положения, как правило, не пересекаются в одной точке, образуя четырехугольник погрешностей.При правильном подборе светил, когда четырехугольник погрешностей близок к квадрату, обсервованную точку М0 (см. рис. 116, б) принимают в пересечении линий, соединяющих середины противоположных сторон четырехугольника.
Вопрос №6
Определение места судна по измерениям высот Солнца. Для получения обсервованного места судна необходимо нанести на карту не менее двух линий положения. Промежуток времени между двумя наблюдениями определяется необходимостью изменения азимута светила на 40-60. При различных условиях этот промежуток составляет от нескольких минут до 3-4 часов. При определении места судна по разновременным наблюдениям Солнца руководствуются следующим порядком работы. Подготовка к наблюдениям: выбрать время выхода на первые и вторые наблюдения, что особенно необходимо при плавании в малых и средних широтах; перед выходом на первые наблюдения подготовить секстан к измерениям высот Солнца, проверить перпендикулярность зеркал плоскости лимба; определить поправку индекса секстана по Солнцу, применяя контроль; если возможно измерить наклонение видимого горизонта наклономером; привести поправку хронометра к моменту наблюдения. Наблюдения: измерить три-пять высот Солнца, замечая при каждом измерении моменты по хронометру; при измерении средней высоты заметить Тс и ОЛ; записать ИК судна; если высота Солнца не превышает 50, записать температуру и давление воздуха. Вычисления: по замеченному Тс и номеру часового пояса рассчитать приближенное Тгр и гринвичскую дату наблюдений; по среднему моменту хронометра и его поправке получить точное Тгр наблюдений; с помощью МАЕ по Тгр наблюдений и с получить местный практический часовой угол и склонение Солнца; при помощи таблиц ТВА-57 определить счислимые высоту и азимут светила; исправив средний ОС всеми поправками, получить обсервованную высоту Солнца; рассчитать перенос. Первую линию положения прокладывают на карте, если есть необходимость в уточнении счисления. В промежутке между первыми и вторыми наблюдениями следует принимать меры к точному учету всех элементов счисления. Вторые наблюдения выполняют после изменения азимута Солнца на 40-60 в том же порядке, что и первые. При нахождении счислимой высоты и азимута включают в расчет координаты второй счислимой точки. Обе линии положения на карте прокладывают из счислимой точки, сооветсвующей моменту вторых наблюдений. Место судна принимают в пересечении линий положения.
Вопрос №7
Методы и порядок определения обсервованной широты из наблюдений светил: Было установлено, что более точно широта может быть определенна по меридиональным высотам светил, а долгота по наблюдениям светил в первом вертикале.
Определение широты по мериодионнальной высоте светила:
П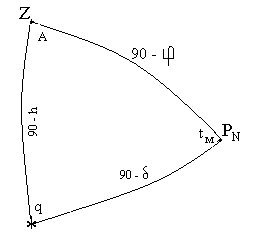 ри
рассмотрении видимого суточного движения
светил, в качестве одной из его
характеристик были определены
меридиональные высоты для различных
светил установлена их четкая зависимость
от широты места наблюдателя и склонения
светила и получены соответствующие
зависимости. Первая представляет собой
общую зависимость меридионального
зенитного расстояния в момент верхней
кульминации от широты и склонения: z =
j~d
(1). Вторая зависимость меридиональной
высоты в момент нижней кульминации от
широты и полярного расстояния: H
= j
-D
(2).
ри
рассмотрении видимого суточного движения
светил, в качестве одной из его
характеристик были определены
меридиональные высоты для различных
светил установлена их четкая зависимость
от широты места наблюдателя и склонения
светила и получены соответствующие
зависимости. Первая представляет собой
общую зависимость меридионального
зенитного расстояния в момент верхней
кульминации от широты и склонения: z =
j~d
(1). Вторая зависимость меридиональной
высоты в момент нижней кульминации от
широты и полярного расстояния: H
= j
-D
(2).
Из ф. (1) получаем: jО = zО~d. Таким образом, для получения обсервованной широты из меридиональных наблюдений светил в верхней кульминации нужно при одноимённых zО и d сложить их, и полученной широте присвоить их же наименование, а при разноимённых – из большей величины вычесть меньшую и полученной широте присвоить наименование большей величины. В нижней кульминации светило может располагаться только между истинным горизонтом и повышенным полюсом. Нижняя кульминация может наблюдаться только над точкой горизонт, одноименной с широтой наблюдателя, при j и d одноименных. Поэтому в формуле всегда следует брать знак «плюс». Из ф.(2) jО = HO’+D широту места в море принято определять только по меридиональным высотам Солнца, хотя в принципе это возможно делать по наблюдениям любого светла. Нижнюю кульминацию Солнца можно наблюдать лишь при плавании в высоких северных или южных широтах, во время полярного дня. Последовательность действий при определении широты по меридиональным высотам:
1. Подготовка к наблюдениям: а) снять с карты jС и lС на предполагаемое ТС кульминации Солнца (или на полдень). б) рассчитать с помощью МАЕ ТС кульминации Солнца; в) подготовить секстан к дневным наблюдениям; г) определить поправку индекса секстана по Солнцу; д) измерить если возможно наклонение горизонта. 2. Наблюдения. а) за 5-7 мин до рассчитанного момента кульминации Солнца начать измерять и записывать его высоты. После получения 2-3 убывающих отсчетов прекратить наблюдения; б) заметить ТС, ОЛ и, если нужно температуру и давление воздуха; в) заметить над какой точкой горизонта N или S измерялись высоты. 3. Вычисления. а) по замеченному при наблюдениях ТС рассчитать ТГР, по которому выбрать из МАЕ склонение Солнца; б) наибольший отсчет секстана исправить всеми поправками. Полученную меридиональную высоту перевести в зенитное расстояние, указав его наименование; в) по фор-ле jО = zО~d получить обсервованую широту судна. У этого метода весьма простое и быстрое решение, не нужно знать точно Тгр, причём широта не зависит от точности счислимой долготы. Вследствие того, что при измерении меридиональных высот светил, как правило, судно движется, и склонение светил непрерывно изменяется, измеренная наибольшая высота не будет меридиональной. Однако разница между меридиональной и наибольшей высотой для звёзд и планет весьма мала без ущерба для точности. Недостатки: возможность только одного измерения высоты светила, следовательно, возможен промах, нельзя уменьшить влияние случайных ошибок наблюдения.
Определение широты по высоте Полярной звезды (ПЗ): Как известно из курса сферической астрономии, широта места наблюдателя на сфере численно равна высоте повышенного полюса и, если бы в полюсе мира располагалось какое-либо светило, то его высота численно равнялась бы его широте. Непосредственно на полюсах мира светил нет, но зато вблизи Северного полюса мира располагается довольно яркая звезда – Полярная. Её склонение в настоящее время чуть больше 89°N и прямое восхождение ~30°. А так как в видимом суточном движении сфера вращается вокруг оси мира, то Полярная звезда будет описывать суточную параллель радиусом D* » 51’. Исходя и выше сказанного делаем вывод, что, азимут Полярной звезды изменяется весьма мало, а её высота близка к значению широты. В моменты верхней и нижней кульминации высота ПЗ отличается от широты наблюдателя на величину D*. Два раза в сутки, когда альмукантарат (малый круг, плоскость которого параллельна плоскости истинного горизонта) ПЗ проходит через PN, разность между jО и h* обращается в ноль. Во всех др. случаях, jО = h* ± x, где х - поправка к высоте Полярной звезды, представляющая собой разность между высотой звезды в какой-либо момент и высотой повышенного полюса. Значение х зависит от положения звезды на ее параллели, то есть, в конечном счете, явл. функцией местного звездного времени SМ. Значение этой поправки получают из МАЕ, в котором приводится табл. «Широта по высоте Полярной», состоящая из трех частей - таблиц. Из табл I по аргументу SМ выбирают первую (основную) поправку к высоте Полярной – попр за х, из табл II - вторую поправку (аргументы SМ и h*) – попр. за сферичность треуг., из табл III - третью поправку (аргументы SМ и дата наблюдений) – попр. измен. D* и a*.
Практическое выполнение определения широты по высоте Полярной звезды. Возможно при плавании в широте от 5° до 75° N. однако практически звезду удобно наблюдать при высотах не более 60-70°. Наблюдения производят в вечерние или утренние сумерки когда горизонт чётко обозначен. Последовательность действий:
1. Подготовка к наблюдениям. а) подготовить секстан к ночным наблюдениям и определить поправку индекса по звезде; б) если надо, то произвести сличение палубных часов с хронометром. 2. Наблюдения. а) измерить 3-5 высот Полярной, замечая моменты по хронометру; б) заметить ТС, ОЛ и если необходимо тем-ру и давление воздуха. 3. Вычисления. а) рассчитать ОСср и TxpСР; б) исправить ОСср всеми поправками получив h*. в) рассчитать приближенное и точное Тгр. Выбрать из МАЕ SМ = tМg; г) выбрать из МАЕ поправки I, II, III по соответствующим аргументам со своими знаками; д) получить обсервованную широту по фор-ле jО = h* +I+II+III. Достоинства: определение широты по высоте Полярной не ограничивается во времени и возможно пока видна звезда. Малое изменение высоты и азимута дает возможность, измерив серию высот, обрабатывать среднюю высоту на средний момент времени, чем уменьшается влияние случайных ошибок наблюдения (чего нет в определении широты по меридиональной высоте светила). (Наивыгоднейшие условие определения широты при расположении светила по А=0 или 180°.)
Вопрос №9
Определение поправки компаса из наблюдений светил методом высот. Достоинства и недостатки.
Запишем зависимость азимута от высоты светила, минуя часовой угол и связанный с ним момент наблюдений. По формуле косинуса стороны:

После преобразований получаем:
![]() -
верхний знак для j
и d
одноименных, нижний – для разноименных.
-
верхний знак для j
и d
одноименных, нижний – для разноименных.
Данную формулу целесообразно применять, когда высота светила точно известна без измерений. Единственным случаем такого знания высоты светила в практике судовождения является момент пересечения светилом видимого горизонта, т.е. видимый восход или заход светила. Широкое распространение получил частный случай метода высот – определение поправки компаса по видимому восходу (заходу) края Солнца. В момент пересечения верхним краем Солнца видимого горизонта, снижение центра рассчитывается так:
hÓ = d - r - RÓ + PÓ. Для е = 12,5м, t = +10°C, В = 760 мм; hÓ = -6,1 – 35,8 – 16,0 + 0,1 = 57,8. Подставляя его в предыдущую формулу:
 по данной формуле
рассчитаны таблицы 20-а и 20-б в МТ – 75 .
по данной формуле
рассчитаны таблицы 20-а и 20-б в МТ – 75 .
Порядок действий |
Достоинства метода |
Недостатки метода |
|
|
|
Вопрос №11
Фигура
и размеры Земли. Их значение для
судовождения.
фигура Земли
– геоид. Геометрия геоида очень сложна.
Это обстоятельство затрудняет обработку
навигационных измерений на его
поверхности, поэтому для решения задач
морской навигации используют аппроксимацию
геоида телом правильной математической
формы. Это тело – эллипсоид вращения,
полученный в результате вращения эллипса
вокруг его малой оси. Используют следующие
условия аппроксимации: Объём эллипсоида
предполагается равным объёму геоида;
Большая полуось эллипсоида совпадает
с плоскостью экватора геоида; Малая
полуось направлена по оси вращения
Земли. Для картографических расчётов
в каждом государстве имеется свой
референц-эллипсоид, который максимально
приближен к поверхности в данном районе
Земли. Важным моментом здесь является
то, что координаты одной точки могут не
совпадать на картах, изданных в разных
государствах. У нас принят референц-эллипсоид
Красовского, имеющий следующие параметры:
большая полуось а=6378245м, малая полуось
b=6356865м,
полярное сжатие d=![]() ,
эксцентриситет e=
,
эксцентриситет e=![]() .В
качестве модели геоида для CНС
применяется модель WGS
– 84. Если карты сделаны на другом
эллипсоиде, необходимо вводить поправки
к данным CНC.
Основные
изолинии: 1.
Геодезическая линия, или Линия кратчайшего
расстояния (на поверхности эллипсоида),
или ортодромия (на поверхности сферы),-
при получении пеленга U
на корабль от какой-либо береговой
точки, положение которой известно.
.В
качестве модели геоида для CНС
применяется модель WGS
– 84. Если карты сделаны на другом
эллипсоиде, необходимо вводить поправки
к данным CНC.
Основные
изолинии: 1.
Геодезическая линия, или Линия кратчайшего
расстояния (на поверхности эллипсоида),
или ортодромия (на поверхности сферы),-
при получении пеленга U
на корабль от какой-либо береговой
точки, положение которой известно.
![]()
![]()
![]()
2. Сферическая изогона – при измерении горизонтального угла между двумя ориентирами А и В. Она проходит через места ориентиров и вмещает измеренный угол . При малых расстояниях до ориентиров сферическая изогона обращается в окружность.
3. Изоазимута, или линия равных пеленгов – при измерении пеленга с корабля на береговой или плавучий ориентир. Изоазимута является геометрическим местом точек вершин равных сферических углов между меридианами и направлениями кратчайших линий, проходящих через объект наблюдения. Ее можно рассматривать как частный случай сферической изогоны, отвечающей измеренному пеленгу и проходящей через полюс Земли и пеленгуемый объект.
4. Изостадия – при измерении расстояния D до ориентира Е; все точки этой изолинии равно удалены от объекта наблюдения. В простейшем случае – окружность.5.)Сфероидическая или сферическая гипербола – при измерении разности расстояний до двух ориентиров А и В, которые лежат в фокусах этой гиперболы.6.) Изобата, или кривая равных глубин, - при измерении глубин моря.
Вопрос №17
Графическое счисление пути судка при различных условиях плавания.
Счислением координат судна называется вычисления текущих координат от известных по времени, курсу и скорости с учётом влияния ветра и течения. Графическим называется счисление, которое ведётся на морской навигационной карте с использованием штурманского прокладочного инструмента. Прокладка бывает предварительной и исполнительной. Предварительная осуществляется при выборе пути судна на переход. Выбор пути определяется его безопасностью и экономичностью. Графическое счисление заключается в систематическом нанесении положения судна на карту по направлению его движения и пройденному расстоянию на основании показаний компаса и лага, а также сведений о дрейфе и течении. Начальная точка счисления должна быть известна. Место полученное по счислению называется счислимым. Контроль за прокладкой ведётся при помощи ОМС навигационным, астрономическим и радионавигационным способами. Счисление должно быть непрерывным, наглядным и точным, т.е . оно должно давать возможность штурману в любой момент видеть нанесённое на карте положение судна относительно окружающей обстановки.
Условием, обеспечивающим непрерывность счисления, является автономность и непрерывность работы ТСС и следование правилам НШС-82. При ведении прокладки решается 2 задачи: прямая и обратная. Прямая предусматривает учёт движения судна, когда курс рулевому уже задан; обратная состоит в определении курса, который следует задать рулевому для следования требуемым ИК.
Вопрос №14
Системы счета направлений, перевод и исправление румбов. Воображаемую горизонтальную плоскость, проходящую через глаз наблюдателя, называют плоскостью истинного горизонта наблюдателя. Вертикальную плоскость, проходящую через отвесную линию и ось вращения Земли, называют плоскостью истинного меридиана наблюдателя. Пересекаются обе плоскости по прямой N-S, называемой полуденной линией, или линией истинного меридиана наблюдателя. Вертикальную плоскость, перпендикулярную плоскости истинного меридиана наблюдателя, называют плоскостью первого вертикала. Она пересекается с плоскостью истинного горизонта по прямой, указывающей направление E-W. Направления N, E, S, W называют главными направлениями, или румбами, в плоскости истинного горизонта, которыми эта плоскость делится на четыре равные части: NE, SE, SW, NW. Любое направление (румб) на поверхности Земли измеряют углом в плоскости истинного горизонта. Круговая система: весь горизонт делят на 360, а счет направлений ведут от 0 до 360 по часовой стрелке от N-й части истинного меридиана наблюдателя. Полукруговая система: счет направлений ведут как от N-й, так и от S-й частей истинного меридиана наблюдателя в сторону E или W от 0 до 180. Для направлений полукругового счета, кроме величины угла, указывают, от какой части истинного горизонта и в какую сторону отсчитаноданное направление (N98E). Четвертная система: каждую четверть горизонта делят на 90, счет направлений ведут как от N-й, так и S-й частей истинного меридиана наблюдателя в сторону E или W от 0 до 90. Направление показывают наименованием четверти и соответствующим углом (SE 32). Румбовая система: ее употребляют для указания направлений ветра, волнения, течения. Весь горизонт делят на 32 направления – румба, каждый из которых составляет 11,25 и имеет соответствующее буквенное наименование, определяющее его отстояние от главных и четвертных румбов. В навигации приходится задавать направления движения судна, определяемые путевым углом, а также направления на видимые с судна ориентиры. Путевым углом называют двугранный угол между нордовой частью плоскости истинного меридиана и вертикальной плоскостью, совпадающей с линией перемещения судна. Если на судно не влияет ветер, вызывающий дрейф и течение, линия перемещения судна совпадает с направлением его диаметральной плоскости. В этом случае направление движения судна определяется истинным курсом. Истинным курсом (ИК) называется двугранный угол между нордовой частью плоскости истинного меридиана и носовой частью диаметральной плоскости судна. Направление на ориентир определяется двугранным углом между нордовой частью плоскости истинного меридиана и вертикальной плоскостью, проходящей через место наблюдателя и ориентир. Этот угол называется истинным пеленгом (ИП). Оба угла отсчитываются от нордовой части истинного меридиана по часовой стрелке от 0 до 360°. На плоскости истинного гори зонта ИК и ИП измеряют плоскими углами, образованными прямыми линиями, по которым плоскость истинного меридиана, диаметральная плоскость судна вертикальная плоскость, проходящая через ориентир, пересекаются с плоскостью истинного горизонта. Угол, отличающийся от ИП на 180°, называется обратным истинным пеленгом (ОИП), ОИП = ИП ± 180; ИП = ОИП ±180. Знак плюс (+) при расчетах берется в. том случае, если ИП (ОИП) меньше 180, знак минус (— ), если ИП (ОИП) больше 180°. ОИП является углом при ориентире, отсчитываемым от нордовой части истинного меридиана ориентира по часовой стрелке до направления с ориентира на судно Курсовым углом (К У) называется угол в плоскости истинного горизонта, заключенный между носовой частью диаметральной плоскости судна и направлением на ориентир. Счет курсовых углов ведется по круговой системе от 0 до 360° по часовой стрелке или вправо и влево от ДП от 0 до 180°. ИП=ИК+КУ; ИК=ИП — КУ; КУ = ИП — ИК. Гирокомпасным курсом называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части ГК меридиана по часовой стрелке до носовой части ДП судна. Гирокомпасным пелепгом называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части ГК меридиана по часовой стрелке до направления на ориентир. ИК=ГКК+ГК; ИП=ГКП+ГК. Магнитные курсы и пеленги. Такие направления, называемые магнитным курсом {МК) и магнитным пеленгом {МП), показывает магнитный компас, если он находится только под действием сил земного магнетизма и на него не влияют никакие другие магнитные поля. Магнитным курсом называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части магнитного меридиана по часовой стрелке до носовой части диаметральной плоскости судна; Магнитным пеленгом называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части магнитного меридиана но часовой стрелке до направления на ориентир.Угол, отличающийся от МП на 180, называется обратным магнитным пеленгом (ОМП), отсюда ОМП= МП ± 180°, или МП =ОМП ± 180. Магнитные курсы и пеленги могут лежать в пределах от 0 до 360 . Зная магнитное склонение в данном месте Земли, можно по известным магнитным направлениям получить истинные. ИК=МК-d ИП=МП+ d ОИП=ОМП+ d МК=ИК-d МП=ИП-d ОМП=ОИП-d КОМПАСНЫЕ КУРСЫ И ПЕЛЕНГИ Находящиеся в магнитном поле Земли детали набора и другие стальные и железные части, судна постепенно намагничиваются и приобретают свойства магнита. В результате этого в окружающем судно пространстве возникает собственное магнитное поле, действие которого складывается с магнитным полем Земли. Магнитная стрелка судового компаса устанавливается по равнодействующей сил обоих полей, вследствие чего отклоняется от направления магнитного меридиана. Горизонтальный угол, на который плоскость компасного меридиана отклоняется от плоскости магнитного меридиана, называется девиацией магнитного компаса Девиация отсчитывается от северной части магнитного меридиана N к E или W от 0 до 180 Компасным курсом (КК) называется угол в плоскости истинного горизонта, отсчитываемый от нордовой .части компасного меридиана по часовой стрелке до носовой части диаметральной плоскости судна Компасным пеленгом (КП) называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части компасного меридиана по часовой стрелке до направления на ориентир. Угол отличающийся от КП на 180°, называется обратным компасным пеленгом (ОКП.) ОКП = КП ± 180° ; КП = ОКП ± 180°..МК=КК+д МП=КП+д ОМП=ОКП+д КК=МК-д КП=МП-д ОКП=ОМП-д.
Вопрос №16
Скорость судна и ее измерение, навигационные способы определения скорости судна и поправки лага. Скорость судна зависит от силы упора винта, обрастания корпуса судна (уменьшение на 5-10%), волнения и ветра (при попутном ветре до 3-4 б. скор, судна увелич., а при встреч, и попут. свыше 4 6.- скор, судна из-за волнения уменьшается), мелководья (глубина меньше 3-х осадок уменьшает скорость), загрузки, дифферента (оптим. посадка судна при движ. на ровном киле), течения.
Измерение ск-ти судна вып. на ход. испытаниях с исключением действия течения путам увеличения числа пробегов: 1 пробег - при отсутствии течения: VO=S/t 2 пробега - скорость теч-я постоянна: VO=(V1+V2)/2; 3 пробега - ускорение теч-я постоянно: VO=(V1+2V3+V3)/4; 4 пробега - ускорение теч-я меняется равномерно: VO=(V1+3V3+3V3+V4)/8. К навиг. способам определения V относятся:
а). По обсервациям, с исключением известного течения.
б). По дистанциям РЛС, измер. до ориентира при следовании прямо на или от ориентира, точность увеличивается многократностью измерений.
в). По 3-м дистанциям, измер. в разные моменты времени до ориентира:
V = 6[(D1×t21+ D3×t32+D2×t31)/( t21×t32 ×t31)]1/2, D в кбт, t в мин.
г). С помощью планширного лага особенно на траловом промысле V=1,94×S/t[м/сек].
д). По «мусору», выброшенному за борт (бросаем в воду плавучий предмет и засекаем время) увеличить точность можно за счет увеличения числа измерений.
д). По плавучему ориентиру (буй) для исключения действия течения с помощью измерения расстояний до него по РЛС.
3). Определение поправки лага является обязательной задачей безопасности плавания. В практических расчетах удобнее величина коэф. лага:
![]() ;
;![]() ;
Dл
и Кл определяются для нескольких
режимов работы машины. Методы
определения
аналогичны
методам определения скорости.
;
Dл
и Кл определяются для нескольких
режимов работы машины. Методы
определения
аналогичны
методам определения скорости.
Пример. Определение поправки лага на мерной миле (линии) без течения. Мерная линия представляет собой специально оборудованный полигон, предназначенный для определения скорости хода и других маневренных элементов судна, а также поправки лага. Мерная линия оборудуется несколькими параллельными секущими створами, которые устанавливаются на берегу. Расстояние между секущими створами точно измеряется и указывается на картах или в навигационных пособиях. Для определения скорости хода и поправки лага судно, управляемое по компасу, ложиться на линию истинного курса, перпендикулярную секущим створам, и развивает нужную скорость. При пересечении линий секущих створов фиксируют моменты времени по секундомеру и отсчёты лага. Так как в районе мерной линии в нашем случае течение отсутствует, скорость хода судна относительно воды при заданной частоте вращения винтов и поправка лага или коэффициент лага могут быть рассчитаны на основании результатов одного пробега по формулам:
![]() ;
;
;
;
;
;
где S – длина пробега (расстояние между секущими створами), мили;
t – продолжительность пробега, с;
рол=ол2 -ол1 – разность отсчётов лага в моменты пересечения секущих створов.
Для достижения достаточной точности определения скорости хода и поправки лага необходимо выполнить ряд требований: – к началу измерений судно должно развить заданную скорость хода и сохранять её в течение всего пробега; – во время пробега судно должно следовать постоянным курсом; – ветер и волнение в районе испытаний не должны превышать соответственно 3 и 2 баллов;
– глубины должны быть достаточными.
Вопрос №18