

4.3.2. Силы, действующие на абсолютно твердое тело
Как уже говорилось, мерой механического взаимодействия материальных тел является сила, то есть векторная величина, определяемая модулем, направлением и точкой приложения. Поскольку теоретическая механика изучает движение абсолютно твердого тела, то приложенные к этому телу силы обладают рядом особенностей.
Очевидно, что две
силы, приложенные к абсолютно твердому
телу, не изменят его состояния движения
или покоя, если они равны по величине и
направлены в противоположные стороны
по одной прямой. Так как эти силы образуют
уравновешенную систему, то есть
эквивалентную нулю![]() ~0.
Ясно так же, что если к свободному
твердому телу приложить уравновешенную
систему сил или отбросить такую систему,
то его состояние движения или покоя не
изменится.
~0.
Ясно так же, что если к свободному
твердому телу приложить уравновешенную
систему сил или отбросить такую систему,
то его состояние движения или покоя не
изменится.
И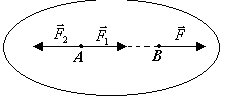 з
этих двух очевидных положений следует,
что силу,
приложенную к абсолютно твердому телу,
не изменяя его состояния покоя или
движения, можно перенести вдоль линии
действия в любую точку тела. Действительно,
пусть сила
приложена
в точке А
тела (рис.
4.17). Приложим в точке В,
з
этих двух очевидных положений следует,
что силу,
приложенную к абсолютно твердому телу,
не изменяя его состояния покоя или
движения, можно перенести вдоль линии
действия в любую точку тела. Действительно,
пусть сила
приложена
в точке А
тела (рис.
4.17). Приложим в точке В,
Рис. 4.17
лежащей на линии действия силы
уравновешенную систему сил
,
таких что
![]() .
Тогда
~
.
Тогда
~![]() Но система сил
,
равных по модулю, противоположных по
направлению и имеющих общую линию
действия, эквивалентна нулю и может
быть отброшена. Тогда
~
Но система сил
,
равных по модулю, противоположных по
направлению и имеющих общую линию
действия, эквивалентна нулю и может
быть отброшена. Тогда
~![]() ,
что и требовалось доказать.
,
что и требовалось доказать.
Если к одной точке твердого тела приложены несколько сил, то, как и в случае действия такой системы сил на материальную точку, они могут быть заменены одной силой – равнодействующей, равной геометричес-кой сумме этих сил и приложенной в этой же точке.
Рассмотрим теперь систему действующих на абсолютно твердое тело сил, линии действия которых пересекаются в одной точке (рис. 4.18). Такие силы называются сходящимися. На основании доказанного свойства о переносе силы вдоль линии ее действия данная система сил эквивалентна системе сил, приложенных к одной точке (точка А на рис. 4.18), а такая система сил имеет равнодействующую. Таким образом, система сходящихся сил имеет равнодействующую, равную геометрической сумме сил системы и приложенную в точке пересечения их линий действия.
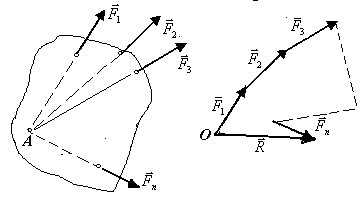
Рис. 4.18
Если же на абсолютно
твердое тело действуют две одинаково
направленные параллельные силы
и
![]() (рис. 4.19), приложенные в точках А
и В
соответственно,
то их равнодействующая имеет направление
слагаемых сил и модуль, равный сумме
модулей исходных сил, а точка ее приложения
делит отрезок, соединяющий точки
(рис. 4.19), приложенные в точках А
и В
соответственно,
то их равнодействующая имеет направление
слагаемых сил и модуль, равный сумме
модулей исходных сил, а точка ее приложения
делит отрезок, соединяющий точки

Рис. 4.19
приложения сил, на части, обратно пропорциональные слагаемым силам, т.е.
![]() ;
;
![]() .
(4.34)
.
(4.34)
Чтобы доказать
это, приложим в точках А
и В
уравновешенную систему сил
![]() ,
линии действия которых совпадают с
прямой АВ;
,
линии действия которых совпадают с
прямой АВ;
![]() =
-
=
-![]() .
Полученная система сил
.
Полученная система сил![]() будет эквивалентна исходной
.
будет эквивалентна исходной
.
Системы сил
и
можно заменить соответствующими
равнодействующими
![]() и
и![]() ,
а полученные в результате сходящиеся
силы
,
а полученные в результате сходящиеся
силы
![]() и
и
![]() тоже заменить их равнодействующей
тоже заменить их равнодействующей
![]() ,
приложенной в точке D.
Так как
=-
и
║
,
то
,
приложенной в точке D.
Так как
=-
и
║
,
то
![]() ,
а ее модуль равен сумме модулей слагаемых
сил:
,
а ее модуль равен сумме модулей слагаемых
сил:
![]() .
Перенесем
вдоль линии ее действия в точку С,
лежащую на прямой АВ.
В результате исходная система сил
заменится одной силой — равнодействующей
,
направленной в сторону слагаемых сил
и приложенной в точке С
отрезка АВ.
Из построений на рис. 4.19 следует, что
треугольник ADC
подобен треугольнику KAL,
а треугольник CDB
— треугольнику
MBN,
поэтому AC/KL
= DC/AL
и BC/MN
= DC/BM.
Учитывая, что KL
= MN
=
,
AL
=
,
ВМ
=
,
окончательно получим
.
Перенесем
вдоль линии ее действия в точку С,
лежащую на прямой АВ.
В результате исходная система сил
заменится одной силой — равнодействующей
,
направленной в сторону слагаемых сил
и приложенной в точке С
отрезка АВ.
Из построений на рис. 4.19 следует, что
треугольник ADC
подобен треугольнику KAL,
а треугольник CDB
— треугольнику
MBN,
поэтому AC/KL
= DC/AL
и BC/MN
= DC/BM.
Учитывая, что KL
= MN
=
,
AL
=
,
ВМ
=
,
окончательно получим
![]() ,
,
что и требовалось доказать.
А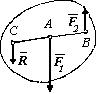 налогично
доказывается и случай, когда параллельные
силы
и
имеют противоположные направления
(рис. 4.20). Тогда их равнодействую-щая по
модулю равна разности
налогично
доказывается и случай, когда параллельные
силы
и
имеют противоположные направления
(рис. 4.20). Тогда их равнодействую-щая по
модулю равна разности
Рис. 4.20 модулей слагаемых сил и имеет направление большей силы, а точка ее приложения С делит отрезок АВ на части, обратно пропорциональные силам, но внешним образом, то есть
![]() ,
,
![]() .
.
Ясно, что по этим же правилам мы можем разложить одну силу на две параллельные ей составляющие, приложенные в заданных точках тела.
Рассмотрим случай,
когда система одинаково направленных
параллельных сил
![]() ,
приложенных в точках M1,
М2, ..., Мn
тела (рис. 4.21). По правилу сложения
параллельных сил (4.34) мы можем заменить
силы
,
приложенных в точках M1,
М2, ..., Мn
тела (рис. 4.21). По правилу сложения
параллельных сил (4.34) мы можем заменить
силы
![]() и
и
![]() силой
силой![]() +
,
приложенной в точке C1.
Складывая полученную силу
+
,
приложенной в точке C1.
Складывая полученную силу
![]() с
силой
с
силой
![]() ,
,
з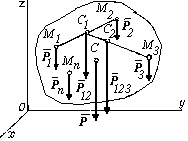 аменим
их равнодействующей
аменим
их равнодействующей
![]() ,
,
приложенной
в точке С2. Последовательно
складывая вновь полученную равнодействующую
с последующей силой системы, придем к
одной силе
![]() ,
,
Рис. 4.21 являющейся равнодействующей исходной системы сил и приложенной в определенной точке С тела. Найдем координаты этой точки, считая координаты точек приложения сил системы известными. Точка С, делит отрезок М1М2 на части, обратно пропорциональные силам и , то есть
![]() .
.
Но, как известно из аналитической геометрии, координаты точки C1, делящей отрезок в таком отношении, определяются выражениями
![]() ,
,
![]() ,
,
![]() .
.
Аналогичным образом
координаты точки C2
приложения силы
![]() определяются (
определяются (![]() )
так:
)
так:
 и т. д.
и т. д.
Таким образом, по
индукции можно заключить, что система
одинаково направленных параллельных
сил![]() действующих на абсолютно твердое
тело, имеет равнодействующую,
параллельную силам системы, равную
сумме всех сил системы
действующих на абсолютно твердое
тело, имеет равнодействующую,
параллельную силам системы, равную
сумме всех сил системы
![]() (4.35)
(4.35)
и приложенную в точке С, координаты которой определяются выражениями
 ,
,
 ,
,
 ,
(4.36)
,
(4.36)
где xk,, yk, zk — координаты точек приложения сил системы.