

Предмет: Тактика пс
Тема № 3 Основи бойового застосування підрозділів РТВ.
Заняття №3 Радіолокаційне поле, зона інформації, їх властивості та характеристика.
Навчальні питання :
1. 3она інформації, її характеристика.
2. Радіолокаційне поле, види РЛП.
3. Характеристика та властивості РЛП.
Перше питання: Зона інформації, її характеристики
Кожний РЛК (РЛС, ПРВ) під час вмикання утворюють зону виявлення, (висотоміри - зону вимірювання висоти).
Зона виявлення (ЗВ) - область простору, в межах якої радіолокаційні цілі із заданою ефективною поверхнею відбиття (ЕПВ) виявляються в кожному огляді простору з імовірністю не нижче заданої.
Розміри зони виявлення визначаються тактичними характеристиками РЛК (РЛС), ефективною поверхнею відбиття цілі, рівнем шуму, що надходить на вхід приймача РЛК (РЛС).
Форма зони виявлення залежить від діаграм направленості РЛК, відбиваючої поверхні довкілля, рельєфу місцевості.
На практиці в якості вихідної зони виявлення РЛК (РЛС) приймається зона, імовірність виявлення цілі в межах якої дорівнює 0,5 при ЕПВ 1м2.
Зони виявлення різних типів РЛК (РЛС) навіть при розміщенні їх на одній позиції відрізняються одна від одної формою та розмірами через різниці їх технічних характеристик та впливу підстилаючої поверхні довкілля на діаграму направленості РЛС.
Кожний дальномір, висотомір, апаратура розпізнавання забезпечують певні дані про повітряний об’єкт.
Сукупність зон виявлення, вимірювання висоти, розпізнавання засобів радіотехнічних підрозділів, що розгорнуті на одній позиції, забезпечують одержання повної інформації про ціль і утворюють зону радіолокаційної інформації (РЛІ) підрозділу.
Під зоною РЛІ радіолокаційної роти розгорнутої на одній бойовій позиції розуміють найбільшу для даних умов обстановки область повітряного простору, в межах якої забезпечується виявлення площинних координат, висоти польоту, державної належності повітряних цілей та їх характеристик.

Рис.1. Зона інформації орлр
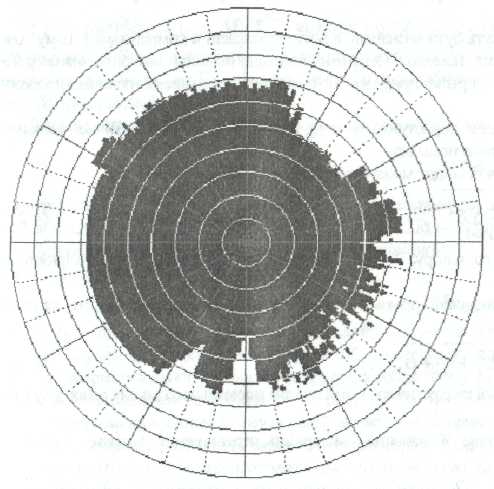
Рис. 2. Приклад відображення площини перетину зони виявлення на висоті 300 м РЛК 5Н87 (масштаб 100 км)

Рис. 3. Приклад відображення границі перетину зони виявлення на висоті 300 м РЛК 5Н87
(масштаб 100 км)
Взаємне торкання та перекриття зон РЛІ сусідніх рлр на визначеній висоті є умовою формування РЛП угрупування РТВ (РТБ).
Таким чином сукупність зон РЛІ кількох рлр радіотехнічного батальйону створюють радіолокаційне поле батальйону.
Поле пасивної локації створюється як за допомогою приймачів РЛС (РЛК) тих же радіотехнічних підрозділів так і комплексами пасивної локації, які використовують, для виявлення та визначення тактичних характеристик цілей, надвисокочастотні сигнали, що випромінюються ними.
Кожний комплекс пасивної локації створює зону пеленгації, яка є областю простору, в межах якої забезпечується визначення пеленгів на ПАП в азимутальній та кутомірній площинах.
На розміри та форму зони пеленгації комплексів пасивної локації впливають його технічні характеристики, рельєф місцевості, рівень потужності шуму, що випромінюються з борту повітряного об’єкту та висота його польоту.
Область, співпадання зон пеленгації двох підрозділів створює зону тріангуляції ПАП.
Друге питання: Радіолокаційне поле, види радіолокаційних полів.
Радіолокаційне поле - це повітряний простір, в межах якого засобами радіолокаційного угрупування РТВ забезпечується виявлення, супроводження, визначення тактичних характеристик повітряних цілей та своїх літаків з імовірністю не менше заданої.
В залежності від засобів, що застосовуються та методів локації угрупування РТВ створює РЛП, що складається з полів активної та пасивної локації.
Поле активної локації створюється РЛК (РЛС), що використовують для виявлення та визначення тактичних характеристик повітряних об’єктів за допомогою відбитих від них сигналів.
За призначенням РЛП може бути полем розвідувальної інформації (розвідки) та полем бойової інформації; черговим полем та резервним.
Поле розвідувальної інформації це область повітряного простору в якій ведеться радіолокаційна розвідка ЗПН противника та виявлення (супроводжування) своїх літаків.
Розвідувальна інформація видасться на КП з’єднань ПС для оцінки та викриття задуму дій ЗПН противника та управління силами ППО в ході бойових дій.
Для формування цього поля використовуються РЛС (РЛК) чергового режиму, загального призначення.
Складовою частиною РЛП є поле бойової інформації, в якому забезпечується добування РЛ інформації, що використовується частинами ЗРВ, ВА, РЕБ для вирішення завдань цілерозподілу та наведення.
Для формування поля бойової інформації використовується РЛС (РЛК) бойового режиму, що мають найкращі точності характеристики вимірювання координат та високі інформаційні можливості.
Черговими та додатково увімкненими засобами радіолокації угрупування РТВ створюється чергове радіолокаційне поле для ведення безперервної радіолокаційної розвідки з метою своєчасного виявлення ЗПН противника, викриття початку удару при раптовому нападі та негайної видачі РЛІ на КП споживачів та органи Цивільної оборони і вирішення інших завдань бойового чергування.
З метою підвищення живучості угрупування РТВ, скорочення часу на відновлення боєздатності радіотехнічних підрозділів створюється резервне РЛП.
Радіолокаційне поле по просторовій структурі в вертикальній площині може бути одноярусним і двоярусним.
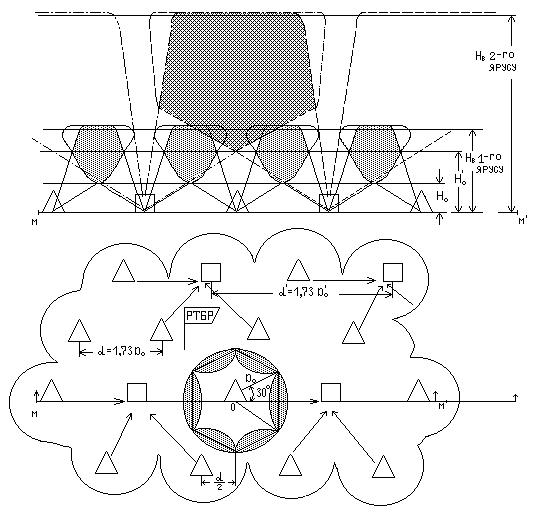
Рис.2. Двоярусне радіолокаційне поле і бойовий порядок ртбр.
Одноярусне поле формується по всьому заданому діапазоні висот всіма РЛС (РЛК) приблизно рівною ступеню їх участі.
У двоярусному полі перший ярус формується всіма підрозділами угрупування; для цього в кожному підрозділі використовується РЛС з кращими характеристиками по виявленню цілей на малих висотах. Другий ярус створюється за рахунок РЛС дальнього виявлення.
Двоярусне РЛП тактично більш раціональне та економічно більш вигідне ніж одноярусне.
Кількість підрозділів, необхідних для створення суцільного РЛП в заданих межах з параметрами, що вимагаються в обох випадках однакова, але при одноярусній побудові поля всі підрозділи оснащені станціями дальнього виявлення, тоді як для двоярусного поля таким РЛС оснащуються тільки одна третина підрозділів, а дві третини – більш дешевими РЛС виявлення цілей на малих висотах.
Цю обставину враховує дійсна організаційна структура радіотехнічних з’єднань.
Радіолокаційне поле по кратності перекриття може бути однократним, двократним і т.д.
Кількісно кратність перекриття характеризується коефіцієнтом перекриття (Кп), який показує кількість зон РЛІ підрозділів угрупування, що взаємо перекриваються в певній точці повітряного простору.
За критерієм вартість/ефективність найоптимальнішим є Кп = 3.
Якщо імовірність виявлення цілі і-м підрозділом РВi=0,5, то при Кп=2,3,4,5 результуюча імовірність буде рівною 0,75; 0,875; 0,94; 0,97.
За критерієм неперервності РЛП підрозділяється на суцільне та осередкове.
Суцільне РЛП - це область повітряного простору, в будь-якій точці якого забезпечується виявлення, безперервне супроводження та визначення характеристик цілей в кожний даний момент часу хоч би одним підрозділом угрупування.
Допустимі розриви в суцільному РЛП при заданій дискретності оновлення інформації задовольняє умову
Lроз ≤ Vцtд;
Крім просторової структури РЛ поле має визначену частотну структуру - однодіапазонну чи багатодіапазонну.
Багатодіапазонне поле має більшу перешкодостійкість та дозволяє більш повно враховувати умови поширення хвиль різних діапазонів.
На практиці в РТВ частіше всього формується тридіапазонне поле станціями метрового, дециметрового та сантиметрового діапазонів.
Третє питання: Характеристика та властивості радіолокаційного поля.
Розміри та форма РЛП характеризуються показниками, які називаються параметрами.
До параметрів поля активної локації відносяться:
а) межа суцільного РЛП на заданій висоті;
б) висота нижньої межі суцільного РЛП;
в) висота верхньої межі суцільного РЛП.
Ці параметри використовуються під час оцінки бойових можливостей радіотехнічних частин і підрозділів.
Межа РЛП на даній висоті - це замкнута лінія, яка може бути одержана при перетині поля уявною поверхнею, що рівновідстоїть від поверхні землі у всіх своїх точках.
Межі суцільного РЛП наносяться на карти командирів частин та підрозділів.
Розміри суцільного РЛП в завданих межах можуть бути кількісно оцінені його площею на висоті нижньої межі, якщо підрозділи угрупування розміщені в вершинах кутів рівносторонніх трикутників (по ідеальній схемі)
Sрлп=2,6nDo2 (км2)
де: 2,6 - постійний коефіцієнт визначення площі вписаного шестикутника;
n - число підрозділів, що беруть участь в створенні РЛП,
Dо - дальність виявлення типової РЛС.
Висота нижньої (верхньої) межі РЛП - мінімальна (максимальна) висота, відрахована від рельєфу місцевості (від рівня моря), на якій забезпечується виявлення та безперервне супроводження повітряних цілей, хоча б одним підрозділом угрупування в кожен даний момент часу.
Висоти нижньої та верхньої меж суцільного РЛП залежать від рельєфу місцевості, висот позицій підрозділів, складу, кількості та технічних характеристик РЛС, задіяних для формування поля.
При розгляді верхньої межі суцільного РЛП потрібно враховувати, що на великих висотах в зонах видимості РЛК (РЛС) утворюються так названі мертві воронки.
Їх розміри залежать від максимального кута місця діаграми направленості РЛС (εmax), при якому не можливе виявлення цілей, для кожного типу РЛК (РЛС).
Величина мертвої воронки РЛС оцінюється радіусом її дії(Rмв).
Rмв = Нцctg εmax
Через це для формування верхнього ярусу поля радіотехнічні підрозділи розміщують на такій відстані, щоб мертві воронки сусідніх підрозділів взаємно перекривались.

Зоною тріангуляції називається область повітряного простору, в межах якої забезпечується визначення просторового положення ПАП двома рознесеними на місцевості пеленгуючими підрозділами.
Розміри та конфігурація перетину зони тріангуляції залежить від величини бази (dпел) та точності виявлення координат ПАП.
Допустима на практиці точність тріангуляції досягається при кутах перетину пеленгів не менше 45° та не більше 135°. Найбільша точність досягається при умові, що відстань від постановників перешкод
RПАП=0,7dпел
і кут між пеленгами дорівнює 90°-110°.
Через це завжди необхідно вибирати оптимальну з точки зору орієнтування на ПАП, пару підрозділів при супроводжуванні ПАП з урахуванням його маршруту польоту.
Крім того, точність вирішення тріангуляційної задачі залежить від одночасності пеленгації ПАП та автоматизованої обробки пеленгів.
При супроводжуванні кількох ПАП, окрім дійсних перетинів пеленгів утворюються хибні пеленги.
Кількість хибних перетинів пеленгів при використанні інформації двох пеленгуючих підрозділів зв’язано з кількістю супроводжуваних ПАП відношенням
Sxп = S(S-1),
де S - кількість ПАП, що супроводжується.
Імовірність того, що в точці перетину заходяться кілька ПАП, рівна величині, оберненій числу ПАП в зоні тріангуляції
Р=1/S.
Для збільшення певності виявлення дійсного місця знаходження ПАП на практиці використовується інформація від трьох пеленгуючих підрозділів.
Третій підрозділ дозволяє відсіювати хибні перетини. Три підрозділи формують поле тріангуляції, що являє собою область простору, в кожній точці якого забезпечується пеленгація ПАП трьома підрозділами одночасно.
Основною умовою формування поля тріангуляції є:
наявність у всіх пеленгуючих підрозділів РЛС одного діапазону;
можливість збору, обробки пеленгуючої інформації підрозділів на одному КП;
орієнтування поля тріангуляції в напрямку очікуваних дій ПАП;
відповідність бази між пеленгуючими підрозділами межі поля, що вимагається, на висоті польоту ПАП.
Взаємне торкання чи перекриття полів тріангуляції забезпечує створення суцільного поля тріангуляції цього угрупування.
Поле тріангуляції може бути суцільним чи осередковим.
Суцільне поле тріангуляції – це область простору, в якій забезпечується виявлення та безперервне супроводження ПАП чи інших цілей.
Воно характеризується:
границею поля тріангуляції на даній висоті і є замкнутою лінією, що описує зовнішню межу полів тріангуляції на тій же висоті;
висотою нижньої межі зони тріангуляції, яка називається мінімальна висота, відрахована від рельєфу місцевості, на якій забезпечується безперервна тріангуляція ПАП хоча б одним тріангуляційним елементом в кожний даний момент часу.
Висота верхньої границі тріангуляції називається максимальна висота, відрахована від рівня моря, на якій забезпечується безперервна тріангуляція ПАП хоч би одним тріангуляційним елементом в кожний даний момент часу.
Таким чином параметри радіолокаційного поля як активної так і пасивної локації - важливі характеристики, які використовуються для тактичних розрахунків бойових можливостей радіотехнічних підрозділів.
Дисципліна: Тактика РТВ ПC
Тема № 3 Основи бойового застосування підрозділів РТВ
Заняття 4 Бойові можливості радіотехнічних підрозділів і вимоги до них
Навчальні питання :