

2. Классификация автоматических регуляторов
Автоматические регуляторы классифицируются по:
- способу действия,
- виду регулирующего воздействия,
- виду регулируемого параметра,
- цели и закону регулирования.
По способу действия различают регуляторы прямого и непрямого (косвенного) действия. В регуляторах прямого действия для перемещения регулирующего органа используется энергия самого объекта регулирования. Они применяются в тех случаях, когда для приведения в действие регулирующего органа не нужно больших усилий, а чувствительный элемент обладает необходимой для этого мощностью. В регуляторах непрямого действия энергия для перемещения регулирующего органа подводится от внешнего источника. По виду подводимой энергии регуляторы косвенного действия подразделяются на пневматические, электрические, гидравлические и комбинированные.
По виду регулирующего воздействия различают регуляторы непрерывного и прерывного (дискретного) действия. Регуляторами непрерывного действия называются такие, регулирующий орган которых при непрерывном изменении регулируемого параметра перемещается непрерывно. Регуляторами прерывного действия называются такие, у которых регулирующий орган перемещается только при достижении непрерывно изменяющимся регулируемым параметром определенных заданных значений. К ним относятся релейные и импульсные регуляторы.
По виду регулируемого параметра различают регуляторы температуры, давления, расхода, уровня и др. Конструкция этих регуляторов может быть самой разнообразной, но часто одна и та же конструкция применяется для регулирования различных параметров. Основное различие их заключается в конструкции чувствительного элемента. По цели регулирования различают регуляторы стабилизирующие, программные, следящие и оптимизирующие. Они различаются конструкцией задающего устройства. Стабилизирующие регуляторы имеют настройку на постоянную заданную величину, перенастройка на другой режим осуществляется вручную. Стабилизирующие регуляторы нашли широкое применение в пищевой промышленности. В программных регуляторах настройка меняется по заданной программе, определяемой ходом технологического процесса, при помощи специальных программных задатчиков.
В следящих регуляторах настройка изменяется произвольно по неизвестному заранее закону. Оптимизирующие регуляторы имеют специальное кибернетическое устройство, которое в зависимости от изменения внешних факторов вычисляет оптимальное значение регулируемого параметра и затем автоматически изменяет настройку на это оптимальное значение.
По закону регулирования различают регуляторы позиционные (Пз-регуляторы); пропорциональные, статические (П-регу-ляторы), интегральные, астатические (И-регуляторы); пропорционально-интегральные, изодромные (ПИ-регуляторы); пропорционально-дифференциальные (ПД-регуляторы); пропорционально-интегрально-дифференциальные, изодромные с предварением (ПИД-регуляторы). В зависимости от вида подводимой энергии регуляторы могут быть электрическими, пневматическими, гидравлическими и комбинированными.
3. РЕГУЛЯТОР ПРЯМОГО ДЕЙСТВИЯ.
Регуляторы прямого действия (рис. 5.5) служат для регулирования отдельных параметров. Они применяются в тех случаях, когда для приведения в действие регулирующего органа не нужно больших усилий и чувствительный элемент обладает необходимой для этого мощностью. Регуляторы прямого действия дешевы, просты по конструкции, надежны в эксплуатации и не требуют высокой квалификации обслуживающего персонала. Их область применения ограничивается простейшими объектами регулирования с благоприятными динамическими свойствами.
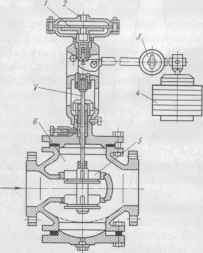
Рис. 5.5. Регулятор давления прямого действия
Регулятор давления прямого действия представляет собой мембранный клапан, регулирующий давление «после себя» (типа 25ч10нж) и «до себя» (типа 25ч12нж, РД, РДУК-2 и др.). Регуляторы давления «после себя» служат для регулирования давления среды за регулирующим клапаном. В регуляторах «до себя» импульс давления берется до клапана регулятора, где поддерживается постоянное давление.
Регулируемое давление (см. рис. 5.5.) по импульсной трубке через штуцер 2 передается в камеру давления, действует на мембрану 1 и создает усилие на шток клапана 7, которое сравнивается с противодействующим усилием грузов 3 и 4. При отклонении регулируемого давления от заданного значения результирующее усилие перемещает затвор 5, изменяя проходное сечение клапана 6 и регулирующее воздействие до тех пор, пока давление вновь не станет равным заданному. Тогда подвижная система регулятора возвратится в состояние равновесия. Масса груза определяет диапазон настройки регулятора. Регулятор применяется для работы с паром, газом, воздухом при давлении 1568 кПа и температуре до 300 °С.
4. ЭЛЕКТРИЧЕСКИЕ И ЭЛЕКТРОННЫЕ РЕГУЛЯТОРЫ.
Электрические и электронные регуляторы обладают:
- высокой надежностью,
-бесконтактностью элементов,
- значительным быстродействием,
- дальностью действия,
- универсальностью, что позволяет принимать сигналы от различных преобразователей с унифицированным выходом.
Их недостаток заключается в том, что их нельзя применять во взрыво- и пожароопасных, агрессивных окружающих средах.
Промышленностью выпускаются регуляторы систем МЗТА и ГСП «Каскад».
Электронные регуляторы Московского завода тепловой автоматики (МЗТА) предназначены для регулирования отдельных параметров различных технологических объектов. Регуляторы состоят из ряда унифицированных узлов и управляют электрическими и электрогидравлическими исполнительными механизмами. Для регулирования давления, уровня, расхода, температуры и других параметров, измеряемых первичными приборами (датчиками), применяют регуляторы Р25.1, Р25.2, Р25.3, которые заменили ранее выпускавшиеся приборы РПИБ.
Приборы регулирующие типа Р25 выполняют следующие функции: суммирование сигналов, поступающих от измерительных преобразователей с естественными электрическими выходными сигналами; введение информации о заданном значении регулируемой величины; формирование и усиление сигнала рассогласования; формирование на выходе электрических импульсов постоянного и переменного тока для управления исполнительными механизмами с постоянной скоростью перемещения; формирование совместно с исполнительными механизмами постоянной скорости ПИ- и ПИД-законов регулирования при подключении дифференциатора; преобразование сигнала от дифференциально-трансформаторного преобразователя положения исполнительного механизма в сигнал постоянного тока.
Принцип действия регулирующих приборов типа Р25 заключается в том, что сигнал, поступающий на электронный усилитель от датчика или соответствующего преобразователя, сравнивается с заданным сигналом от задатчика. В зависимости от величины рассогласования на выходе получается (отрабатывается) сигнал, изменяющийся по установленному закону регулирования. Сигнал подается на исполнительный механизм, заставляя его перемещаться. В зависимости от вида и номинального диапазона изменения входных сигналов регуляторы типа Р25 выпускаются в трех модификациях.