

7. Моделирование замкнутой системы
Передаточная функция скорректированной системы, изображенной на рис. 9, равна:
![]()
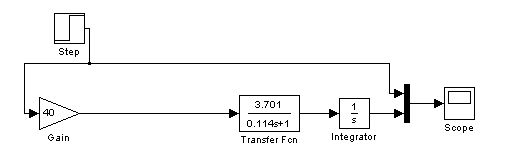
Разработаем модель замкнутой системы с использованием приложения Simulink системы MATLAB. На вход системы будем подавать единичный скачок (для определения статической ошибки) и линейно возрастающий сигнал (для определения кинетической ошибки) и синусоидальный сигнал (для определения динамической ошибки).
![]()
![]()
![]()
![]()
Передаточная функция замкнутой системы:

Модель замкнутой системы:

Отработка единичного скачка.
Графики переходного процесса, ошибки системы и входного сигнала при подаче на вход системы единичного скачка.

Покажем аналитически, что статическая ошибка системы в установившемся режиме равна 0.
По теореме о предельном значении:
![]()
Отработка линейно возрастающего сигнала.
Графики переходного процесса, ошибки системы и входного сигнала при подаче на вход линейно возрастающего сигнала.
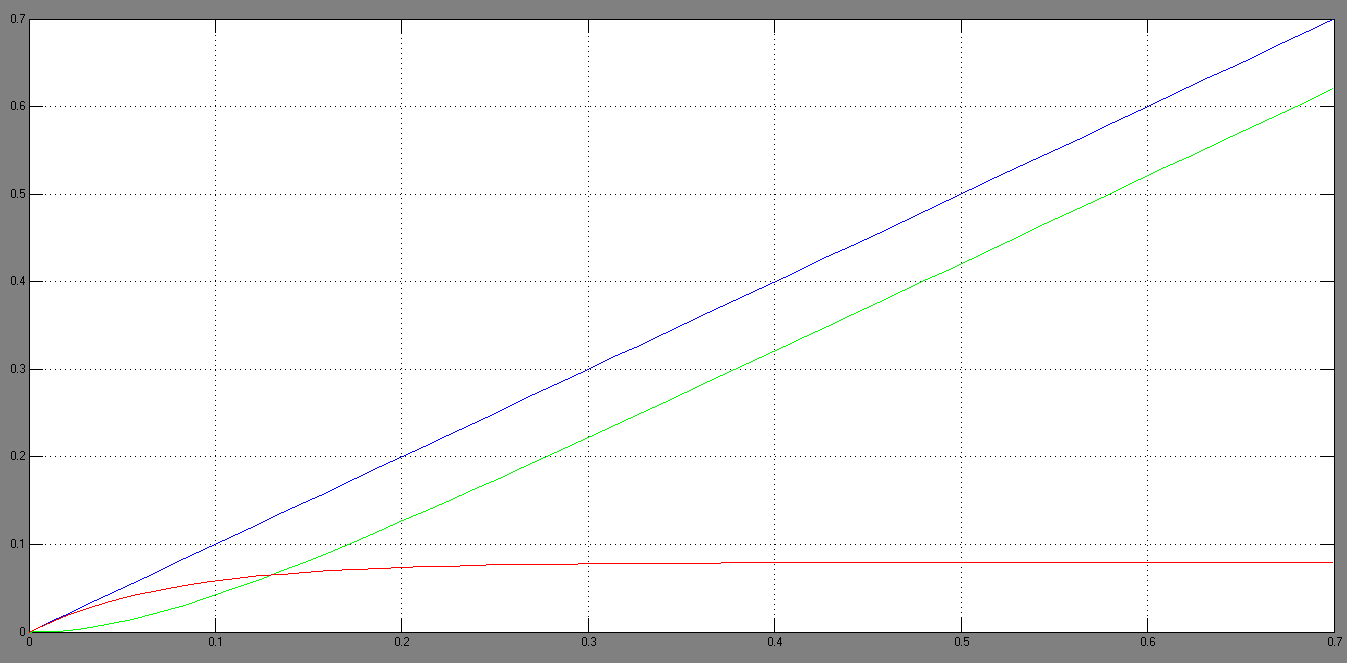
Определим аналитически значение кинетической ошибки системы в установившемся режиме.
![]()
![]()
![]()
![]()
Отработка синусоидального сигнала.
Графики переходного процесса, ошибки системы и входного сигнала при подаче на вход синусоидального сигнала.
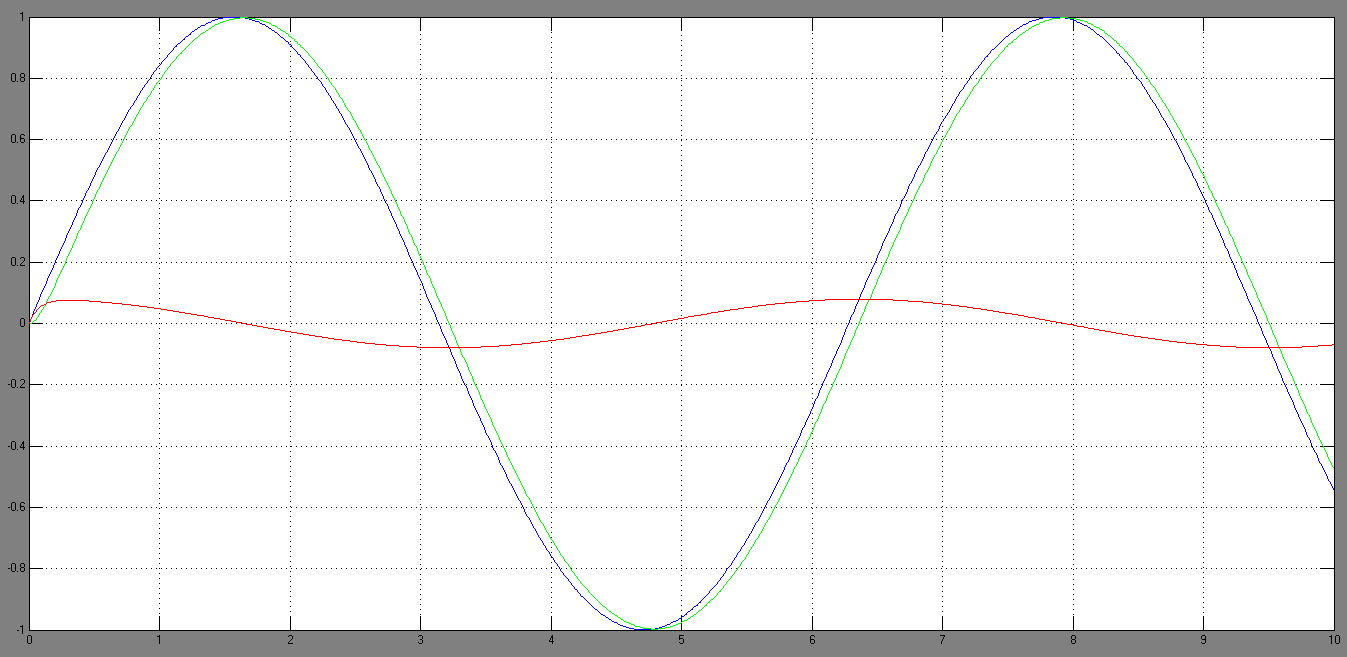
Определим аналитически значение динамической ошибки системы в установившемся режиме.
![]()
![]()
![]()
![]()
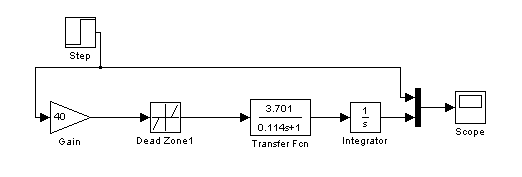
Введение нелинейного элемента (зоны нечувствительности).


Введем зону нечувствительности на вход, при единичном скачке. Примем нижний порог зоны нечувствительности равным -0.5, верхний порог равным 0.5. Тогда модель замкнутой системы будет:

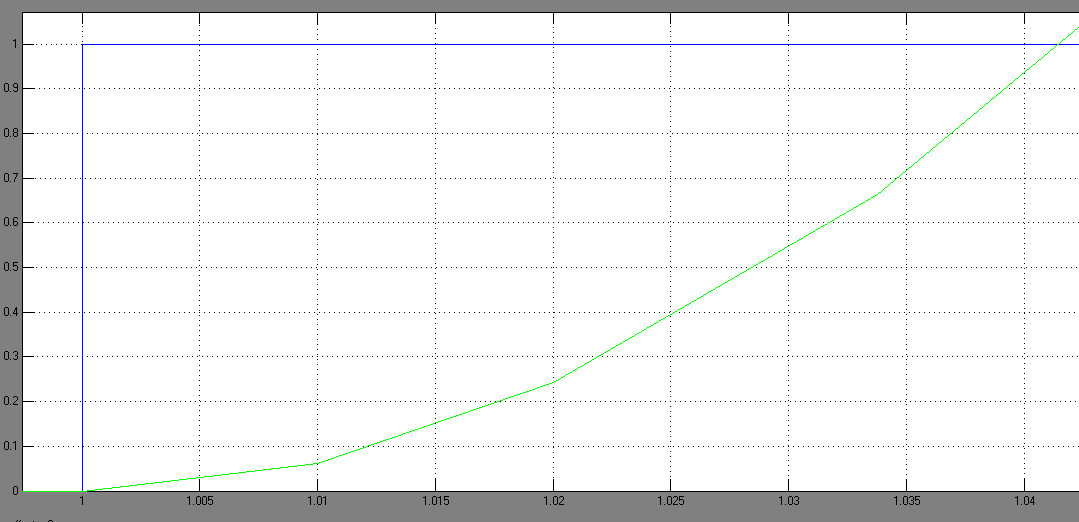
Для
 :
:
