3.Требования к непрерывным системам регулирования
Предъявляемые к системе регулирования требования касаются устойчивости и качества регулирования. Систем регулирования можно считать работоспособной, если она во всех случаях устойчива. Серийные регуляторы при правильно выбранных законе и настройках обеспечивают устойчивый процесс регулирования его качество.
При оценке качества регулирования рассматривают характер переходного процесса, вызванного возмущением определенной формы (в данном случае скачкообразным возмущением, и величины, а также показатели качества регулирования либо используют интегральные оценки качества.
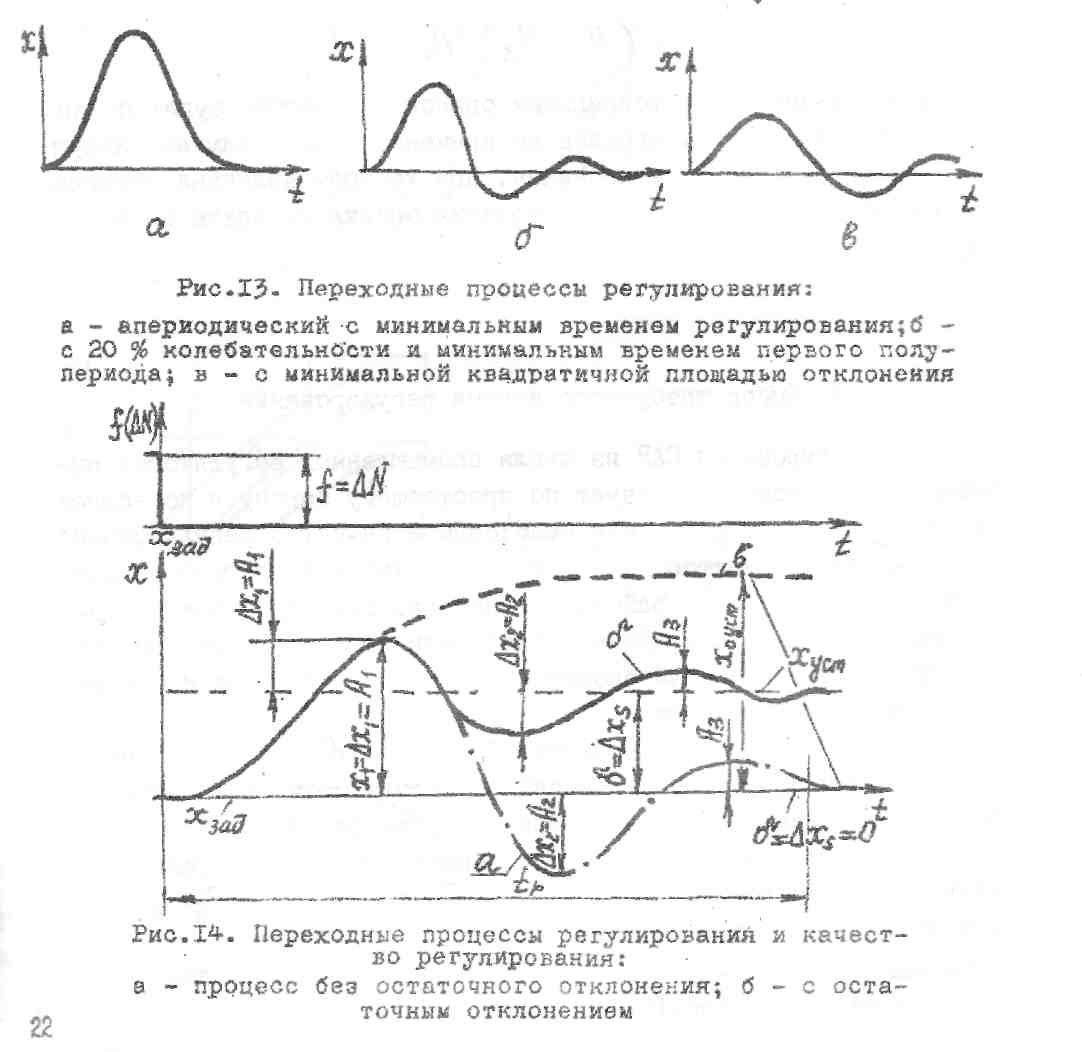
В общем случае при выборе закона регулирования и расчете параметров настроек в соответствии с используемой в работе методикой рекомендованы три вида переходных процессов (рис.13): апериодический с минимальным временем
регулирования;
с 20 %-й степенью
колебательности, обеспечивающий
минимальное время первого полупериода
колебаний; с минимальной квадратичной
площадью отклонения, т.е. с min![]() dt
(min
dt
(min![]() –
и следующие показатели качества:
–
и следующие показатели качества:
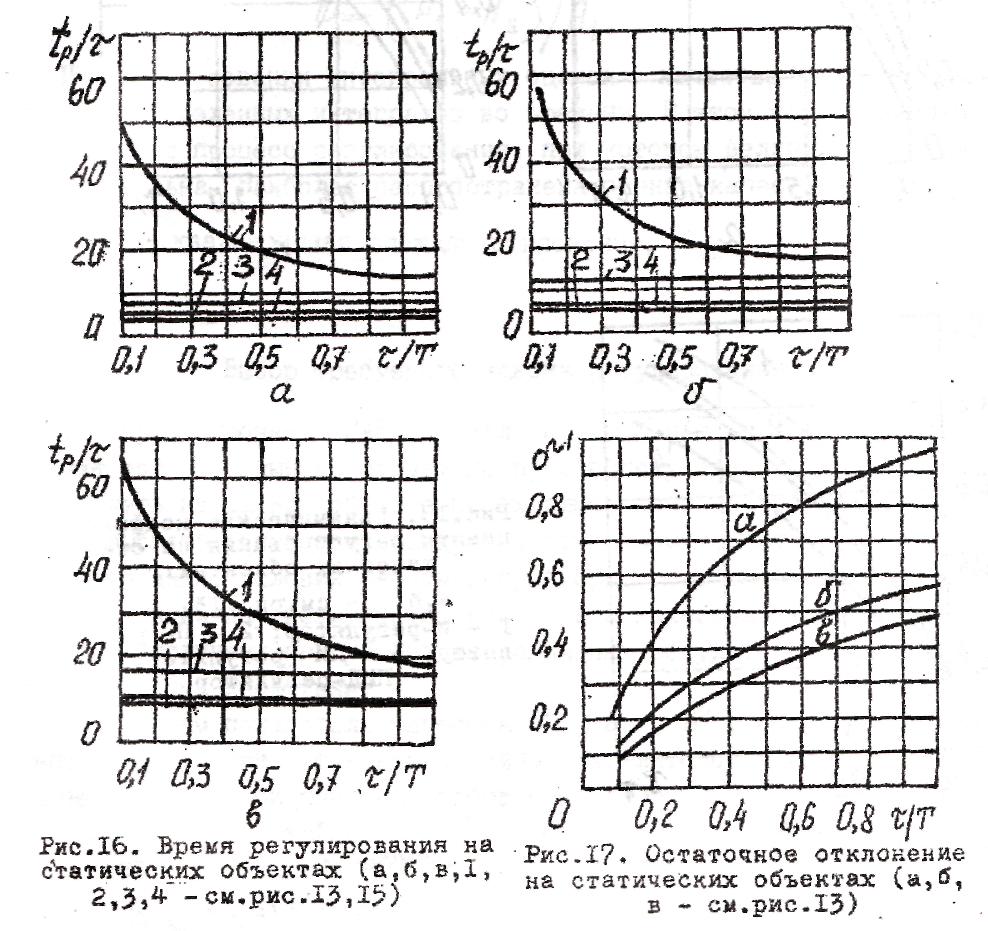
- остаточное отклонение или статическая ошибка δ=∆xs=∆ns - отличие нового установившегося значения регулируемой величины xуст=nуст от заданного xзад =nзад (рис.14);
- максимальное динамическое отклонение ∆x1=∆n1=A1 регулируемой величины от нового установившегося значения;
- коэффициент R∂=x1/x0уст=n1/n0уст , характеризующий степень воздействия регулятора (понижение динамического отклонения), где x1 , n1 , x0уст , n0уст = kоб∆U - максимальное отклонение регулируемой величины при наличии x1 , n1 и отсутствии x0уст , n0уст регулятора на статическом объекте (см.рис.14);
- время регулирования tp - время от подачи возмущения до момента, когда регулируемая величина становится меньше допустимой δε по технологическим соображениям, обычно δε равно ±0,05 от установившегося значения регулируемой величины xуст;
- степень колебательности φ=(A1/A2)100%=(∆x2/∆x1)100%, т.е. отношение второй, противоположно направленной амплитуды колебаний A2=∆x2=∆n2 к первой максимальной амплитуде A1=∆x1=∆n1 , выраженное в процентах;
перерегулирование A1=∆x1=∆xmax - максимальное отклонение регулируемой величины от нового установившегося значения. Обычно первый максимум наибольший .
 Относительное
перерегулирование определяют по формуле
Относительное
перерегулирование определяют по формуле
а
степень затухания колебаний

![]()
![]() -квадратичная
площадь отклонения.
-квадратичная
площадь отклонения.
4.Выбор требуемого закона регулирования
При проектирований САР из числа промышленных регуляторов выбирают тот, который действует по простейшему закону и позволяет обеспечить на данном объекте необходимое качество регулирования. Чтобы выбрать регулятор, следует знать характеристики объекта регулирования, условия работы регулятора, т.е. требования к качеству и величину возмущения, показатели качества, которые могут быть получены при установке различных регуляторов на объектах с разными свойствами.
Рассмотрим показатели качества R∂ ,tp ,δ , которые могу быть получены при установке серийных регуляторов на объектах с разными свойствами при скачкообразном возмущении.
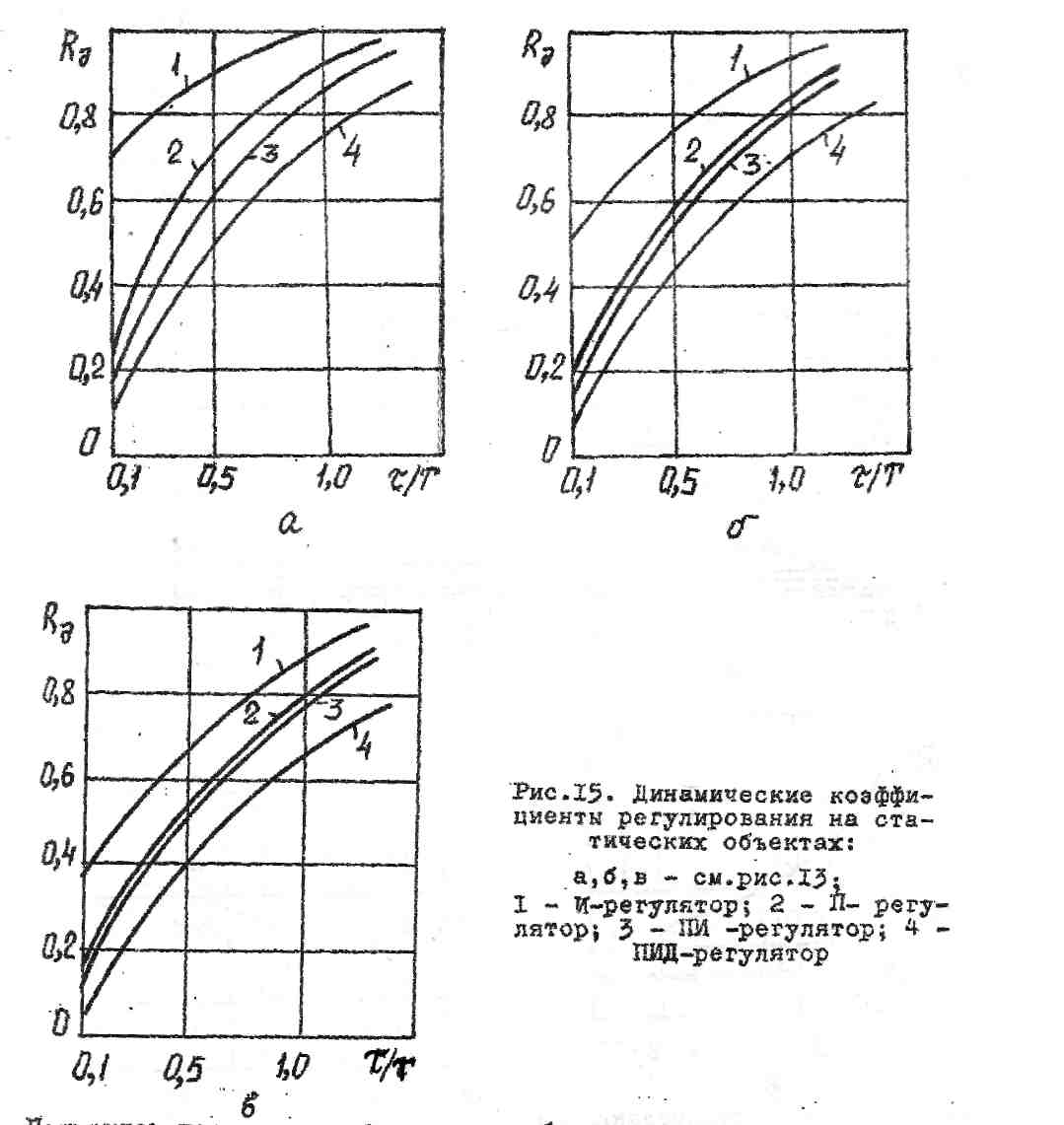
Динамические коэффициенты Rδ , определяющие максимальное отклонение регулируемой величины x1=Rбkобyв (∆n1= R∂ kоб∆U) приведены на рис.15 в
зависимости от вида переходного процесса и закона регулирования. Относительное время регулирования tp /τ проиллюстрировано рис .16.
Для П-, ПИ-, ПИД- регуляторов величина tp /τ – величина постоянная при разных τ/T и зависит только от характера переходного процесса и может быть определена по таблице.
Пользуясь параметром объекта и требованиями к системе, следует определить коэффициент Rб= x1 /kобyв=∆n/kоб ∆U для наибольшего ∆U .По графикам Rб (τ/T ) (см.рис.15) для принятого переходного процесса находят R∂ у всех регуляторов.
Далее по рис.16 определяют tp /τ , а следовательно, и tp аналогично нахождению R∂ Затем определяют простейший регулятор, обеспечивающий R∂ и tp меньше требуемого. Если выбран П- регулятор, то по графику δ(τ/T) (рис.17) проверяют величину остаточного отклонения δ=∆xs=∆ns Если оно превышает допустимое значение, то выбирают другой регулятор, включающий И составляющую и получают астатическую систему. Если ни один регулятор не соответствует поставленным требованиям, то проверяют, нельзя ли использовать другой переходный процесс. Конкретный регулятор
выбирают в зависимости от имеющейся номенклатуры, условий эксплуатации, требований заказчика.