

8. Определение передаточных функций синтезированных приводов
Разомкнутая передаточная функция частотного привода есть передаточная функция желаемой ЛАЧХ и имеет вид:

Разомкнутая передаточная функция позиционного привода:

Получим передаточные функции приводов по задающему воздействию:
1. Передаточная функция частотного привода (U2=0):

2. Передаточная функция позиционного привода (U2=0):

31
Получим передаточные функции приводов по возмущающему воздействию:
1. Передаточная функция частотного привода (U1=0):

2. Передаточная функция позиционного привода (U1=0):

32
Для каждой передаточной функции в среде Mathlab определим переходную характеристику, АФЧХ и ЛАФЧХ.
1. Передаточная функция синтезированного частотного привода по задающему воздействию:
![]()
Переходная характеристика

ЛАФЧХ

33
АФЧХ

2. Передаточная функция синтезированного частотного привода по возмущающему воздействию:
![]()
Переходная характеристика

34
ЛАФЧХ

АФЧХ

35
3. Передаточная функция синтезированного позиционного привода по задающему воздействию:
![]()
Переходная характеристика

ЛАФЧХ

36
АФЧХ

4. Передаточная функция синтезированного позиционного привода по возмущающему воздействию:
![]()
Переходная характеристика

37
ЛАФЧХ

АФЧХ

38
9. Схемы синтезированных приводов в среде Simulink
Схемы (1) и (2) приводов соберём в среде Simulink и построим по ним переходные характеристики по задающему и возмущающему воздействиям.
Рассмотрим частотный привод:
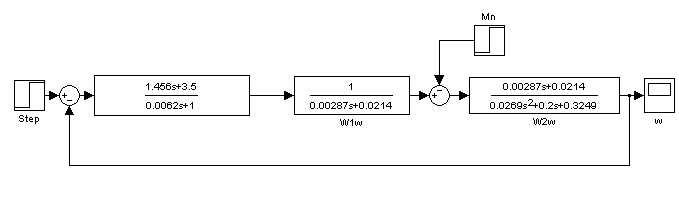
Подадим на вход этой системы единичное задающее воздействие, тогда получим следующую переходную характеристику:

Подадим на вход единичное возмущающее воздействие:

39
Рассмотрим позиционный привод:

Подадим на вход этой системы единичное задающее воздействие, тогда получим следующую переходную характеристику:

Подадим на вход единичное возмущающее воздействие:

Полученные переходные характеристики в среде Simulink аналогичны переходных характеристикам, полученным в пункте 8 по передаточных функциям.
40
10. Оценка соответствия полученных результатов
с требуемыми показателями качества
Требуемые показатели качества:
Время
переходного процесса синтезируемых ЭП
tпп![]() 0,35
с.
0,35
с.
Требуемое перерегулирование синтезируемых ЭП σ 20%.
Максимальная установившаяся ошибка регулирования
Амплитуда задающего гармонического воздействия ЭП Xmax=0,7.
Частота задающего гармонического воздействия ЭП рад/с.
Требуемый показатель колебательности синтезируемых ЭП М=1,85.
Требуемый запас устойчивости по фазе для синтезируемых ЭП .