

5.4. Условия равновесия плоской системы сил
В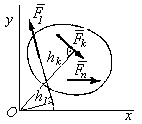 заключение рассмотрим еще один частный
случай, а именно систему, все силы которой
расположены в одной плоскости (такая
система сил называется плоской), и
найдем аналитические условия ее
равновесия. Для этого совместим
плоскость осей Оху с плоскостью
действия сил системы (рис. 5.7); тогда
проекции всех сил на ось Oz
и моменты всех сил относительно осей
Ох и Оу равны нулю и
заключение рассмотрим еще один частный
случай, а именно систему, все силы которой
расположены в одной плоскости (такая
система сил называется плоской), и
найдем аналитические условия ее
равновесия. Для этого совместим
плоскость осей Оху с плоскостью
действия сил системы (рис. 5.7); тогда
проекции всех сил на ось Oz
и моменты всех сил относительно осей
Ох и Оу равны нулю и
Рис. 5.7 уравнения
![]() ,
,
![]() ,
,
![]() ,
,
выполняются тождественно. Поэтому из шести уравнений (5.2) равновесия произвольной системы сил остаются только три:
![]() ,
,
![]() ,
,
![]() .
.
Последнее условие можно несколько упростить. Поскольку все силы лежат в плоскости Оху, то их моменты относительно оси Oz равны их алгебраическим моментам относительно точки О:
![]() .
.
Тогда
![]() и, следовательно, условия равновесия
плоской системы сил принимают вид
и, следовательно, условия равновесия
плоской системы сил принимают вид
,
,
![]() .
(5.8)
.
(5.8)
то есть для равновесия плоской системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы сумма проекций сил на каждую из двух взаимно перпендикулярных осей координат, лежащих в плоскости действия сил, и сумма алгебраических моментов этих сил относительно любой точки данной плоскости были равны нулю.
Кроме этой основной формы условий равновесия плоской системы сил часто используются еще две формы, которые являются следствием уравнений (5.8) и приводятся без доказательства.
Вторая форма условий равновесия: для равновесия плоской системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы алгебраических моментов сил системы относительно трех произвольных точек, расположенных в плоскости действия сил и не лежащих на одной прямой, равнялись нулю, т. е.
![]() ,
,
![]() ,
,
![]() .
(5.9)
.
(5.9)
Третья форма условий равновесия: для равновесия плоской системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы алгебраических моментов сил относительно двух точек А и В, лежащих в плоскости действия сил, и сумма проекций этих сил на ось, лежащую в этой плоскости и не перпендикулярную прямой, проходящей через точки А и В, равнялись нулю, то есть
,
,
![]() ,
(5.10)
,
(5.10)
причем ось Ox не перпендикулярна прямой АВ.
П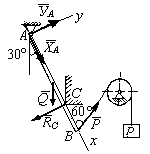 ример
1. Однородный
стержень АВ
длиной l=
40 см и весом Q=200
Н шарнирно закреплен в точке А
и свободно опирается на опору С
(рис. 5.8). К концу B
стержня привязана веревка, перекинутая
через блок D
и несущая
на своем конце груз весом Р
= 100 Н. Расстояние АС
= 30 см.
Пренебрегая трением в блоке, найти
реакции опор.
ример
1. Однородный
стержень АВ
длиной l=
40 см и весом Q=200
Н шарнирно закреплен в точке А
и свободно опирается на опору С
(рис. 5.8). К концу B
стержня привязана веревка, перекинутая
через блок D
и несущая
на своем конце груз весом Р
= 100 Н. Расстояние АС
= 30 см.
Пренебрегая трением в блоке, найти
реакции опор.
Решение. Рассмотрим равновесие стержня АВ. На него действуют вес Q, сила натяжения троса, равная весу груза, а также реакции опор А и С.
Рис. 5.8 Реакция опоры С перпендикулярна стержню; поэтому проведем оси Ах и Ау вдоль стержня и перпендикулярно ему (это упростит уравнения равновесия) и разложим реакцию цилиндрического шарнира А на составляющие ХА и УА. Составим уравнения равновесия плоской системы сил, действующей на стержень:
(1) ; ХА + Q cos 30˚ - Р cos 60° = 0,
(2) ; УА – Q cos 60° +р sin 60° - RС = 0,
(3)
![]() ;
-
Q
cos 60° ·AE
- RС·AC
+P cos
30˚
·AB
= 0.
;
-
Q
cos 60° ·AE
- RС·AC
+P cos
30˚
·AB
= 0.