

6. 3 *. Определение динамических реакций подшипников при вращении твердого тела вокруг неподвижной оси
Пусть
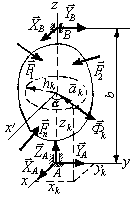
на твердое тело, вращающееся вокруг оси
АВ (рис. 6.5) с постоянной угловой
скоростью ω, действует система сил (![]() )
главный вектор которой равен
,
а главный момент относительно точки А
равен
)
главный вектор которой равен
,
а главный момент относительно точки А
равен
![]()
 .
.
Так как вращение
равномерное, то проекция главного
момента на ось вращения равна нулю
![]() =
0 и, следователь-но,
=
0 и, следователь-но,
![]() лежит в плоскости Аху. Определим
реакции подшипника В и подпятника
А.
лежит в плоскости Аху. Определим
реакции подшипника В и подпятника
А.
Рис. 6.5 Для этого мысленно отбросим связи, заменив их реакциями
(![]() ).
).
Приложим к каждой
точке тела силу инерции
![]() ,
ввиду равномерности вращения (ε
= 0) равную Фk=mkω2hk,
и составим уравнения равновесия
полученной системы сил:
,
ввиду равномерности вращения (ε
= 0) равную Фk=mkω2hk,
и составим уравнения равновесия
полученной системы сил:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Так как Фkх = mkω2hk,cosα = mkω2хk и
Фkу = mkω2hk,sinα = mkω2уk,
то
![]()
![]()
![]()
![]()
где хС, уС — координаты центра масс тела, Jyz, Jzx — центробежные моменты инерции тела. Динамические реакции находятся из уравнений
ХА+ХВ= - Rx - Mω2 xC, YA + Y В= - Ry - Mω2 yC,
ZA= - Rz, YBb = Mz - ω2 Jyz, ХBb = - My - Jxz (6.11)
и будут отличаться от статических реакций, которые получаются из этих же уравнений при ω= 0.
Для того, чтобы вращение не вызывало дополнительных нагрузок на подшипники, должны выполняться условия
xC= 0, уC = 0, Jyz=0, Jxz = 0 , (6.12)
означающие, что:
1) центр масс тела должен лежать на оси вращения;
2) ось вращения должна быть главной осью инерции в точке А, то есть с учетом первого условия ось вращения должна быть главной центральной осью инерции тела.
Этот же вывод справедлив и для неравномерного вращения. Проблема ликвидации дополнительных динамических реакций в подшипниках вращающихся частей и деталей машин до сегодняшнего дня остается одной из важнейших в машиностроении.
6.4*. Общее уравнение динамики
Как было показано, принцип Даламбера позволяет записывать динамические уравнения движения в виде уравнений равновесия, так как при добавлении сил инерции к активным силам и силам реакций связей, действующим на систему, получается уравновешенная система сил. Но если система сил уравновешена, то к ней применим принцип возможных перемещений. Применение этих принципов к движущейся механической системе, на которую наложены идеальные стационарные голономные удерживающие связи, позволяет сформулировать принцип Даламбера—Лагранжа: Если к движущейся механической системе, на которую наложены идеальные стационарные голономные удерживающие связи, условно приложить силы инерции всех ее точек, то в каждый момент времени сумма элементарных работ активных сил и сил инерции равна нулю на любом возможном перемещении системы, то есть
![]() ,
или
,
или
![]() ,
(6.13)
,
(6.13)
или
![]() Действительно,
умножив каждое из равенств (6.3), выражающих
принцип Даламбера для системы материальных
точек, на
,
получим
Действительно,
умножив каждое из равенств (6.3), выражающих
принцип Даламбера для системы материальных
точек, на
,
получим
![]() ,
( k=1,2,...,
n).
,
( k=1,2,...,
n).
Просуммируем эти равенства по всем точкам системы:
![]() .
(6.14)
.
(6.14)
Но при идеальных
связях
![]() ,
и поэтому окончательно получаем
,
и поэтому окончательно получаем
![]() ,
(6.15)
,
(6.15)
что и требовалось доказать.
Равенство (6.15), выражающее принцип Даламбера — Лагранжа, называется общим уравнением динамики.
Общее уравнение динамики применяется при составлении дифференциальных уравнений движения системы материальных точек с одной или несколькими степенями свободы.
П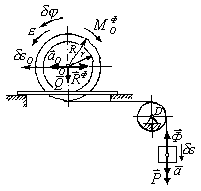 ример.
Груз А
массой т1,
который подвешен на невесомой
нерастяжимой нити, переброшенной через
невесомый блок D
и намотанной на шкив В
радиусом R,
заставляет связанный со шкивом вал
радиусом r
катиться
без скольжения по горизонтальному
рельсу (рис. 142). Общая масса шкива и
вала равна т2,
их радиус инерции относительно
центральной оси равен ρ.
Найти ускорение груза А.
ример.
Груз А
массой т1,
который подвешен на невесомой
нерастяжимой нити, переброшенной через
невесомый блок D
и намотанной на шкив В
радиусом R,
заставляет связанный со шкивом вал
радиусом r
катиться
без скольжения по горизонтальному
рельсу (рис. 142). Общая масса шкива и
вала равна т2,
их радиус инерции относительно
центральной оси равен ρ.
Найти ускорение груза А.
Решение.
Связи, наложенные на систему, являются
идеальными, поэтому приложим к системе
только активные силы (![]() ,
,
![]() ),
и силы инерции (
),
и силы инерции (![]() ).
).
Рис. 6.6 При этом
Ф
= m1а,
RФ=
m2аО,
![]()
Так как из кинематики механизма следует, что
ω = vА/(R - r), vО = ωr = vАr/(R-r),
то aO=ar/(R -r) и выражения для сил инерции и их момента примут вид
![]() ,
,
![]()
Дадим
системе возможное перемещение (![]() )
и подсчитаем на нем сумму возможных
работ:
)
и подсчитаем на нем сумму возможных
работ:
![]()
Из кинематики следует, что и поэтому
Сократив на δs, окончательно получим
 .
.