

Московский Энергетический Институт (Технический Университет)
ЦП РГИ «МЭИ-Фесто»
Курсовой проект по курсу: Электромеханические системы
Тема: Следящая система
Вариант № A-11
Студент: Савичев А.М.
Группа: ФМ-1-07
Преподаватель: Хризолитова С.А.
Москва
2011
Содержание:
1. Исходные данные……………………………………………………...……………………...3
2. Выбор типоразмера двигателя и расчет редуктора…..……………………………………..4
3. Расчет усилителя мощности………………….....…………………....………………………9
4. Расчет коэффициента усиления разомкнутой системы, электромеханической постоянной времени двигателя и запаса по фазе нестабилизированной системы………………………………………………………………………………………….12
5. Составление передаточной функции разомкнутой стабилизированной системы, определение ее параметров, построение ЛАЧХ и вычисление запаса по фазе и
показателей качества переходного процесса…...…………………………………………….18
6. Определение параметров предварительного усилителя…………………………………..21
7. Принципиальная схема, частотные характеристики, результаты оценок переходного процесса и ошибок системы при моделировании режимов подачи на вход ступенчатого значения угла, равномерной и синусоидальной заводки………………….…………………25
8. Библиографический список…………………………………………………………………29
1. Исходные данные
Таблица 1.
N |
нм, р/с |
нм, р/с2 |
Мнс, Нм |
Jн∙10-3, кгм2 |
tР, c |
ск, град |
д, град |
А11 |
1.36 |
10.5 |
2.49 |
108 |
0.1 |
1.5 |
2 |
нм - наибольшая скорость вращения исполнительного вала при равномерной заводке и амплитуда скорости при синусной заводке;
нм - амплитуда ускорения исполнительного вала при синусной заводке;
Мнс - статический момент сухого трения на исполнительном валу;
Jн - момент инерции нагрузки исполнительного вала;
ск - сумма статической и кинетической погрешностей при равномерной заводке со скоростью нм;
д - динамическая погрешность при синусной заводке при амплитудных значениях скорости нм и ускорения нм;
ip - КПД i-ступени редуктора (ip = 0.97), для предварительной оценки числа редуктора КПД редуктора принимаем p = 0.8;
з > /4 - запас по фазе разомкнутой системы;
tр - максимально допустимое время регулирования;
% - максимальная величина перерегулирования < 15%;
Серия двигателей – ЭМ-М; f = 400 Гц;
УМ – двухтактный транзисторный усилитель в классе В;
ИУ – бесконтактные сельсины БД-160А и БС-155А в трансформаторном режиме.
f = 400 Гц, Kи = 40 В/рад;
Тахогенератор
СЛ-М, Ктг =
![]() В∙с/рад, Jтг =
В∙с/рад, Jтг =
![]() кг∙м2;
кг∙м2;
Тип коррекции: жесткая обратная связь.
2. Выбор типоразмера двигателя и расчет редуктора
Требуемая мощность на валу двигателя оценивается из следующих соотношений:
![]() Вт
Вт![]() Вт
Вт![]() Вт
Вт
Рассчитаем среднюю требуемую мощность:
![]() Вт
Вт
Ближайший типоразмер двигателя с номинальной мощностью Pн > Pтреб : ЭМ-8М, однако он впоследствии оказался не достаточно мощным, поэтому был выбран ЭМ-15М.
Таблица 2. Технические данные двухфазного асинхронного двигателя ЭМ-15М
Тип |
Uн , B |
Рн , Вт |
Mп10-3 , Нм |
н , р/с |
Jя 10-8 кгм |
Rу , Oм |
xу , Oм |
D , мм |
ЭМ-15М |
80 |
15.2 |
58.9 |
670 |
345 |
55.2 |
70.0 |
4 |
Номинальные значения момента и скорости приближенно определяются из следующих соотношений:
![]()
Линеаризованная механическая характеристика двигателя для скоростей определяется по формуле:
![]() ,
,
где
![]()
Найдем коэффициент а и подставим полученное значение:
![]()
Диапазон возможных значений передаточного числа редуктора ip определяется корнями уравнения ip1 , ip2:
![]()
Получаем, что допустимое передаточное число редуктора может быть выбрано из условия:
26.1 < ip < 512.73;
Выбираем ip = 250
Допустимое передаточное число редуктора должно удовлетворять трём условиям, обеспечивающим нормальную работу двигателя:
1. Условие по скорости:
![]()
2. Условие по моменту:

3. Условие по перегреву:

Редуктор с тремя парами зацеплений схематично изображён на рис. 1.
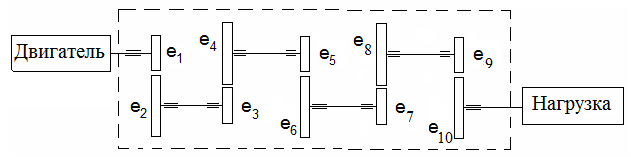
Рис.1
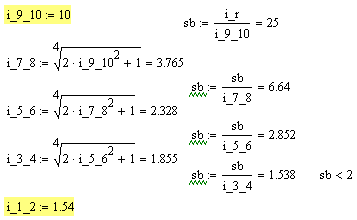
Для минимизации приведённого к валу двигателя момента инерции редуктора следует рассчитывать передаточные числа ступеней пар зацеплений с использованием соотношения:
![]()
![]()
Передаточное число редуктора определяется как произведение передаточных чисел всех пар зацеплений:
![]()
Передаточное число последней ступени in-1,n задаем из условия: in-1,n < (10..15)
Тогда передаточные числа 5-и ступенчатого редуктора:
i12 = 1.54; i34 = 1.855; i56 = 2.328; i78 = 3.765; i910 = 10
Оценка величины модуля зуба шестерни проводится из условия обеспечения прочности зубьев, используя соотношение для расчёта удельного давления на зуб:
![]()
где: Mн - момент на валу нагрузки;
Rн - радиус последней шестерни редуктора;
Kд - динамический коэффициент;
K- коэффициент перекрытия;
y - коэффициент формы зуба;
b - ширина шестерни;
m - модуль.
Для цилиндрических, прямозубых шестерён с эвольвентным профилем значения коэффициентов принимают равными:
Kд = 1,7 ; K = 1,25 ; y = 0,12 ; b = (5..10)m = m.
Для стальных колёс должно соблюдаться условие:
![]()
![]()
С учётом этого величина модуля оценивается как:
![]()
По стандартной шкале модулей выбираем m = 0.4 мм
Количество зубьев на ведущих шестернях должно быть:
Z1 = Z3 = …..= Zn-1 15
Тогда выбираем Z1 = Z3 = Z5 = Z7 = Z9 = 30
Диаметры ведущих шестерен: D1 = D3 = D5 = D7 = D9 = m∙Zi = 12 мм
Диаметры и количества зубьев ведомых шестерен:
D2 = D1∙i12 = 18.48 мм ; Z2 = D2/m = 23.1;
D4 = D3∙i34 = 22.258 мм; Z4 = D4/m = 27.822;
D6 = D5∙i56 = 27.932 мм; Z6 = D6/m = 34.915;
D8 = D7∙i78 = 45.184 мм; Z6 = D6/m = 56.479;
D10 = D9∙i910 = 120 мм; Z6 = D6/m = 150;
Приведённый момент к валу двигателя редуктора:
![]()
Момент инерции сплошного цилиндрического колеса:
![]() ,
,
где: - плотность материала, из которого изготавливаются колеса ( = 7.7∙103 кг/м3);
b - толщина колеса;
Di - диаметр i-го колеса.
Тогда Jред = 6.147∙10-7 кг/м2
Проверка пригодности двигателя с рассчитанным редуктором:
1. Условие по
моменту:

2. Условие по скорости:
![]()
3. Условие по перегреву:
