

2. Методы измерения дальности до цели и скорости сближения с целью.
Определение дальности до цели основано на измерении времени распространения радиоволн от РЛС до цели и обратно (времени задержки (t3)). Это время равно времени запаздывания принимаемого сигнала относительно излучаемого и определяется путем сравнения этих сигналов по какому-либо параметру. Поэтому дальность может быть измерена только в активных РЛС или в РЛС с активным ответом.
В зависимости от параметра сигнала, по которому определяется время запаздывания, различают временной (импульсный) и частотный методы измерения дальности.
а) Импульсный метод.
Пусть цель находится на дальности Д от РЛС. РЛС излучает высокочастотный импульсный сигнал (зондирующий). Этот сигнал и отраженный от цели (т.е. он же), проходят расстояние Д со скоростью света (с да 3*10 м/с) за время t3/2. Тогда Д определяется как:
 (1)
(1)
Так что при с ≈ const, достаточно измерить t3.
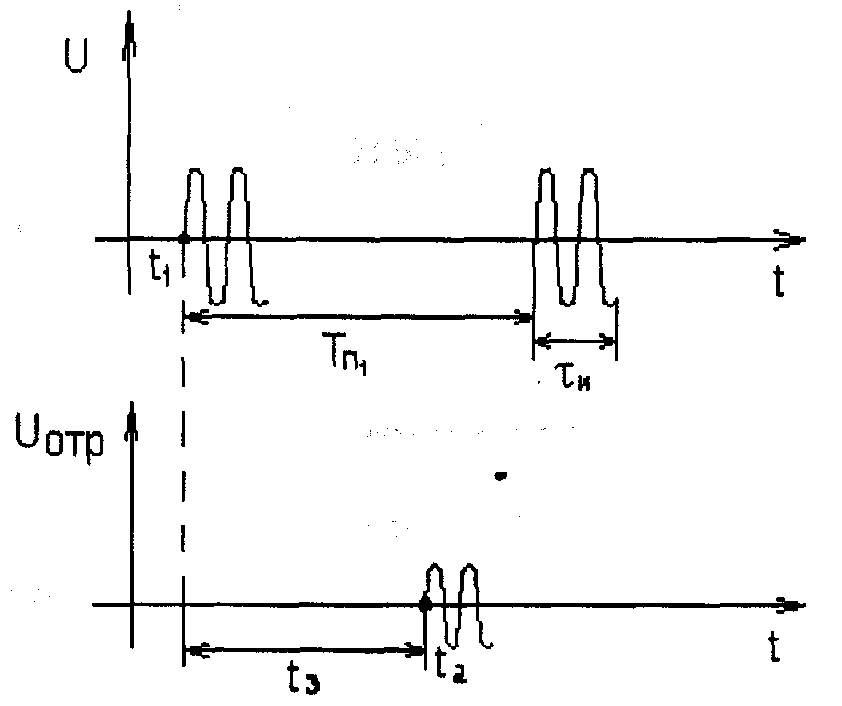
Рис.1
Для этого фиксируются моменты излучения зондирующего и приема отраженного импульса t1 и t2 соответственно. Точность фиксации величины t3 будет тем выше, чем меньше будет длительность импульса τи.
Чтобы обеспечить однозначность измерения в пределах максимальной дальности действия РЛС (Дmах) необходимо период следования зондирующих импульсов выбирать из условия:
 (2)
(2)
Достоинством импульсного метода измерения Д является относительная простота его практической реализации и возможность использования одной антенны. Однако при этом методе возможно только измерение дальностей Д > Дmin == сτи/2, т.к. во время излучения антенна отключена от приемника (т.е. появляется наличие слепой зоны) и не возможен прием отраженного сигнала. Это еще одна из причин выбора малой длительности зондирующего импульса.
Применяется данный метод в радиовысотомерах больших высот и в РЛС.
б) Частотный метод.
При этом методе используется частотная модуляция зондирующего сигнала с последующим сравнением по частоте с принимаемым сигналом. Так как в больших пределах частоту линейно менять невозможно, то линейную модуляцию осуществляют по пилообразному закону с пределом Тм.
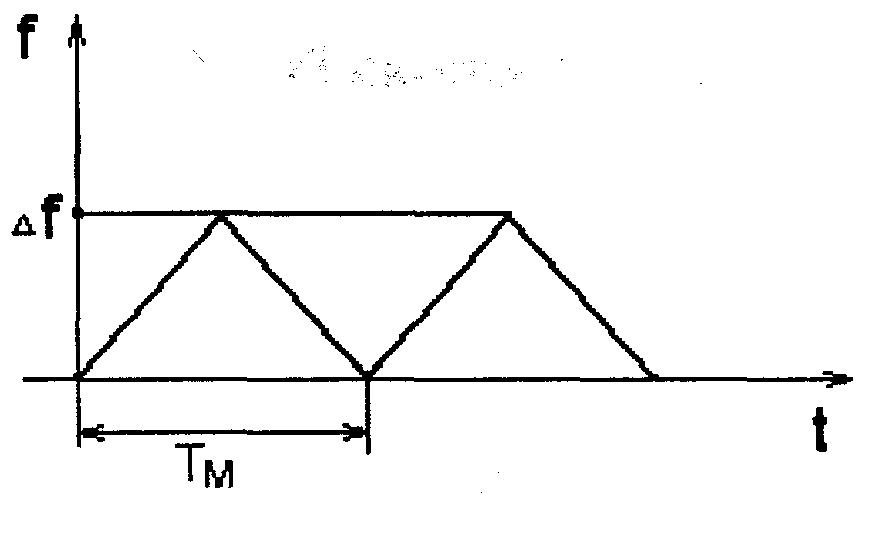
Рис.2
Пусть частота изменяемого сигнала равна
 (3)
(3)
где
а - скорость изменения частоты
 .
.
Тогда частота отраженного сигнала будет
 (4)
(4)
В результате сравнения этих сигналов получается сигнал разности частоты:
 (5)
(5)
Проводя измерение с помощью частотомера Fp, определяют дальность
 (6)
(6)
При этом однозначно измеряемая дальность
 (7)
(7)
Достоинствами частотного метода измерения дальности являются:
- возможность измерения Д в диапазоне 0 <Д < сТм/4;
- более низкая требуемая мощность зондирующего сигнала по сравнению с импульсным методом.
Однако при этом возникают несколько трудностей:
- требуются две антенны с хорошей развязкой между ними по частоте;
- сложность измерения дальности до нескольких целей одновременно.
Этот способ применяется в радиовысотомерах малых высот и в импульсных РЛС с высокой частотой повторения импульсов, для обеспечения однозначности измерения дальности.
в). Метод измерения скорости.
Измерение радиальной скорости перемещения цели (скорости изменения расстояния между РЛС и целью) основано на доплеровском эффекте. Если РЛС излучает непрерывный сигнал с текущей фазой

то текущая фаза принимаемого сигнала равна
 (8)
(8)
При постоянной радиальной скорости цели
Д = Д0+Vрt (9)
где Д0 — начальная дальность от цели.
Поэтому частота принимаемого сигнала отличается от частоты излучаемого сигнала на величину доплеровского смещения частоты.
 т.к.
т.к.



Отсюда следует, что сравнивая принимаемый и излучаемый сигналы по частоте, можно определить радиальную скорость (знак " ± " - приближение или удаление от локатора).

Методическую разработку составил старший преподаватель
полковник Ф. Султанов