

Работа скц в режиме автосопровождения цели
В режим автосопровождения цели СКЦ переводится из режима электрического арретирования сигналом с автомата разарретирования и пуска (АРП) ПМ при положительных результатах анализа сигналов с ТГС.
Сигналом, несущим информацию об угловом рассогласовании оптической оси гироскопа с направлением на цель ΔЕ, является сигнал переменного тока с усилителя коррекции вида
Uε = Uε sin(ωгt + μц)
где Uε - амлитудное значение сигнала коррекции, пропорциональное ошибке рассогласования ΔЕ;
ωг - частота вращения ротора гироскопа относительно земной системы координат;
μц - фаза сигнала, характеризующая плоскость рассогласования.
Для обеспечения прецессии гироскопа в направлении отработки ошибки рассогласования к нему необходимо приложить внешний момент Мвн (рис. 13). Основное свойство трехстепенного гироскопа можно сформулировать следующим образом. Если к гироскопу приложить внешний момент Мвн, то ротор гироскопа начнет прецессировать в направлении наикратчайшего совмещения вектора кинетического момента ротора Мг с моментом внешних сил Мвн.
Кинетический момент ротора гироскопа характеризует инерционные свойства ротора при вращательном движении и численно равен
Нхг = Iхг ∙ ωхг
где Iхг - момент инерции ротора гироскопа;
ωхг - вектор угловой скорости вращения ротора гироскопа относительно оси ОХ.
Тогда основное свойство гироскопа можно записать в виде векторного произведения
Мвн = ωпр ∙ Нхг
где ωпр – угловая скорость прецессии относительно оси ОУ (ωпр = ωуг).
Направление перемещения оптической оси ротора гироскопа определяется по правилу трех пальцев правой руки (Рис.13), выражающего математическую запись векторного произведения.
Из рис. 13 и основного свойства трёхстепенного гироскопа следует, что для отработки ошибки рассогласования внешний момент должен находиться в плоскости угла рассогласования.
Для создания внешнего момента в гироскопическом приводе следящей системы используется взаимодействие магнитного поля постоянного магнита ротора гироскопа с магнитным полем катушки коррекции (рис. 14).
При протекании через катушку коррекции тока от сигнал с усилителя коррекции в катушке наводится переменное магнитное поле, которое при взаимодействии с полем постоянная магнита ротора гироскопа создает внешний момент равный
Мвн = m ∙hкк
где m - вектор магнитного момента постоянного магнита ротора гироскопа, направленный вдоль линии раздела полюсов магнита от южного полюса к северному;
hкк - вектор напряженности магнитного поля катушки коррекции, направленный вдоль продольной оси в ту или другую сторону.
Под действием внешнего момента ротор гироскопа процессирует в сторону уменьшения ошибки рассогласования.
Передаточная функция по ошибке СКЦ определяется выражением
Ea(p) Kэб Kкк Kг Ко
W(p) = ------- = ----------------- = -----
ΔΕ(p) Р Р
где Ко = Kэб Kкк Kг - коэффициент передачи СКЦ.
Переходя отсюда к оригиналу будем иметь Ел(t) = Ко: ΔΕ(t),
т.е. угловая скорость перемещения оси координатора цели пропорциональна ошибке рассогласования.
Для получения напряжения с информацией об угловой скорости линии визирования Ел между усилителем коррекции и катушкой коррекций установлены активные сопротивления, на которых падение напряжения будет пропорционально току катушке коррекции. Это напряжение вида
Uεл = Uεл sin(ωгt + μц)
поступает в УВК.
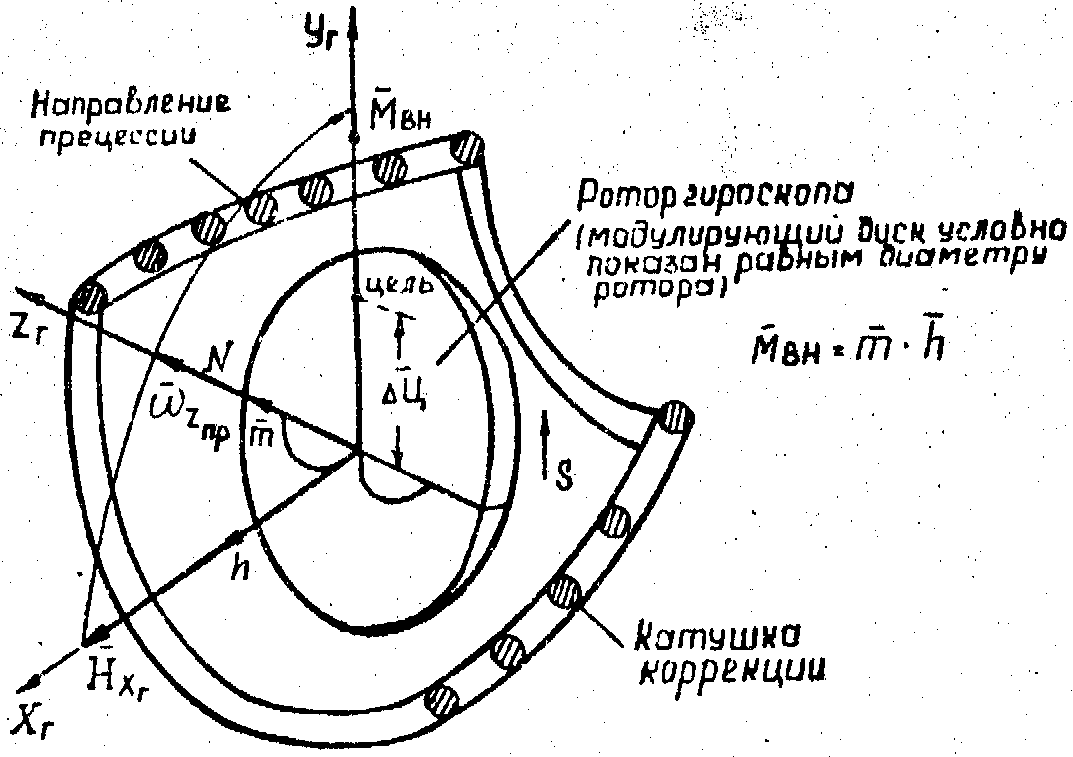
Рис.14. Образование внешнего момента в результате взаимодействия магнитных полей катушки коррекции с постоянным магнитом ротора гироскопа
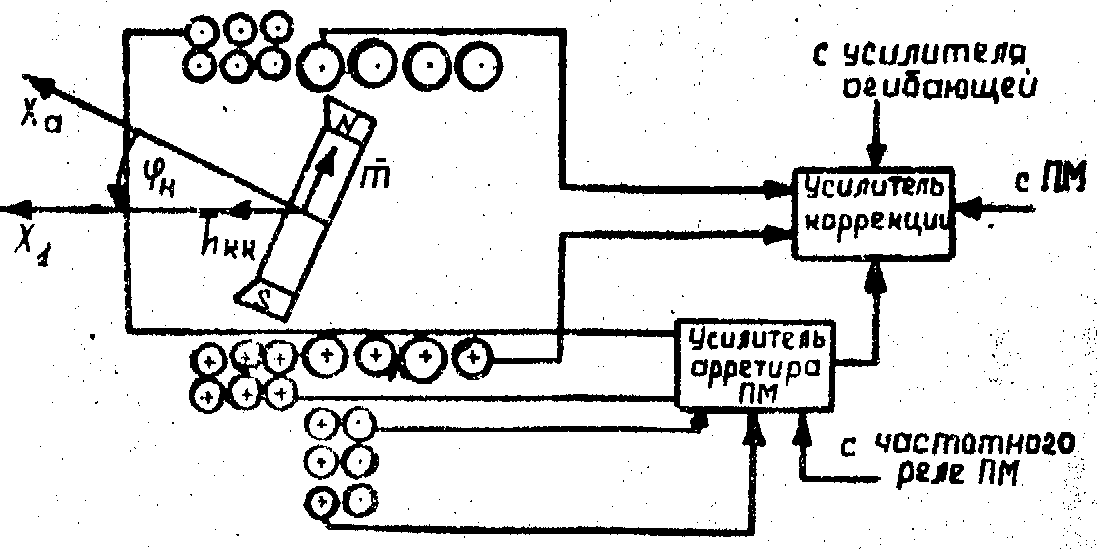
Рис. 15. Принцип работы системы электрического арретирования
Работа СКЦ в режиме электрического арретирования.
Система электрического арретирования обеспечивает совмещение оптической оси гироскопа с продольной осью ракеты при разгоне ротора гироскопа и с линией прицеливания, которая заклонена в вертикальной плоскости вниз на 10° относительно продольной оси ракеты и трубы, после окончания разгона и нажатия на пусковой крючок ПМ.
В качестве измерительного элемента ошибки арретирования (φn) используются катушка пеленга координатора ТГС и обмотка заклона трубы (рис. 15).
Ось катушки пеленга совпадает с продольной осью ракеты и если плоскость вращения полюсов магнита ротора гироскопа совпадает с плоскостью катушки пеленга (φn = 0), то сигнал с катушки пеленга равен нулю. В случае отклонения оптической оси гироскопа на некоторый угол от продольной осе ракеты (φn ≠ 0) с катушки пеленга снимается сигнал на частоте вращения ротора гироскопа ωг, амплитуда и фаза которого однозначно характеризуют величину и направление ошибки арретирования.
Ось обмотки заклона находится в вертикальной плоскости и перпендикулярна продольной оси ракеты. Величина сигнала наводимого в обмотке заклона в процессе прицеливания, практически неизменна и соответствует заданному углу пеленга в вертикальной плоскости (φn = -10°).
При отсутствии с частотного реле ПМ сигнала об окончании разгона ротора гироскопа на усилитель коррекции через усилитель арретира ПМ поступает сигнал с катушки пеленга. В катушке коррекции возникает момент коррекции, под действием которого гироскоп прецессирует в сторону уменьшения ошибки арретирования.
После окончания разгона ротора гироскопа усилитель арретира ПМ усиливает разностный сигнал с катушки пеленга и обмотки заклона, который после усиления по мощности в усилителе коррекции поступает на катушку коррекции, вызывая прецессию гироскопа в вертикальной плоскости до тех пор, пока разностный сигнал не станет равный нулю. При этом оптическая ось гироскопа будет совмещена с линией прицеливания.
При переводе СКЦ в режим автосопровождения цели к усилителю коррекции вместо усилителя арретира ПМ подключается усилитель огибающей, сигнал с которого пропорционален ошибке слежения.