

18 Вопрос. Планирование в интерактивных системах
Циклическое планирование
В этом подразделе мы обратимся к некоторым характерным алгоритмам планирования. Одним из наиболее старых, простых, справедливых и часто используемых является алгоритм циклического планирования. Каждому процессу предоставляется некоторый интервал времени процессора, так называемый квант времени. Если к концу кванта времени процесс все еще работает, он прерывается, а управление передается другому процессу. Разумеется, если процесс блокируется или прекращает работу раньше, переход управления происходит в этот момент. Реализация циклического планирования проста. Планировщику нужно всего лишь поддерживать список процессов в состоянии готовности согласно рисунку 2.23, а. Когда процесс исчерпал свой лимит времени, он отправляется в конец списка (рис. 2.23, б).
 Рис.
2.23. Циклическое планирование: список
процессов в состоянии готовности (а);
список процессов в состоянии готовности
после того, как процесс S исчерпал
свой квант времени (б)
Рис.
2.23. Циклическое планирование: список
процессов в состоянии готовности (а);
список процессов в состоянии готовности
после того, как процесс S исчерпал
свой квант времени (б)
Приоритетное планирование
В циклическом алгоритме планирования есть важное допущение о том, что все процессы равнозначны. В ситуации компьютера с большим числом пользователей это может быть не так. Например, в университете прежде всего должны обслуживаться деканы, затем профессора, секретари, уборщицы и лишь потом студенты. Необходимость принимать во внимание подобные внешние факторы приводит к приоритетному планированию. Основная идея проста: каждому процессу присваивается приоритет, и управление передается готовому к работе процессу с самым высоким приоритетом.
Даже на персональном компьютере с одним пользователем может происходить несколько процессов, отдельные из которых являются более важными, чем другие. Демон, отвечающий за пересылку электронной почты в фоновом режиме, имеет более низкий приоритет, чем процесс, отображающий на экране видеофильм в реальном времени.
Чтобы предотвратить бесконечную работу процессов с высоким приоритетом, планировщик может уменьшать приоритет процесса с каждым тактом часов (то есть при каждом прерывании по таймеру). Если в результате приоритет текущего процесса окажется ниже, чем приоритет следующего процесса, произойдет переключение. Возможно предоставление каждому процессу максимального отрезка времени работы. Как только время кончилось, управление передается следующему но приоритету процессу.
Часто бывает удобно сгруппировать процессы в классы по приоритетам и использовать приоритетное планирование среди классов, но циклическое планирование внутри каждого класса. На рис. 2.24 представлена система с четырьмя классами приоритетов. Алгоритм планирования выглядит следующим образом: пока в классе 4 есть готовые к запуску процессы, они запускаются один за другим согласно алгоритму циклического планирования, и каждому отводится квант времени. При этом классы с более низким приоритетом не будут их беспокоить. Если в классе 4 нет готовых к запуску процессов, запускаются процессы класса 3 и т. д. Если приоритеты постоянны, до процессов класса 1 процессор может не дойти никогда.
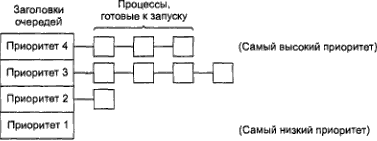 Рис.
2.24. Приоритетный алгоритм планирования
с четырьмя классами приоритетов
Рис.
2.24. Приоритетный алгоритм планирования
с четырьмя классами приоритетов