

Постоянного тока
Цель работы: Ознакомиться с работой широтно-импульсного преобразователя постоянного тока при помощи компьютерного пакета программ MATLAB.
Краткие теоретические сведения: Электронные устройства, служащие для преобразования постоянного напряжения одной величины в постоянное напряжение другой величины, называются широтно-импулъсными преобразователями (ШИП). Современное состояние силовой полупроводниковой техники позволяет использование данного вида преобразователей в широком диапазоне напряжений и токов. В большинстве случаев нагрузкой данных преобразователей выступает двигатель постоянного тока. В зарубежной технике данный вид преобразователей имеет аббревиатуру DC/DC, что обозначает direct current/direct current, т.е. преобразование из постоянного тока в постоянный ток. Данный вид преобразователя выполнен на основе полупроводниковых приборов транзисторов. В первое время использовались биполярные транзисторы, но мощность преобразователя, выполненного на такой элементной базе, была незначительной. С развитием силовой преобразовательной техники появилась возможность для создания данного вида преобразователей на значительную мощность. Толчком стало разработка мощных IGBT -транзисторов, биполярных транзисторов с изолированным затвором.
Данный вид транзистора представляет собой два транзистора в одном корпусе, один из которых полевой, а другой - биполярный. Полевой транзистор служит для усиления импульса управления, подаваемого с блока управления инвертором, биполярный - для пропускания рабочей величины тока. Кроме того, в состав IGBT - транзистора обычно включается обратный диод, служащий для шунтирования выводов транзистора. Формирование выходных характеристик преобразователя происходит за счет изменения ширины импульсов транзистора включения и выключения, как и в автономном инверторе с ШИМ.
Использование ШИМ - модуляции позволяет получить на выходе широтно-импульсного преобразователя постоянное напряжение с регулируемыми величинами напряжения и частоты, с допустимым уровнем искажений. Нагрузкой широтно-импульсного преобразователей являются потребители постоянного тока, в большинстве случаев - двигатели постоянного тока. Использование широтно-импульсных преобразователей для питания двигателей постоянного тока позволяет регулировать скорость вращения якоря двигателя в широких пределах.
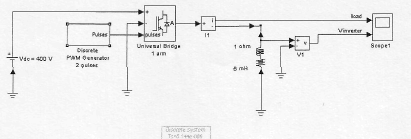
Рисунок 27 Функциональная схема широтно-импульсного преобразователя выполненная с использованием программного продукта MATLAB
Программа лабораторной работы: Моделирование широтно-импульсного преобразователя при помощи программы MATLAB заключается в следующем:
Сборка соответствующей схемы широтно-импульсного преобразователя при помощи программного продукта MATLAB;
Изменяя параметры элементов схемы широтно-импульсного преобразователя согласно указаниям по проведению лабораторной работы, получаем соответствующие осциллограммы;
Анализ полученных результатов компьютерного моделирования.
Выполнение лабораторной работы: на рис.27 представлена схема широтно-импульсного преобразователя выполненного при помощи компьютерного пакета программ MATLAB. Схема инвертора состоит из следующих элементов: источника постоянного напряжения (DC Voltage Source); IGBT - транзистора; генератора импульсов управления транзистором (Discrete PWN Generator); блока дискретного управления (Discrete system); измерителя тока и измерителя напряжения (Current (Voltage) Measurement); нагрузки (Series RLC Branch); осциллографа (Scope).
Ввиду того, что все из элементов были рассмотрены в предыдущих лабораторных работах, подробно останавливаться на используемых элементах нет необходимости.
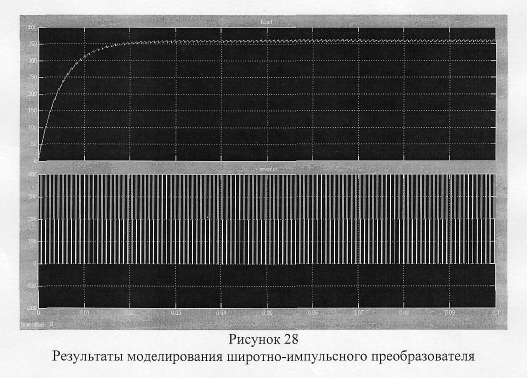
После задания всех параметров элементов и параметров моделирования на рабочей панели нажимаем клавишу start, после окончания моделирования левой клавишей мышки нажимаем на осциллограф и фиксируем результат моделирования (рис.28).
Задание по выполнению лабораторной работы:
1. Изменяя параметры промежуточной и индекса модуляции формирователя импульсов управления, рассмотреть поведение смоделированной системы и заполнить соответствующую таблицу 1.
Таблица 1 Данные компьютерного моделирования системы
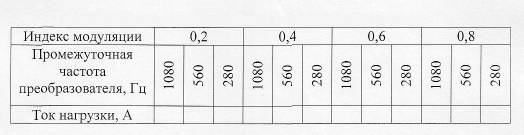
2. По результатам выполненного задания сделать соответствующие выводы по изменению величины тока в зависимости от индекса модуляции и промежуточной частоты преобразователя.