

2. Структурная схема системы.
Структурная схема ЭСС, разработанная на основе ее функциональной схемы представлена на рис 2.
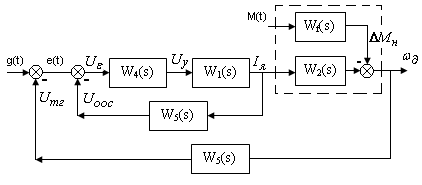
Рис. 2. Структурная схема ЭСС.
Причем:
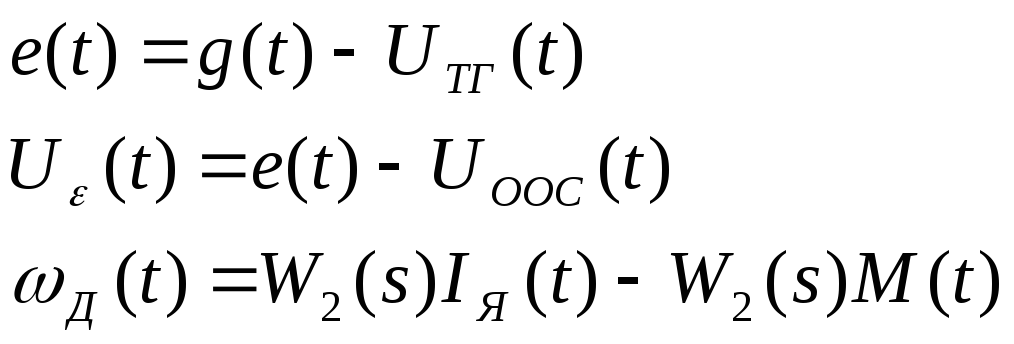
Знак
“-” в последней формуле отражает
уменьшение скорости
![]() при увеличении возмущающего воздействия
на исполнительном валу двигателя
при увеличении возмущающего воздействия
на исполнительном валу двигателя
Соответствующие передаточные функции, с учетом произвольного выбора параметров из заданных интервалов, сведены в табл. 1.
|
Элементы ЭСС |
Передаточные функции |
Размерность |
|
ЭМУ |
|
|
|
УПТ |
|
б/р |
|
ИД по управлению |
|
|
|
ИД по возмущению |
|
|
|
ТГ |
|
|
|
КУ |
|
Ом |
Параметры
![]() подлежат расчету на основе требований
предъявляемых к системе.
подлежат расчету на основе требований
предъявляемых к системе.
3. Требования, предъявляемые к эсс.
Проектируемая
следящая система создается для работы
при скоростях
![]() и максимальном возмущающем воздействии
и максимальном возмущающем воздействии![]() .
.
Требования, предъявляемые к системе классифицированы по категориям, и сведены в табл. 2.
|
Требования |
Параметр |
Величина |
|
Статические |
Статическая
ошибка стабилизации системы от
задающего воздействия (на максимальных
оборотах), |
|
|
Статическая
ошибка стабилизации системы от
возмущающего воздействия, |
| |
|
Суммарная
статическая ошибка стабилизации
системы (на максимальных оборотах),
|
| |
|
Динамические |
Перерегулирование,
|
|
|
Время
регулирования,
|
< 0.3сек. | |
|
Частотные |
Запас
по амплитуде,
|
|
|
Запас
по фазе,
|
| |
|
Чувствительность |
Сохранение
статических и динамических характеристик
при изменении параметров
|
|
4. Анализ исходной системы.
4.1 Определение общего вида передаточных функций системы.
Исходя из составленной выше структурной схемы ЭСС (рис. 2.), определим общий вид передаточных функций, системы и ее ошибки.
Для регулируемой величины y(t) и ошибкиe(t) можно записать:
![]()
где
![]() - передаточная функция внутреннего
контура системы.
- передаточная функция внутреннего
контура системы.
Решая совместно два этих уравнения, получаем для регулируемой величины y(t):
![]()
и для ошибки:
![]()
Также определим ПФ разомкнутого контура:
![]()
В представленных
выше формулах размерность регулируемой
величины![]() - [рад/с], а ошибки:
- [рад/с], а ошибки:![]() - [В].
- [В].
Из полученного выражения для регулируемой величины выделим передаточные функции замкнутого контура системы:
а)
![]() по заданию,
по заданию,
б)
![]() по
возмущению.
по
возмущению.
Соответственно для ошибки:
а)
![]() по заданию,
по заданию,
б)
![]() по
возмущению.
по
возмущению.
4.2 Расчет статического режима.
Поскольку местная
отрицательная обратная связь является
гибкой (не оказывает влияния на работу
системы в статическом режиме), это
позволяет перейти к расчету коэффициента
усиления
![]() УПТ, обеспечивающего заданный уровень
статической ошибки. Найдем ее из
полученного выше выражения:
УПТ, обеспечивающего заданный уровень
статической ошибки. Найдем ее из
полученного выше выражения:
![]()
Положим
s= 0,![]()
где
![]() 125.6
рад/с - максимально возможная скорость
движения исполнительного вала двигателя,
а
125.6
рад/с - максимально возможная скорость
движения исполнительного вала двигателя,
а![]() - максимально возможный момент сил
нагрузки.
- максимально возможный момент сил
нагрузки.
Поскольку
![]() ,
окончательно получаем:
,
окончательно получаем:
![]()
где К - коэффициент усиления разомкнутого контура,
Из этого соотношения
следует, что для обеспечения статической
ошибки, не хуже 5 об/мин, коэффициент
усиления должен быть не менее 49.23 дБ.
Выбрав суммарное усиление разомкнутого
контура 50 дБ (316 раз), окончательно получим
![]() ,
при этом система будет обеспечивать в
рабочем диапазоне следующие статические
ошибки:
,
при этом система будет обеспечивать в
рабочем диапазоне следующие статические
ошибки:
- по заданию -
![]()
- по возмущению -
![]()
- суммарная ошибка
-
![]()