

1.4. Сучасні супутникові навігаційні системи.
Через низку переваг супутникові радіонавігаційні системи отримали велике застосування в багатьох галузях науки і техніки.
В даний час працюють або готуються до розгортання наступні системи супутникової навігації:
— NAVSTAR GPS (англ. NAVigation Satellites providing Time And Range; Global Positioning System (читається Джі Пі Ес) — забезпечують вимір часу і відстані навігаційні супутники; глобальна система позиціонування) — супутникова система навігації, часто іменована GPS. Дозволяє в будь-якому місці Землі (включаючи приполярні області), майже при будь-якої погоди, а також в космічному просторі поблизу планети визначити місцеположення і швидкість об'єктів. Система розроблена, реалізована і експлуатується Міністерством оборони США.
Основний принцип використання системи — визначення місця розташування шляхом вимірювання відстаней до об'єкту від точок з відомими координатами — супутників. Відстань обчислюється за часом затримки розповсюдження сигналу від посилки його супутником до прийому антеною GPS-приймача. Тобто, для визначення тривимірних координат GPS-приймачу потрібно знати відстань до трьох супутників і час GPS системи. Таким чином, для визначення координат і висоти приймача, використовуються сигнали як мінімум з чотирьох супутників.
— Глобальна навігаційна супутникова система (ГЛОНАСС) — радянська і російська супутникова система навігації, розроблена на замовлення Міністерства оборони СРСР. Основою системи повинні бути 24 супутники, що рухаються над поверхнею Землі в трьох орбітальних площинах з нахилом орбітальних площин 64,8° і заввишки 19 100 км. Принцип вимірювання аналогічний американській системі навігації NAVSTAR GPS.
— Галілео (Galileo) — спільний проект супутникової системи навігації Європейського союзу і Європейського космічного агентства, є частиною транспортного проекту транс'європейські мережі (англ. Trans-European Networks). Система призначена для вирішення навігаційних завдань для будь-яких рухомих об'єктів з точністю менше одного метра.
Нині існуючі GPS-приймачі не зможуть приймати і обробляти сигнали з супутників Галілео, хоча досягнута домовленість про сумісність і взаємодоповнюваність з системою NAVSTAR GPS третього покоління.
— IRNSS (англ. Indian Regional Navigation Satellite System) — індійська регіональна навігаційна супутникова система, проект якої був остаточно прийнятий до реалізації урядом Індії. Бюджет проекту склав більше 300 мільйонів доларів. IRNSS буде забезпечувати лише регіональне покриття самої Індії і частин суміжних держав. Загальна кількість супутників системи IRNSS: 7. Проектна дата завершення робіт: 2011 рік. Поточний стан: перший супутник був запущений в 2008 році.
— Бейдоу (кит. 北斗 běidǒu, буквально — Північний Ківш, китайське назва сузір'я Великої Ведмедиці, скорочено — BD) — супутникова система навігації, створена Китаєм. На січень 2010 включала в себе 3 супутника, розташованих на геостаціонарній орбіті і забезпечувала визначення географічних координат в Китаї і на сусідніх територіях. Планується що система запрацює на повну потужність до 2020 року.
В даний час широко використовуються дві системи: GPS і ГЛОНАСС. Детальніше розглянемо їх принципи роботи і основні положення.
GPS — Global Posіtіonіng System. Паралельна назва NAVSTAR — Navіgatіon Satellіte Тіmіng and Rangіng. Розробки концепції початі в 1973 р. Запуск супутників першого блоку початий в 1978 р. В 1983 р. заговорили про цивільне застосування. Експлуатаційна готовність оголошена на початку 1995р.
ГЛОНАСС — Глобальна Навігаційна Супутникова Система. Розробки початі в середині 70-х років. В 1982 р. виведені перші її супутники серії космос . У вересні 1993 р. офіційно прийнята в експлуатацію МО РФ. У березні 1995 р. уряд РФ спеціальною постановою за N237 відкрила систему для цивільного застосування й міжнародного співробітництва. У січні 1996 р. ГЛОНАСС розгорнута повністю. В 1999 р. розпорядженням Президента РФ віднесена до космічної техніки подвійного призначення, застосовуваної в інтересах безпеки РФ й у цивільних цілях. Уже працюють приймальні пристрої, що одночасно використають й GPS і ГЛОНАСС.
Виділяють три головні сектори супутникових систем: наземного контролю й керування (НКК), сузір'я супутників (космічних апаратів - КА), апаратури користувачів (АП). Підсистема НКК складається зі станцій спостереження за КА, служби точного часу, головної станції з обчислювальним центром і станцій завантаження даних на борт КА. Супутники GPS проходять над контрольними пунктами двічі в добу. Зібрана інформація про орбіти обробляється й прогнозуються координати супутників (ефемериди). Ці й інші дані з наземних станцій завантажуються на борт кожного КА. GPS управляють головна станція на базі ВВС Колорадо-Спрінгс і наземні станції в Колорадоспрингс, на острові Піднесення, острові Диего-гарсия, атолі Кваджалейн, Гавайських островах й ін. (Shank, L.avгakas, 1994). Для уточнення ефемерид використаються результати вимірів на пунктах міжнародних глобальних мереж, наприклад, таких, як CІGNEТ й ІGS.
Підсистема КА складається з 24 основних й 3 резервних супутників (планується збільшити ще на 18 супутників). Кожен супутник має по кілька атомних еталонів частоти й часу, апаратури для прийому й передачі радіосигналів, бортові комп'ютерні апаратури. Розміри супутників з урахуванням панелей сонячних батарей більше 5 м. Вага супутника — 1 т. Розрахунковий час існування на орбіті 7-8 років. КА зберігає стабільним задане положення на орбіті, приймає й зберігає інформацію з наземних станцій, а також безупинно передає в апаратури користувачів вимірювальні радіосигнали, дані про точний час, свої координати й інші відомості.
У ГЛОНАСС також 24 основних й 3 резервних супутника. Маса апарата - 1,5т, його довжина близько 8 м, строк активного існування КА 3-5 років. Запуск супутників іде з космодрому Байконур. НКК включає З керування системою під Москвою (ЦУС), центральний синхронізатор (ЦС) з високоточним водневим стандартом частоти й часу для синхронізації системи, мережа на території РФ контрольних станцій (КС) — здійснюють сеанси траєкторних і тимчасових вимірів, збирають телеметричну інформацію про стан бортових систем, забезпечують закладку на супутники 1 або 2 рази в добу високоточних ефемерид і тимчасових виправлень; система контролю фаз (СКФ) для синхронізації фаз сигналів, випромінюваних всіма супутниками, і визначення зрушень бортових шкал часу; квантово-оптичні станції (КОС) для періодичного юстирування радіотехнічних каналів виміру дальностей; апаратури контролю поля (АКП) — являє собою апаратури користувачів, установлену на контрольних станціях, забезпечує контроль точності вимірів. НКУ здійснює з, нагромадження й обробку траєкторної і телеметричної інформації про всі супутники системи, формування й видачу на кожен супутник команд керування й навігаційної інформації, а також контроль за функціонуванням системи в цілому.
У системах супутникового позиціювання КА виконують роль геодезичних опорних пунктів. На кожен момент вимірів їхні координати повинні бути відомі. Координати об'єкта знаходять способом зарубок по вимірах за допомогою апаратури на супутниках і на землі. Обмірювані параметри визначають поверхні положення, у точці перетинання яких лежить шуканий об'єкт. У системі першого покоління ТRANSІТ на основі ефекту Доплера вимірювали різниці відстаней від приймача до двох положень супутника на орбіті. Поверхнями положень були гіперболоїди обертання. У сучасних системах вимірюють дальності до КА й швидкості змін дальностей внаслідок переміщень КА відносно користувача.
Обмірюваним швидкостям відповідають конічні поверхні положення (конуси), а обмірюваним дальностям — сферичні (сфери). У геодезичних цілях переважно користуються дальностями, по яких реалізують просторові лінійні зарубки (Рис. 1.5). Якщо з обумовленого пункту М виміряти відстані R1, R2, R3 до трьох супутників 1,2,3, провести з них як із центрів радіусами R1, R2, R3 сфери, то ці сфери перетнуться в крапці М и визначать її положення. Сфери перетнуться ще в одній крапці - М' (не показана на Рис. 1.5), однак крапки М и М' лежать по різні сторони площини "123" і зробити правильний вибір неважко.
У цьому полягає геометрична сутність завдання. Коли відомі координати супутників, завдання легко вирішити аналітично й обчислити координати пункту М.
Р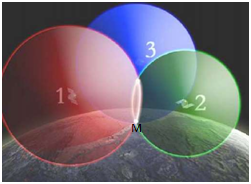 ис.1.5.
Лінійна просторова засічка: М - крапка
перетинання сфер із центрами 1,2,3 і
радіусами R1, R2, R3.
ис.1.5.
Лінійна просторова засічка: М - крапка
перетинання сфер із центрами 1,2,3 і
радіусами R1, R2, R3.
Дальності визначають за часом поширення радіохвилі від передавача на супутнику до приймача на Землі. Використаються два методи: кодовий і фазовий. Виміри виконуються в так називаному без запитальному режимі, коли передавач на супутнику працює безупинно, а супутниковий приймач включається тільки в міру потреби. У без запитальному режимі, щоб правильно визначити час поширення радіохвилі, шкали часу на супутнику й у приймачі повинні бути строго погоджені. На ділі такого узгодження шкал часу немає. Образно говорячи, годинники приймача не вивірені по годинниках супутників. Тому виміряються перекручені відстані. Їх називають псевдодальностями.
Псевдодальність відрізняється від щирої дальності на величину, пропорційну розбіжності шкал часу на супутнику й у приймачі користувача. Якщо відліки по всіх каналах даного приймача, що приймає сигнали від різних супутників, виробляються одночасно, то відмінність псевдодальності від дальності до будь-якого супутника, сигнали якого приймає приймач, буде однаковим. Ця відмінність може бути виключене після введення його в якості додаткового невідомого в рівняння місцеположення.
Тому, щоб правильно обчислити координати пункту по псевдодальностям, треба вимірювати не до двох або трьох, а до більшого числа супутників з відомими координатами. Крім того, як це прийнято в геодезії, завжди повинні бути надлишкові обмірювані величини. Надлишкові результати підвищують якість визначень, тому що забезпечують контроль і дозволяють виконувати обробку по методу найменших квадратів (МНК).