

Министерство образования и науки
Российской Федерации
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ»
Факультет компьютерных технологий и информатики
Кафедра автоматики и процессов управления
Пояснительная записка к курсовому проекту
по дисциплине
ЛОКАЛЬНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
на тему
“Система автоматического регулирования расхода газа в трубе”
Выполнили: Ермилова А.Н.
Серов М.В.
Проверил: проф. Терехов В. А.
Санкт-Петербург
2005
Содержание
Задание на курсовое проектирование 3
1. Предварительный расчет системы Выбор параметров. Построение разомкнутой системы 6
2. Исследование замкнутой системы регулирования 12
2.1. Замкнутая система без регулятора 12
2.2. Синтез П-регулятора 15
2.3. Синтез ПИ-регулятора 17
3. Моделирование и исследование системы 19
3.1. Исследование системы по единичному “ступенчатому” задающему воздействию. 19
3.2. Исследование системы по линейно нарастающему задающему воздействию 21
3.3. Моделирование системы по возмущающему воздействию 23
3.4. Анализ чувствительности системы к изменению параметров
объекта 26
3.5. Моделирование системы с нелинейным элементом 31
Заключение 34
Список литературы 35
Задание на курсовое проектирование
Система автоматического регулирования расхода газа
Описание системы:
Объект регулирования (ОР): магистраль газопровода (топливная магистраль). Регулируемая величина y: расход газаQ[м3 /с],измеряемый с помощью диафрагмыД(рис.1.1, поз.а) и датчика расходаFT. С помощью автоматического регистрирующего устройстваFIRосуществляется индикация и запись величины расходаQ.
Систему измерения
расхода газа необходимо дополнить
системой автоматического
регулирования (рис.1.1, поз.б) и
рассчитать параметры регулятора.
Информация о перепаде давления с
диафрагмы001поступает на датчик
разности давления![]() 010и с его выхода в виде
унифицированного токового сигналаI
поступает на коренатор015.
Выход-
010и с его выхода в виде
унифицированного токового сигналаI
поступает на коренатор015.
Выход-
Рис. 1.1.
ной сигнал коренатора, пропорциональный расходу Q, подается на регистри-
рующий автоматический потенциометр 031и дифференциатор040. С вы-
х ода
дифференциатора сигнал поступает на
вход регулятора050. Регуля-
ода
дифференциатора сигнал поступает на
вход регулятора050. Регуля-
тор выдает сигнал управления на электропневматический серводвигатель EPS060, с помощью которого измеряется проходное сечение регулирующего вентиля070(регулирующего органа системы). Все устройства системы питаются от источника012(пунктирные линии) и трансформатора011.
Исходные данные для расчета системы приведены в табл.1.1.
Таблица 1.1.
|
Позиция |
Элементы системы |
Передаточные функции
|
Параметры | ||
|
000 |
Топливная магистраль (ОР) |
|
| ||
|
001 |
Диафрагма (Д) |
|
| ||
|
010 |
Датчик разности Давлений |
|
| ||
|
015 |
Коренатор |
|
| ||
|
040 |
Дифференциатор (P) |
|
| ||
|
050 |
Регулятор (R) |
1. П-регулятор
2. ПИ-регулятор
|
| ||
|
060 |
Серводвигатель (EPS) |
|
| ||
|
070 |
Регулирующий орган (РВ) |
|
| ||

1.Предварительный расчет системы. Выбор параметров. Построение разомкнутой системы
Построим структурную модель системы (рис. 1.1.1).

Рис. 1.1.1. Структурная модель регулирования.
Прежде чем начинать расчеты построим математическую модель системы и выберем параметры блоков.
Будем руководствоваться следующими соображениями:
- уже на этапе построения следует попытаться добиться хороших показателей качества; таким образом нужно выбирать как можно меньшие постоянные времени, но достаточно большие коэффициенты усиления;
- на этом же этапе можно попытаться получить хорошие запасы по фазе и амплитуде.
Подавляющее большинство параметров приведены к такой форме, в которой размерность величины находится либо в системе СИ, либо сокращается с соответствующими ей размерностями. Поэтому единственное, что нужно сделать – это перевести часы в секунды у коэффициента усиления диафрагмы (звено W1):
108 ≤ k1 ≤ 468.
Перед началом подбора следует посчитать kкр – критический коэффициент усиления разомкнутой системы, при котором замкнутая система будет на границе устойчивости. Но прежде стоит выбрать постоянные времени элементов. Объект регулирования будет иметь большую постоянную времениТ0 - 10 с, а дифференциатор T4и серводвигатель T6– малые – 0,2 с и 0,1 с соответственно. Таким образом первый перегиб ЛАЧХ происходит на частоте 0,1 рад/c, а следующие два на частотах 5 и 10 рад/c. Это дает нам достаточно большую полосу устойчивости – суть границу изменения коэффициента усиления всей системы.
Передаточная функция разомкнутой системы Wp(s) в общем виде будет равна:
 а передаточная
функция замкнутой системы Wз(s)
выглядит так:
а передаточная
функция замкнутой системы Wз(s)
выглядит так:
Связка “интегратор-дифференциатор” выявляется в виде нулевого диполя. Придется надеяться на доброкачественных производителей дифференциатора и серводвигателя, так как отклонения в параметрах могут существенно сказаться на характере процессов.
С учетом выбора постоянных времени объекта, дифференциатора и серводвигателя запишем:

Проведем расчет
критического коэффициента усиления
всей замкнутой системы kkp
и проанализируем ее устойчивость.По критерию Гурвица, для
характеристического полинома замкнутой
системы должно быть справедливо
неравенство![]() ,
где
,
где
![]() не отрицательные
коэффициенты при степенях характеристического
полинома.
не отрицательные
коэффициенты при степенях характеристического
полинома.
Характеристический полином замкнутой системы:
![]()

Подставляя в неравенство соответствующие коэффициенты и решая его относительно К, получаем следующее ограничение:
К<149.
Значение Кбольшое, благодаря чему существует запас по усилению и замкнутая система будет устойчива даже при сильных вариациях коэффициентов усиления. Это значит, что выбранные постоянные времени нам подходят.
Таким образом, сделаем следующий выбор параметров:
- топливная магистраль: k0=0,1; T0=10;
- диафрагма: k1=108;
- датчик разности давлений: k2=3,2;
- коренатор: k3=10;
- дифференциатор: T4=0.2; τ4=10;
- серводвигатель: k6=0,3; T6=0,1;
- регулирующий орган: k7=0,01.
В итоге коэффициент усиления всей системы равен:
![]() .
.
Однако, вернемся к анализу разомкнутой системы. ЛЧХ разомкнутой системы без регулятора можно увидеть на рис. 1.2.
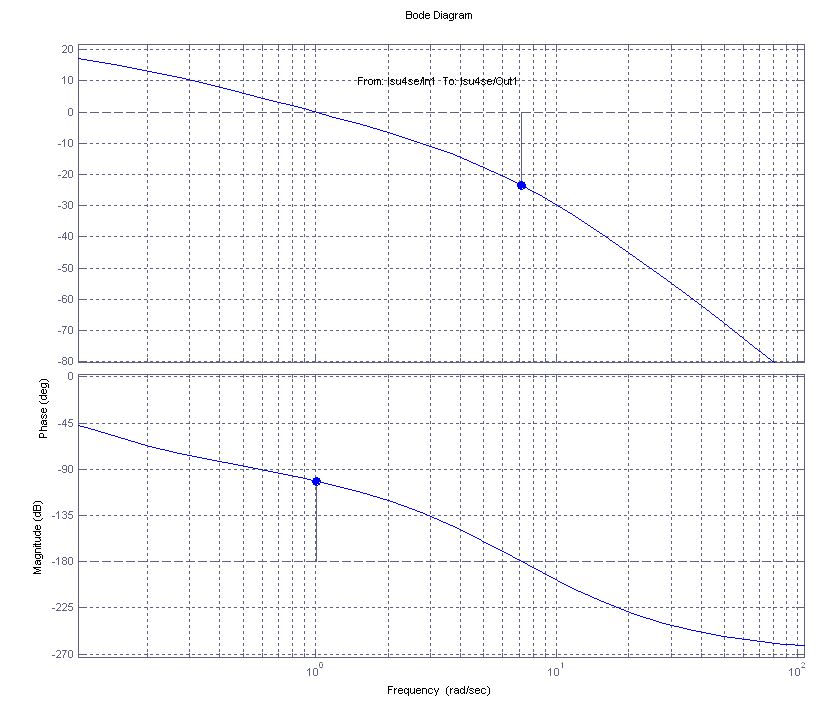
Рис. 1.2. ЛЧХ разомкнутой системы без регулятора в зоне частоты среза.
Частота среза этой системы составляет 1,01 рад/с, а запасы по фазе и амплитуде равны 78,5 град.и 23,5дБсоответственно. Коэффициент усиления равен 10,367.
Это достаточно хорошие показатели – назовем их “начальными” и в оптимизации будем отталкиваться именно от них. Стоит еще присовокупить к ним временные показатели качества – время регулирования, перерегулирование, время подъема. Для этого стоит показать реакцию системы на единичное “ступенчатое” воздействие на входе (рис. 1.3).

Рис. 1.3. Реакция разомкнутой системы на единичное “ступенчатое” воздействие.
Время регулирования в данной системе достаточно большое – 26,5 с. Перерегулирования – нет, а время подъема – 18 с.
Такая система, естественно, не подходит, поэтому начнем строить замкнутую систему регулирования с П-/ПИ-регулятором и исследовать уже ее характеристики.