

5.Расчет параметров настроек сар с непрерывным регулятором
Разнообразные методы расчета параметров настроек регуляторов позволяют определит параметр идеальных регуляторов, уравнения которых приведены выше. Рассмотрим метод расчета параметров регулятора по переходной характеристике (см.рис.12). Преимущество этого метода в простоте эксперимента и расчета, недостатки – плохая помехозащищенность и малая достоверность начального участка характеристики объекта из-за нечувствительности аппаратуры.
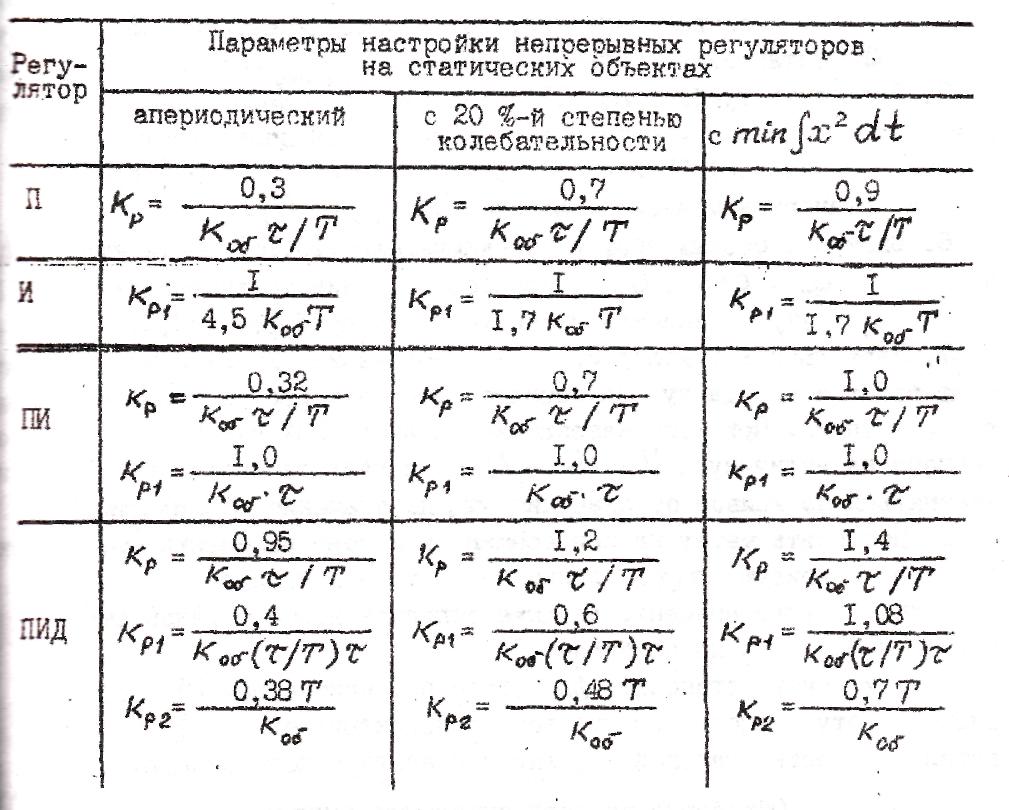
Если закон регулирования известен, то расчет параметров регулятора выполняется для одного выбранного из трех рекомендованных переходных
процессов с использованием экспериментально полученных в работе характеристик kоб ,τ,T (для объектов с самовыравниванием) по выражениям, приведенным в таблице.
Порядок выполнения работы
1. Включиь стенд. Для этого переключатель 14 (см.рис.3) “Включение установки” последовательно по часовой стрелке включить в положение 1,2,3. При этом на световом табло 13 загорятся сигнальные лампы “Установка включена”, “Включен масляный насос”, “Включено ЭМУ”.
2. Установить переключатель 20 ( см.рис.2 и 21 рис.3) рода работ в положение 3.На табло 20 (см.рис.3) засветится лампа “Работа 3”, “Скачок”. В дальнейшем номере в скобках относятся к рис.3, а вне скобок – к рис.2.
3. Выключить нагрузку, для этого тумблер 13 (11) поставить в положение “Выкл.”.Цепь генератора при этом будет выключена.
4. Поставить тумблер 23 (12) положение “Увеличение”, что соответствует его замкнутому состоянию, когда сопротивление 22 закорочено и не оказывает влияния, затем потенциометром 25 (7) “Вход ЭМУ” установить большее значение Uвх ЭМУ=U2.
5. Поставить тумблер 23 (12) в положение “Уменьшение”, что соответствует его разомкнутому состоянию, когда дополнительное сопротивление 22 (10) “Величина скачка” включено, и этим сопротивлением установить меньшее значение Uвх ЭМУ=U1.
6. Включить осциллограф и переключатели (15,18) поставить в положение UТГ=f(n),Uвх, зарисовать линии установившихся значений U1 и n1 и записать их значения по приборам (24,2).
7. Переключить тумблер 23 (12) в положение “Увеличение’ в момент времен, когда луч на осциллографе находится в крайнем левом положении. При этом напряжение на входе ЭМУ изменится ступенчато на величину ∆U=U2-U1, а частота вращения будет изменяться по кривой от значения n1 до значения n2 (см. рис.12).
8. Поставить метку на оси времени в момент изменения Uвх ЭМУ, зарисовать кривую n(t), линии новых установившихся значений U2 , n2 и метки времени, а также записать новые установившиеся значения U2 , n2 по приборам (24,2).
9. Выключить установку. Для этого потенциометром 25 (7) уменьшить частоту вращения до нулевой, а переключатель (14) последовательно против часовой стрелки поставить в положения 3,2,1.
Обработка экспериментальных данных
На
рис.12 приведено ступенчатое (скачкообразное)
изменение входной координаты ∆U=U2-U1,
возможный вид переходного процесса
n(t)
,
а также установившиеся значения входной
(U1,
U2)
и выходной (n1
, n2)
координат объекта. Необходимо определить
коэффициент передачи объекта по
управляющему воздействию по выражению


и сравнить его с коэффициентом, в работе № 1.
Для определения постоянной времени T и времени запаздывания τ необходимо с возможной тщательность провести касательную к кривой n(t) в точке перегиба n , как показано на рис. 12.
Для оценки точности математического описания необходимо в уравнение (2) подставить коэффициенты kоб , τ, T и построить переходный процесс при ступенчатом изменении ∆U=U2-U1, как результате решения этого уравнения, т.е. получить переходную характеристику для апериодического звена первого порядка с запаздыванием. Для этого надо использовать решение, которое имеет вид

Считая, что ∆n(t) изменяется при t-τ>0,а при t-τ≤0 ∆n=0 из-за наличия запаздывания в объекте. Сравниваем процессы 1,2 (см.рис.12), определить максимальную ошибку как ∆=(nэ-nm)100%/n2, где nэ , nm - частота вращения соответственно определена по экспериментальной 1 (см.рис.12) и теоретической 2 (см.рис.12) кривым, в момент времени, когда они наиболее отличаются; n2 - новое установившееся значение частоты вращения.
По заданным преподавателем требованиям к системе выбрать закон регулирования и рассчитать параметры настройки регулятора.
Содержание отчета
Отчет должен содержать:
1) цель работы
2) порядок проведения эксперимента;
3) обработку экспериментальных данных;
4) уравнение объекта регулирования с экспериментально полученным коэффициентами;
5) переходные процессы: экспериментальный и теоретический;
6) результаты сравнения экспериментального и теоретического процессов;
7) закон работы регулятор с рассчитанными параметрами настройки и проектируемые показатели качества САР;
8) выводы о полученных результатах.
Контрольные вопросы
1.Понятие динамических характеристик, виды динамических характеристик.
2.Виды объектов регулирования и их характеристики.
3.Методика получения динамических характеристик объекта.
4.Физический смысл коэффициентов уравнения объекта.
5.Основные законы работы промышленных регуляторов.
6.Требования к непрерывным системам регулирования.
7.Порядок выбора закона регулирования.
8.Расчет параметров настройки регуляторов.
Лабораторная работа № 4
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ПАРАМЕТРОВ НАСТРОЙКИ РЕГУЛЯТОРА НА КАЧЕСТВО ПРОЦЕССА РЕГУЛИРОВАНИЯ
Цель работы: освоить методику экспериментального определения требуемых параметров настройки автоматического регулятора.
Краткие сведения, необходимые для выполнения работы