

3.3. Расчёт регуляторов
Синтез регулятора будем проводить используя метод частотных характеристик, для чего будем строить желаемую ЛАЧХ системы.
Отметим, что среднечастотный участок желаемой ЛАЧХ определяет основные динамические свойства: время переходного процесса, величину перерегулирования, запас устойчивости по фазе и амплитуде. Построение среднечастотного участка желаемой ЛАЧХ состоит в определении частоты среза, по заданным показателям качества: времени переходного процесса, и величине перерегулирования.
Высокочастотный участок, определяет сглаживающие свойства системы по отношению к помехам. Чем больше наклон высокочастотного участка, тем больше помехоустойчивость системы.
Низкочастотный участок определяет точность системы, на низких частотах система должна иметь наклон –20 дБ/дек, чтобы обеспечить нулевую установившуюся ошибку.
Будем исходить из следующих условий:
система с желаемой ЛАЧХ должна обеспечивать все необходимые показатели качества;
должны быть учтена структура регулятора и диапазон его возможных параметров.
ПИ-регулятор
ЛЧХ исходной и желаемой систем, и ПИ-регулятора (см. рис. 1.5.)
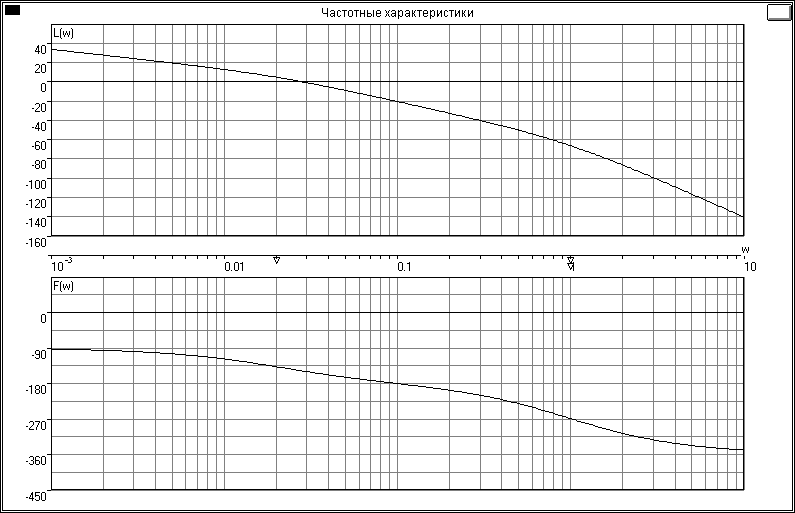
Рис.1.5. Частотный синтез ПИ-регулятора
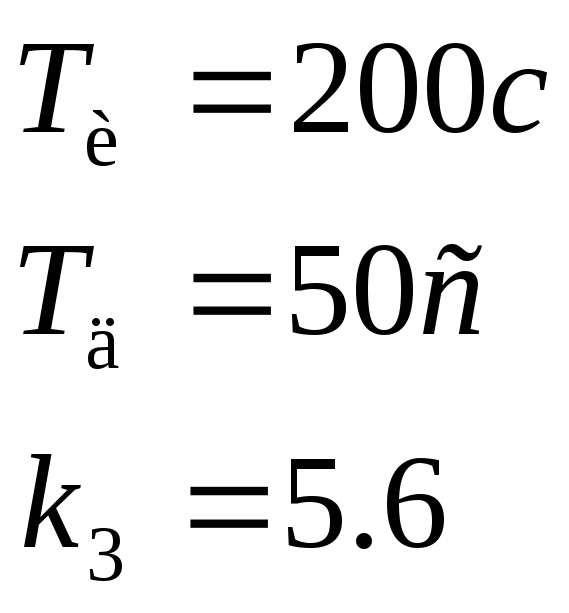
Получившийся ПИ-регулятор имеет следующие параметры
![]()
![]()
![]()
Для наглядности построим ЛЧХ разомкнутой системы с ПИ-регулятором отдельно, рис.1.6.

рис.1.6. ЛЧХ разомкнутой системы с ПИ-регулятором
Запас
по фазе
![]() ,
это значение меньше, чем в системе без
регулятора.
,
это значение меньше, чем в системе без
регулятора.
Построим переходный процесс замкнутой системы с ПИ-регулятором
(см. рис.1.7)
 рис.1.7.
Переходный процесс замкнутой системы
с ПИ-регулятором
рис.1.7.
Переходный процесс замкнутой системы
с ПИ-регулятором
Из рисунка видно, что время регулирования tр = 528.6829 с
и перерегулирование % = 50.90%, эти значения больше, чем в системе без регулятора.
Следовательно, ПИ-регулятор не только не улучшает показатели качества системы, но и ухудшает. Таким образом, в данном диапазоне параметров ПИ-регулятор, улучшающий характеристики системы, не реализуем.
ПИД-регулятор
ЛЧХ исходной и желаемой систем, и ПИД- регулятора (см. рис. 1.8.)

Рис. 1.8. Частотный синтез ПИД-регулятора
Получившийся ПИД-регулятор имеет следующие параметры
![]() ,
,
![]()
Отдельно построим ЛЧХ разомкнутой системы с ПИД-регулятором (см. рис.1.9.)

рис.1.9. ЛЧХ разомкнутой системы с ПИД-регулятором
Запас
по фазе в системе с ПИД-регулятором стал
равным
![]() ,
что почти в 2 раза больше, чем в исходной
системе и это хорошо. На порядок
увеличилась частота среза, что даёт
лучшее быстродействие системе.
,
что почти в 2 раза больше, чем в исходной
системе и это хорошо. На порядок
увеличилась частота среза, что даёт
лучшее быстродействие системе.
Построим график переходного процесса замкнутой системы с ПИД-регулятором(см.рис.1.10)

рис.1.10. Переходный процесс замкнутой системы с ПИД-регулятором
Видно, что время регулирования tр = 12.4570 с и перерегулирование% = 6.83% значительно меньше, чем в исходной системе.
Для наглядности сравним показатели качества исходной системы и системы с полученным ПИД-регулятором.
|
|
Исходная система |
Система с ПИД-регулятором |
|
Время регулирования tр,с |
339 |
12.45 |
|
Перерегулирование % |
39% |
6.83% |
|
Запас
устойчивости |
32 |
62 |
4. Моделирование системы
Моделирование системы проводится в среде MATLAB\ Simulink. Полная модель, включающая нелинейности, звено эквивалентного возмущения и вспомогательные элементы приведена на рис. 2.1. Так как ПИД-регулятор является физически нереализуемым звеном, то для моделирования в его ПФ было добавлено апериодическое звено с малой постоянной времени, что не скажется на процессах в системе, но позволит провести моделирование.

Рис. 2.1. Модель системы в среде MATLAB/Simulink