

2.4. Расширенный фильтр Калмана
В
случае параметрической неопределенности
модели сигнала образуем расширенный
вектор состояния
![]() ,
включив в него наряду с исходным вектором
состоянияY
вектор
неизвестных параметров .
Уравнение динамической системы (2.6)
представим в виде
,
включив в него наряду с исходным вектором
состоянияY
вектор
неизвестных параметров .
Уравнение динамической системы (2.6)
представим в виде
Yk+1 = Фk()Yk + Uk() +Wk. (2.19)
Считая неизвестные параметры постоянными во времени, дополним модель динамической системы (2.1) уравнением k+1 = k. Тогда для расширенного вектора состояния имеем уравнение состояния X k+1 = f [Xk , Uk ] + W k.
Это
уравнение нелинейно (исключение
составляет случай, когда от
зависит лишь член Uk()
в
(2.19) и эта зависимость линейна). В общем
случае решение задачи нелинейной
фильтрации достаточно сложно. Часто
приемлемое приближенное решение можно
получить, используя так называемые
линеаризованные фильтры [2,
c. 51-56].
В работе используется расширенный
фильтр Калмана, (линеаризованный фильтр,
в котором линеаризация на каждом шаге
производится в точке текущей оценки
![]() ).
Уравнения этого фильтра отличаются от
уравнений (2.8) - (2.14), помимо очевидной
замены обозначений (X
вместо
Y),
следующим:
).
Уравнения этого фильтра отличаются от
уравнений (2.8) - (2.14), помимо очевидной
замены обозначений (X
вместо
Y),
следующим:
1) уравнение экстраполяции оценки заменяется на уравнение
![]() ,
,
2)
в
уравнении экстраполяции ковариационной
матрицы ошибки оценки матрица Фk
заменяется на матрицу
![]() где
где
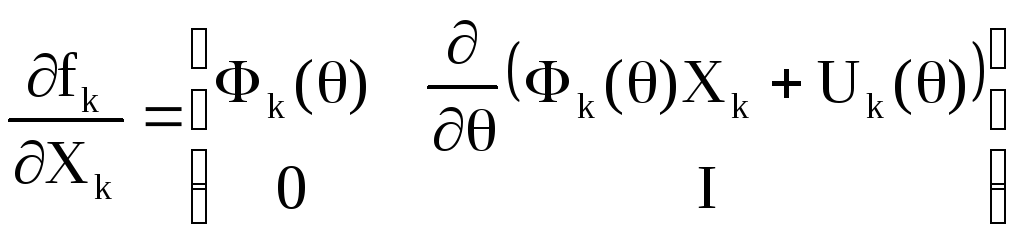 .
.
Отметим, что в некоторых случаях ошибки линеаризации могут существенно влиять на качество получаемых оценок и даже вызывать расходимость фильтра. Устранение этого нежелательного эффекта достигается с помощью введения параметра старения данных.
Алгоритм адаптивной фильтрации
Пусть
на интервале времени от T1
до T2
появляется импульсное входное воздействие
Uk,
неучтенное в модели сигнала. Моменты
T1,
T2
и
форма Uk
считаются неизвестными. В этом случае
в стандартном фильтре Калмана при tk
>
T1
будет наблюдаться ярко выраженный
эффект расходимости. Обеспечить
устойчивость процедуры фильтрации
можно, применив так называемые адаптивные
методы. С алгоритмами адаптивной
фильтрации можно ознакомиться в [2,
c. 68-73].
В настоящей лабораторной работе применен
адаптивный фильтр, в котором обнаружение
расходимости производится на основе
сравнения теоретической
![]() и фактической дисперсий невязок
измерений
и фактической дисперсий невязок
измерений![]() .
При этом фактическая дисперсия
аппроксимируется выборочной оценкой
.
При этом фактическая дисперсия
аппроксимируется выборочной оценкой![]() по последним М измерениям, включаяzk.
В нормальном режиме работы фильтра
проверяется соотношение
по последним М измерениям, включаяzk.
В нормальном режиме работы фильтра
проверяется соотношение
![]() .
Фильтр переводится в режим устранения
расходимости, как только обнаруживается
выполнение неравенства
.
Фильтр переводится в режим устранения
расходимости, как только обнаруживается
выполнение неравенства![]() .
После этого включается механизм
подавления расходимости, использующий
для загрубления модели сигнала эффектстарения
данных, описанный в 2.3. Однако здесь на
каждом шаге оценивания параметр старения
.
После этого включается механизм
подавления расходимости, использующий
для загрубления модели сигнала эффектстарения
данных, описанный в 2.3. Однако здесь на
каждом шаге оценивания параметр старения
![]() подбирается адаптивно (так, чтобы
обеспечить соответствие
подбирается адаптивно (так, чтобы
обеспечить соответствие![]() ):
):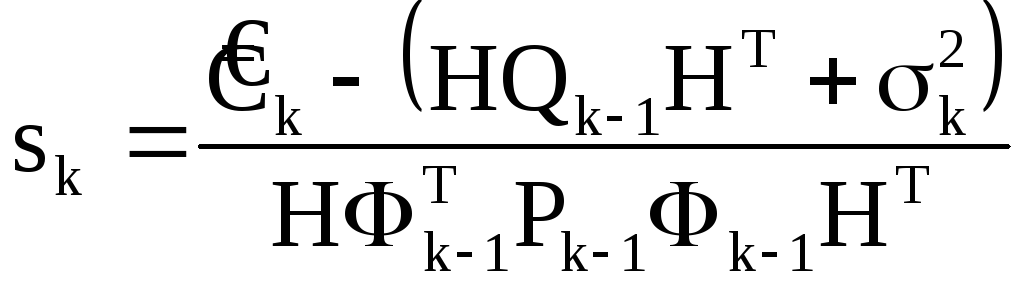 .
.
В
режиме устранения расходимости
проверяется неравенство
![]() .
Как только это неравенство перестает
выполняться, считается, что расходимость
устранена, после чего отключается
механизм подавления расходимости и
фильтр продолжает работу в нормальном
режиме. Параметрами описанного
адаптивного фильтра являются величиныM,
,
.
.
Как только это неравенство перестает
выполняться, считается, что расходимость
устранена, после чего отключается
механизм подавления расходимости и
фильтр продолжает работу в нормальном
режиме. Параметрами описанного
адаптивного фильтра являются величиныM,
,
.