

2. Исследование замкнутой системы регулирования
2.1. Замкнутая система без регулятора
Модель замкнутой системы приведена на рис. 2.1.
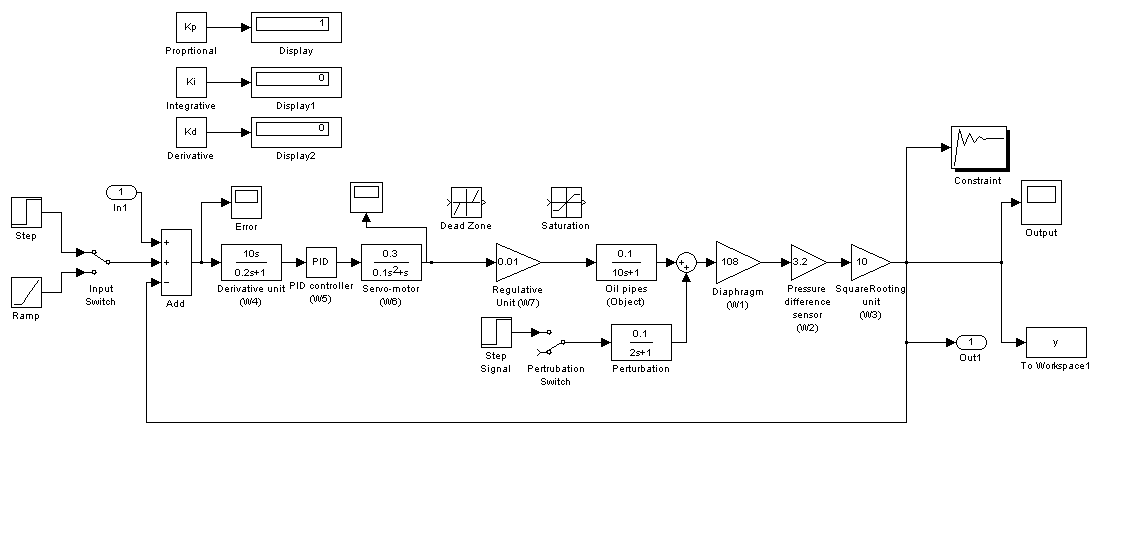 Рис.
2.1. Модель замкнутой системы без
регулятора.
Рис.
2.1. Модель замкнутой системы без
регулятора.
В левой верхней части отображаются значения переменных, входящих в состав регулятора. Kp– пропорциональная часть,Ki– интегральная. Сейчас пропорциональная часть равна единице, а остальные – нулям, что соответствует линейному звену с коэффициентом усиления 1. То есть регулятор прозрачен – его просто-напросто нет.
Реакцию такой системы на единичную “ступень” можно увидеть на рис. 2.2.
Коэффициент усиления системы стал равен 0,91, а время регулирования уменьшилось в 10 раз до 2,5 с. Перерегулирование осталось равным нулю, время подъема – 1,25 с. Временные показатели качества значительно улучшились.

Рис. 2.2. Реакция замкнутой системы без регулятора на единичное ступенчатое воздействие y(t) и суммарная ошибкаe(t).
Подтвердим это теоретически, рассчитав установившиеся значения регулируемой величины и установившейся ошибки.

Значения установившейся ошибки, полученные теоретически совпадают со значениями на графике (рис.2.2).
Даже при всех улучшениях показателей качества замкнутая система нам не подходит, так как установившаяся ошибка не равна нулю.
Для ее устранения следует ввести регулятор. В следующих пунктах нашего исследования, мы введем в систему П- и ПИ-регуляторы и проанализируем характеры процессов, выбрав подходящий.
2.2. Синтез п-регулятора
Установим в систему П-регулятор и попытаемся подобрать его параметры. На рис. 2.3 изображены реакции на единичную “ступень” на входе при различных kp.

Рис. 2.3. Реакция системы при различных kp.
Как видно из графиков, при увеличении kp, система становится более колебательной и, в конце концов процесс становится расходящимся. Запасы по фазе и амплитуде уменьшаются с увеличениемkp.
Обратимся к теории. По формулам из пункта 2.1 видно, что на практике невозможно добиться нулевой установившейся ошибки при использовании П-регулятора, так как он влияет только на изменение коэффициента К. Можно попробовать увеличитьК, но это повлечет за собой увеличение колебательности и уменьшение устойчивости системы.
Это нам абсолютно не подходит, поэтому перейдем к ПИ-регулятору.
2.3. Синтез пи-регулятора
Имплементируем в систему ПИ-регулятор и исследуем характер процессов при различных значениях Ti и kp.
 Рис.
2.4. Графики выхода y(t),
ошибкиe(t)
и значения на входе НЭx(t)
при единичном “ступенчатом” воздействии.
Рис.
2.4. Графики выхода y(t),
ошибкиe(t)
и значения на входе НЭx(t)
при единичном “ступенчатом” воздействии.
Уже минимальный подбор параметров дает нам хорошие значения установившей ошибки и времени регулирования (рис. 2.4). Графики приведены при значениях Ti = 11,28 иkp=1,152.
Время регулирования tр=1,8 c;eуст=0;перерегулирование отсутствует.
Приведем для сравнения ЛЧХ разомкнутой системы с этим регулятором (рис. 2.5).

Рис. 2.5. ЛЧХ разомкнутой системы с ПИ-регулятором.
Запас по амплитуде 22 дБ, запас по фазе – 71˚, а частота среза - 1,16 рад/с.
Частотные и временные показатели качества подходящие. Время регулирования маленькое, а запасы достаточно велики, установившаяся ошибка равна нулю, поэтому ПИ-регулятор нам подходит.
Опять попытаемся произвести теоретический расчет.

Действительно, фактические данные совпадают с теорией. Займемся исследованием системы.