

6.2.1 Назначение гониометрических систем
Принципиальной особенностью структурной схемы радиокомпаса АРК-19 (АРК-15М) является то, что в ней нет вращающейся рамочной антенны. Эксплуатация АРК с поворотной рамкой показала, что электромеханический блок рамки является наименее надежным элементом из-за неблагоприятных условий его работы, так как он имеет контакт с обшивкой ЛА и с внешней средой. Температура обшивки самолета может изменяться от – 60С до +140С, что в сочетании с изменением влажности до 98% приводит к температурным деформациям деталей блока, образованию конденсата влаги, усилению коррозии коллектора и другими нежелательным последствиям. Для устранения этих нежелательных явлений в АРК-19 (15М) вместо вращающейся рамки применена гониометрическая система, состоящая из двух взаимно перпендикулярных неподвижных рамок и гониометра. Электромеханический блок гониометра, конструктивно объединен с блоком приемника, размещается в отсеках радиооборудования, следовательно, работает в более благоприятных условиях и поэтому более надежен.
Гониометрическая система радиокомпаса АРК-19 (15М) представляет собой рамочные входные цепи радиокомпаса, которые служат для обеспечения направленного приема и усиления сигналов пеленгуемой радиостанции.
В нее входят:
- рамочная антенна;
- высокочастотный кабель соединения антенны с гониометром;
- гониометр;
- усилитель рамочного канала.
Рамочная антенна представляет собой две обмотки на ферритовом сердечнике, помещенном в металлическую ванну; витки обмотки выполнены взаимно перпендикулярными. Каждая из обмоток представляет собой отдельную рамочную антенну. Средние точки обмоток соединены с экранами кабелей, которые заземляются. На этом же сердечнике под углом к этим обмоткам размещен контрольный виток, используемый для проверки работоспособности АРК с помощью измерителя радиокомпасов ИРК-3 и устройств самоконтроля.
Рамочная антенна вместе с обмотками залита специальной термостойкой демпфирующей пеномассой и представляет собой монолитную конструкцию. Сочленяется рамка с кабелями через специальные разъемы.
Вывод: в качестве вывода по первому вопросу необходимо отметить, что гониометрическая система (рамочные входные цепи) радиокомпаса служит для направленного приема и усиления сигналов пеленгуемой радиостанции и состоит из рамочной антенны, гониометра, высокочастотного кабеля и усилителя рамочного канала.
6.2.2 Принцип работы гониометрической системы арк-19
Гониометрическая система – это бесконтактный преобразователь сигнала.
Состоит из двух взаимно-перпендикулярных рамочных антенн, плоскость одной из которых совпадает с продольной осью самолета, а плоскость второй перпендикулярна первой,
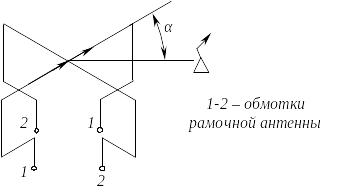
Рисунок 1
и гониометра состоящего из двух взаимно-перпендикулярных полевых, соединенных с рамочными антеннами, и искательной катушек.
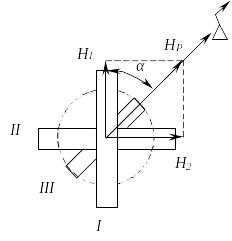
I и II – полевые катушки гониометра
III – искательная катушка гониометра
Рисунок 2
На каждой из двух взаимно-перпендикулярных обмоток рамочной антенны наводятся напряжения, амплитуды которых определяются по формулам:
U1-1 = Ehд2sin
U2-2 = Ehд1cos
где E – максимальное значение наводимых ЭДС, равное напряженности поля в точке приема;
hд1 и hд2 – действующие высоты 1-ой и 2-ой рамочных антенн;
– угол между направлением на радиостанцию и осью самолета.
Антенны 1-1 и 2-2 подключены к неподвижным обмоткам гониометра, в которых создаются магнитные поля H1 и H2 пропорциональные U1-1 и U2-2 соответственно. Результирующее магнитное поле в гониометре HР равно геометрической сумме полей H1 и H2. В этом поле помещена искательная катушка, соединенная с входом приемного устройства. Величина вектора результирующего поля определяется выражением:


Направление его в пространстве определяется углом вектора НР, т.е. направлением на радиостанцию с нормалью к плоскости первой полевой катушки I, совпадающей с магнитным полем H1, причем tg = H2sin / H1cos если H2 = H1, что практически всегда выполняется, то есть направление магнитного поля составляет с нормалью к плоскости первой полевой катушки гониометра I такой же угол , какой составляет направление прихода волны с плоскостью антенны в 1-1. При изменении направления прихода волны меняется соотношение между векторами H1 и H2 и вектор результирующего магнитного поля в гониометре меняет свое направление. Искательная катушка – это обмотка, лежащая в плоскости оси гониометра. Напряжение на ее зажимах определяется ориентацией этой катушки относительно результирующего вектора поля HР в пространстве полевых обмоток гониометра, так же как ЭДС на зажимах обмотки рамки зависит от ориентации последней относительно результирующего вектора электромагнитного поля радиостанции (рисунок 3).
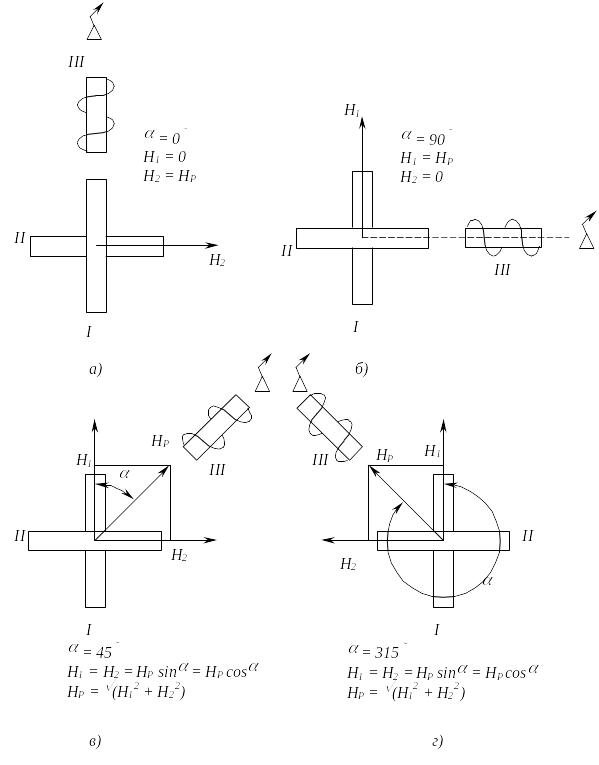
Рисунок 3
Таким образом, вращая искательную катушку гониометра, мы как бы вращаем рамочную антенну в модели электромагнитного поля, определяя направление, соответствующее нулевой ЭДС на зажимах искателя.
На рисунке 3 показано положение искательной катушки при различном положении приводных радиостанций по отношению к направлению полета летательного аппарата:
а – полет на радиостанцию;
б – при пролете траверза радиостанции;
в и г - радиостанции под углом 45 к направлению полета.
Рассмотрим функциональную электрическую схему блока гониометра изображенную на рисунке 4.
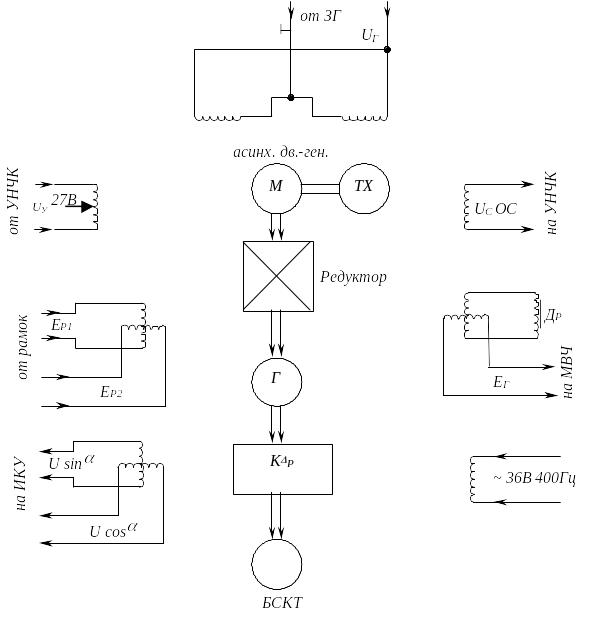
Рисунок 4 Структурная электрическая схема блока гониометра
Блок гониометра представляет собой исполнительный орган следящей системы. В его состав входят:
бесконтактный гониометр ПСГ-2 (индукционный преобразователь сигналов) – Г;
компенсатор радиодевиации kp;
бесконтактный синусно-косинусный трансформатор БСКТ;
асинхронный двигатель-генератор ДГМ 0,4Н (М);
редуктор;
тахогенератор.
P – редуктор с передачей i = 360;
ТХ – тахогенератор;
ЕР1, ЕР2 – ЭДС с рамочных антенн;
Uу – напряжение на обмотку управления двигателя с выхода усилителя компасного канала;
UГ – напряжение на обмотку возбуждения двигателя и тахогенератора с звукового генератора;
UC – напряжение обратной связи, пропорциональное скорости вращения двигателя;
36 В 400Гц – питание ротора БСКТ;
U sin, U cos – напряжение на БСКТ индикаторов;
ЕГ – напряжение со стартерных обмоток гониометра на модуль высокой частоты.
Бесконтактный гониометр ПСГ-2 или индукционный преобразователь сигнала используется для связи рамочных антенн с входом приемного устройства компаса.
Система из двух взаимно перпендикулярных рамок, соединенных с гониометром, эквивалентна вращающейся рамочной антенне.
Сигнал, принимаемый рамкой, через высокочастотный кабель передается на полевые катушки. Поле полевых катушек наводит ЭДС в искательной катушке. Сигнал с искательной катушки через индуктивный токосъем поступает на вход высокочастотного тракта АРК.
Для вращения искательной катушки гониометра применяется асинхронный двигатель-генератор ДГМ-0,4Н. Вращение осуществляется через редуктор с передаточным числом i = 360 до тех пор, пока искательная катушка не займет положение пеленга на принимаемую АРК радиостанцию. Для обеспечения плавного подхода искательной катушки к положению пеленга используется напряжение отрицательной обратной связи с тахогенератора. Двигатель и тахогенератор конструктивно выполнены в одном корпусе, обмотки возбуждения двигателя и тахогенератора запитываются напряжением частоты 133 Гц, поступающим с канала возбуждения. Напряжение на управляющую обмотку двигателя подается с усилителя компасного канала с фазовым сдвигом на 90 между напряжением, управляющим и возбуждения.
С выхода обмотки тахогенератора снимается напряжение, пропорциональное скорости вращения двигателя, которое поступает на предоконечные каскады усилителя компасного канала для создания отрицательной обратной связи.
Для передачи углового положения искательной катушки гониометра на стрелку курсового указателя в качестве датчика применяется бесконтактный синусно-косинусный преобразователь типа БСКТ-220-1Д8. Ось гониометра через механический компенсатор радиодевиации соединена с осью ротора БСКТ, который запитывается от бортсети 36 В 400 Гц через обмотку возбуждения. Напряжения, наводимые в статорных обмотках, передаются на индикатор для индикации курсового угла.
Вывод: таким образом, принцип работы гониометрической системы основан на взаимодействии ЭДС наводимой в рамочной антенне в зависимости от углового положения пеленгуемой станции и ЭДС в подвижной искательной катушке.