

В проекциях на координатные оси это равенство принимает вид
 (6.12)
(6.12)
Равенства (6.12) показывают, что проекции импульса равнодействующей на любую ось равна алгебраической сумме проекций импульсов составляющих сил на ту же ось.
3. Теорема об изменении количества движения
материальной точки и механической системы
Теорема об изменении количества движения материальной точки. Количеством движения материальной точки называется вектор, имеющий направление вектора скорости, и модуль, равный произведению массы точки m на модуль скорости ее движения v (рис. 6.5). Количество движения, зависящее от массы точки и ее скорости, является мерой механического движения. Понятие количества движения было введено в механику Декартом и положено в основу механики Ньютоном.
Единицей
количества движения является количество
движения точки, имеющей единицу массы
и движущейся со скоростью, равной единице
скорости, т.е. в системе МКС
![]() ,
в системе СГС
,
в системе СГС
![]() и в системе МКГСС
и в системе МКГСС
![]() .
Единицы количества движения совпадают
с единицами импульса силы. Проекции
количества движения
.
Единицы количества движения совпадают
с единицами импульса силы. Проекции
количества движения
![]() на оси x,y,z
определяются следующими выражениями:
на оси x,y,z
определяются следующими выражениями:
![]() ,
(6.13)
,
(6.13)
где
![]() - проекции скорости на оси координат.
- проекции скорости на оси координат.
Предположим, что - равнодействующая сил, приложенных к материальной точке. Преобразуем основное уравнение динамики следующим образом:
![]() .
(6.14)
.
(6.14)
Уравнение (6.14) выражает теорему об изменении количества движения материальной точки в дифференциальной форме, которая формулируется так: производная по времени от количества движения материальной точки геометрически равна равнодействующей сил, приложенных к этой точке. Установим зависимость между изменением количества движения и импульсами действующих на точку сил.
Из уравнения (6.14)
![]() .
(6.15)
.
(6.15)
Проинтегрируем обе части равенства в пределах, соответствующих моментам времени t1 и t2:
 .
.
Так как правая часть этого равенства представляет собой импульс силы за промежуток времени t2-t1 (7), то
![]() .
(6.16)
.
(6.16)
Из равенства (6.16)
![]() ,
,
т.е.
вектор
![]() можно определить диагональю параллелограмма,
построенного на векторах
можно определить диагональю параллелограмма,
построенного на векторах
![]() и
(рис. 6.6). Заменим импульс
равнодействующей силы
в уравнении (6.16) импульсами
и
(рис. 6.6). Заменим импульс
равнодействующей силы
в уравнении (6.16) импульсами
![]() составляющих сил
составляющих сил
![]() :
:
![]() ,
,
или
![]() .
(6.17)
.
(6.17)
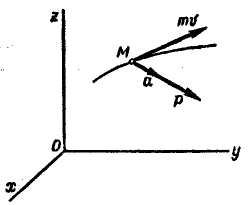
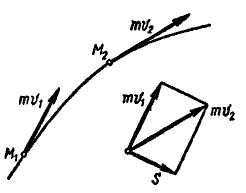
Рис. 6.5 Рис. 6.6
Уравнение (6.17) выражает теорему об изменении количества движения материальной точки в конечной форме: изменение количестве движения материальной точки за некоторый промежуток времени равно геометрической сумме импульсов cил, приложенных к точке за тот же промежуток времени. Эту теорему называют также теоремой импульсов,
Векторному уравнению (6.17) соответствуют три уравнения в проекциях на оси координат:
или
 (6.18)
(6.18)
Уравнения (6.18) показывают, что изменение проекции количества движения материальной точки на данную ось за некоторый промежуток времени равно сумме проекций на ту же ось импульсов приложенных к точке сил за тот же промежуток времени.
Большинство практических задач решается по уравнениям в проекциях на оси кoopдинат.
Теорема об изменении количества движения механической системы. Количеством движения механической системы называется вектор, равный геометрической сумме (главному вектору) количеств движения всех материальных точек этой системы.
Если
отдельная точка системы Мi
имеет массу mi
и скорость
![]() ,
то вектор количества движения системы
,
то вектор количества движения системы
![]()
![]() .
(6.19)
.
(6.19)
Преобразуем выражение (6.19):
![]() .
.
Так как согласно (6.1)
![]() ,
,
то
![]() ,
,
т. e.
![]() .
(6.20)
.
(6.20)
Выражение (6.20) показывает, что вектор количества движения механической системы имеет модуль, равный произведению массы системы на скорость ее центра масс и направление этой скорости.
Проецируем
вектор
![]() на оси координат:
на оси координат:
 (6.21)
(6.21)
Проекция количества движения механической системы на каждую координатную ось, равная сумме проекции количеств движения всех точек системы на эту ось, определяется произведением массы системы на проекцию скорости центра масс на эту же ось. Дифференцируем (6.20) по времени:
![]() .
.
Согласно уравнению (6.3) движения центра масс системы,
![]() .
.
Следовательно,
![]() .
(6.22)
.
(6.22)
Уравнение (6.22) выражает теорему об изменении количества движения механической системы в дифференциальной форме: производная по времени от количества движения механической системы геометрически равна главному вектору внешних cuл, действующих на эту систему.
Векторному уравнению (6.22) соответствуют три уравнения в проекциях на оси координат:
![]() .
(6.23)
.
(6.23)
Уравнения (6.23) показывают, что производная по времени от проекции количества движения механической системы на любую ось равна проекции главного вектора внешних cuл, действующих на систему, на ту же ось.
Иэ уравнений (6.22) или (6.23) следует, что изменение количества движения механической системы вызывается только внешними силами.
Следствия
из теоремы.
1. Если главный
вектор внешних сил за рассматриваемый
промежуток времени равен нулю, то
количество движения механической
системы постоянно. Из
уравнения (6.22) следует, что если
=
0, то
![]() =
0, т. е.
=
0, т. е.
![]() .
(6.24)
.
(6.24)
2. Если проекция главного вектора внешних сил на какую-либо ось за рассматриваемый промежуток времени равна нулю, то проекция количества движения механической системы на эту ось постоянна.
Так, например, при ХЕ= 0 из первого уравнения (6.23)
![]() ,
,
откуда
![]() .
(6.25)
.
(6.25)
Следствия из теорем об изменении количества движения механической системы выражают закон сохранения количества движения системы.
Так
как уравнения (6.22) и (6.23) тесно связаны
с уравнениями (3) и (4), определяющими
движение центра масс системы, то формулы
(24) и (25) можно иллюстрировать некоторыми
примерами. Так, например, пренебрегая
внешними силами, действующими на
Солнечную систему, можно заключить, что
количество движения этой системы
![]() постоянно и ее центр масс движется
прямолинейно и равномерно. Откат орудия
при выстреле по горизонтальному
направлению обусловлен тем, что проекция
количества движения системы орудие —
снаряд на горизонтальную ось х
не изменяется при отсутствии горизонтальных
внешних сил, т. е, по формуле (6.25) имеем
постоянно и ее центр масс движется
прямолинейно и равномерно. Откат орудия
при выстреле по горизонтальному
направлению обусловлен тем, что проекция
количества движения системы орудие —
снаряд на горизонтальную ось х
не изменяется при отсутствии горизонтальных
внешних сил, т. е, по формуле (6.25) имеем
.
Как до выстрела, так к после него Кх = 0. Отсюда можно определить скорость отката орудия:
![]() ,
,
где
![]() - масса и скорость вылета снаряда;
- масса и скорость вылета снаряда;
![]() - масса и
скорость
отката
орудия.
- масса и
скорость
отката
орудия.
Скорость отката орудия определятся ее проекцией:
![]() .
.
Установим теперь зависимость между изменением количества движения механической системы и импульсами действующих на эту систему сил. Разделим силы, приложенные к точкам механической системы, на внешние силы и внутренние силы . Определим изменение количества движения каждой точки системы за промежуток времени t2-t1 по уравнению (6.17):
![]() .
.
где
![]() и
и
![]() - импульсы
внешних
и внутренних
сил,
действующих на точку Мi
в промежутке t2-t1.
Суммируем левые и правые части
составленных n
равенств:
- импульсы
внешних
и внутренних
сил,
действующих на точку Мi
в промежутке t2-t1.
Суммируем левые и правые части
составленных n
равенств:
![]() .
.
Так
как главный вектор внутренних сил,
действующих на механическую систему,
равен нулю, то и геометрическая сумма
импульсов внутренних сил равна нулю,
т. е.
![]() =
0. Тогда
=
0. Тогда
![]() ,
,
или
![]() .
(6.26)
.
(6.26)
Уравнение (6.26) выражает теорему об изменении количества движения механической системы в конечной форме, или теорему импульсов: изменение количества движения механической системы за некоторый промежуток времени равно геометрической сумме импульсов внешних сил, приложенных к системе, за тот же промежуток времени.
Векторному уравнению (6.26) соответствуют три уравнения в проекциях на оси координат:
![]() (6.27)
(6.27)
Уравнения (6.27) показывают, что изменение проекции количества движения механической системы на любую ось равно сумме проекций импульсов всех внешних сил, действующих на систему на ту же ось.
При решении задач обычно пользуются уравнениями (6.27). Эти уравнения, так же как и уравнения (6.23), не содержат внутренних сил, что имеет большое практическое значение.
Лекция 7
ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВА
ДВИЖЕНИИ МАТЕРИАЛЬНОЙ ТОЧКИ И МЕХАНИЧЕСКОЙ
СИСТЕМЫ
Моменты количества движения точки
относительно центра и оси.
В
предыдущих лекциях введены и широко
использованы понятия моментов силы
относительно точки и относительно оси.
Так как количество движения материальной
точки
![]() является вектором, то можно определить
его моменты относительно центра и
относительно оси таким же путем, как
определяются моменты силы.
является вектором, то можно определить
его моменты относительно центра и
относительно оси таким же путем, как
определяются моменты силы.

Рис. 7.1
Момент
количества движения
точки М относительно центра О
(рис. 7.1, а)
представляет
собой вектор
![]() ,
направленный перпендикулярно
плоскости, проходящей через вектор
и центр О в ту сторону, откуда вектор
относительно центра О виден направленным
против вращения часовой стрелки.
Модуль вектора
равен произведению величины тv
на плечo
h
вектора
относительно центра О:
,
направленный перпендикулярно
плоскости, проходящей через вектор
и центр О в ту сторону, откуда вектор
относительно центра О виден направленным
против вращения часовой стрелки.
Модуль вектора
равен произведению величины тv
на плечo
h
вектора
относительно центра О:
![]() .
(7.1)
.
(7.1)
Момент
количества движения
![]() можно определить векторным произведением
радиуса-вектора
можно определить векторным произведением
радиуса-вектора
![]() ,
проведенного из центра О
в точку М,
на вектор количества движения
:
,
проведенного из центра О
в точку М,
на вектор количества движения
:
![]() .
(7.2)
.
(7.2)
Момент
![]() количества движения
точки М относительно оси
z
(рис. 7.1, б)
равен взятому
со знаком плюс или минус произведению
проекции вектора
на плоскость I,
перпендикулярную оси z,
на плечо этой проекции относительно
точки О пересечения оси z
с плоскостью I:
количества движения
точки М относительно оси
z
(рис. 7.1, б)
равен взятому
со знаком плюс или минус произведению
проекции вектора
на плоскость I,
перпендикулярную оси z,
на плечо этой проекции относительно
точки О пересечения оси z
с плоскостью I:
![]() ;
(7.3)
;
(7.3)
причем
![]() ,
если, смотря навстречу оси z,
можно видеть проекцию
,
если, смотря навстречу оси z,
можно видеть проекцию
![]() относительно точки О направленной
против вращения часовой стрелки и
относительно точки О направленной
против вращения часовой стрелки и
![]() — в обратном случае.
— в обратном случае.
Моменты количества движения точки относительно центра О и относительно оси z, проходящей через этот центр, связаны зависимостью
![]() ,
(7.4)
,
(7.4)
т.е. проекция момента количества движения материальной точки относительно некоторого центра на ось, проходящую через этот центр, равна моменту количества движения точки относительно этой оси. Аналитические выражения моментов количества движения точки относительно осей координат имеют вид
![]() (7.5)
(7.5)
где x, у, z — координаты движущейся точки М; — проекции скорости точки М на оси координат (рис. 7.1, в).
Теорема
об изменении момента количества движения
материальной точки. Предположим,
что движение материальной точки М
происходит под действием силы
(рис. 7.2).
Проведем из произвольного центра О
в точку М
радиус-вектор
![]() и определим момент силы
относительно этого центра по формуле
из статики:
и определим момент силы
относительно этого центра по формуле
из статики:
![]() .
.
Определим также момент количества движения точки М относительно центра О по формуле (7.2):
![]() .
.
Чтобы
установить зависимость между моментом
количества движения точки
и моментом силы
![]() ,
следует найти производную по времени
от момента количества движения:
,
следует найти производную по времени
от момента количества движения:
![]() .
.
Здесь
![]() .
.