

УДК 62-50:629.12-8
Бугрим Л.И., Кондратенко Ю.П., Чичканъ Л.А. Автоматизация судовых энергетических установок: Методические указания к лабораторным работам. - Николаев: УТМТУ, 1995.- 35 с.
 К
а ф е д р а автоматики
К
а ф е д р а автоматики
Настоящие указания содержат описание лабораторного стенда и методику проведения лабораторных работ по курсу "Автоматизация судовых энергетических установок".Рассмотрены вопросы статики и динамики систем автоматического, регулирования, методы экспериментального определения уравнения динамики элементов и систем. Предназначены для студентов, обучающихся по специальностям 14.02, 14.04 и 21.05.
Ил.7, табл. 5 , спис. лит. - 4 назв.
Рецензент к.т.н., доп. А.П.Гуров
(С) Украинский государственный морской технический университет, 1995
ОПИСАНИЕ ЛАБОРАТОРНОГО СТЕНДА
I. Функциональная схема стенда
Лабораторный стенд представляет собой систему автоматической стабилизации с комплектом задающей, измерительной и регистрирующей аппаратуры.
Функциональная схема стенда представлена на рис.1
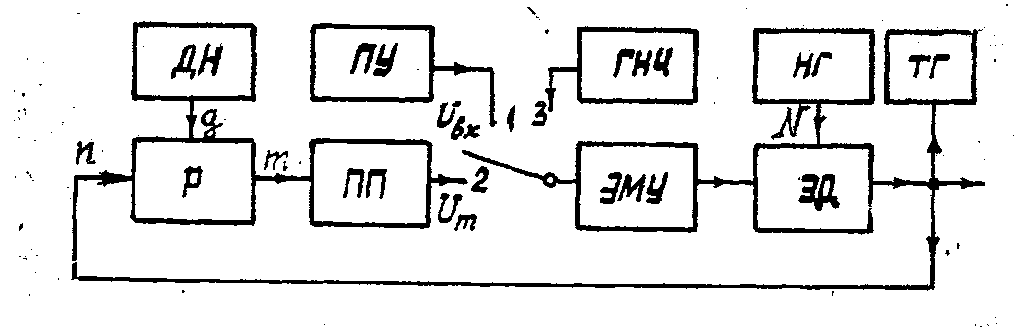
Рис.1. Функциональная схема лабораторного стенда
Основной элемент здесь - регулятор частоты вращения судового дизеля Р. Входными сигналами для него будут: частота вращения вала n и затяжка пружины центробежного маятника g , которая изменяется с помощью устройства дистанционной настройки (ДН). Выходным сигналом регулятора является перемещение муфты регулятора m , которое с помощью потенциометра (ПП) преобразуется в электрический сигнал Um. Этот сигнал усиливается электромашинным усилителем (ЭМУ) и поступает в электродвигатель (ЭД). Выходная координата электродвигателя - частота вращения вала - зависит не только от подаваемого на его вход напряжения, но и от нагрузки на двигатель N , которая формируется с помощью нагрузочного генератора (НГ). Ротор генератора жестко связан с валом электродвигателя. На вход ЭМУ вместо Um , можно подавать напряжение UВХ от управляющего потенциометра (ПУ), которое изменяется вручную, либо синусоидальный сигнал UГНУ от генератора низкой частоты (ГНЧ). В комплект измерительной аппаратуры входят вольтметры для измерения перечисленных выше напряжений, тахогенератор (TГ), осциллограф к самопишущий регистрирующий прибор.
2. Принципиальная схема стенда
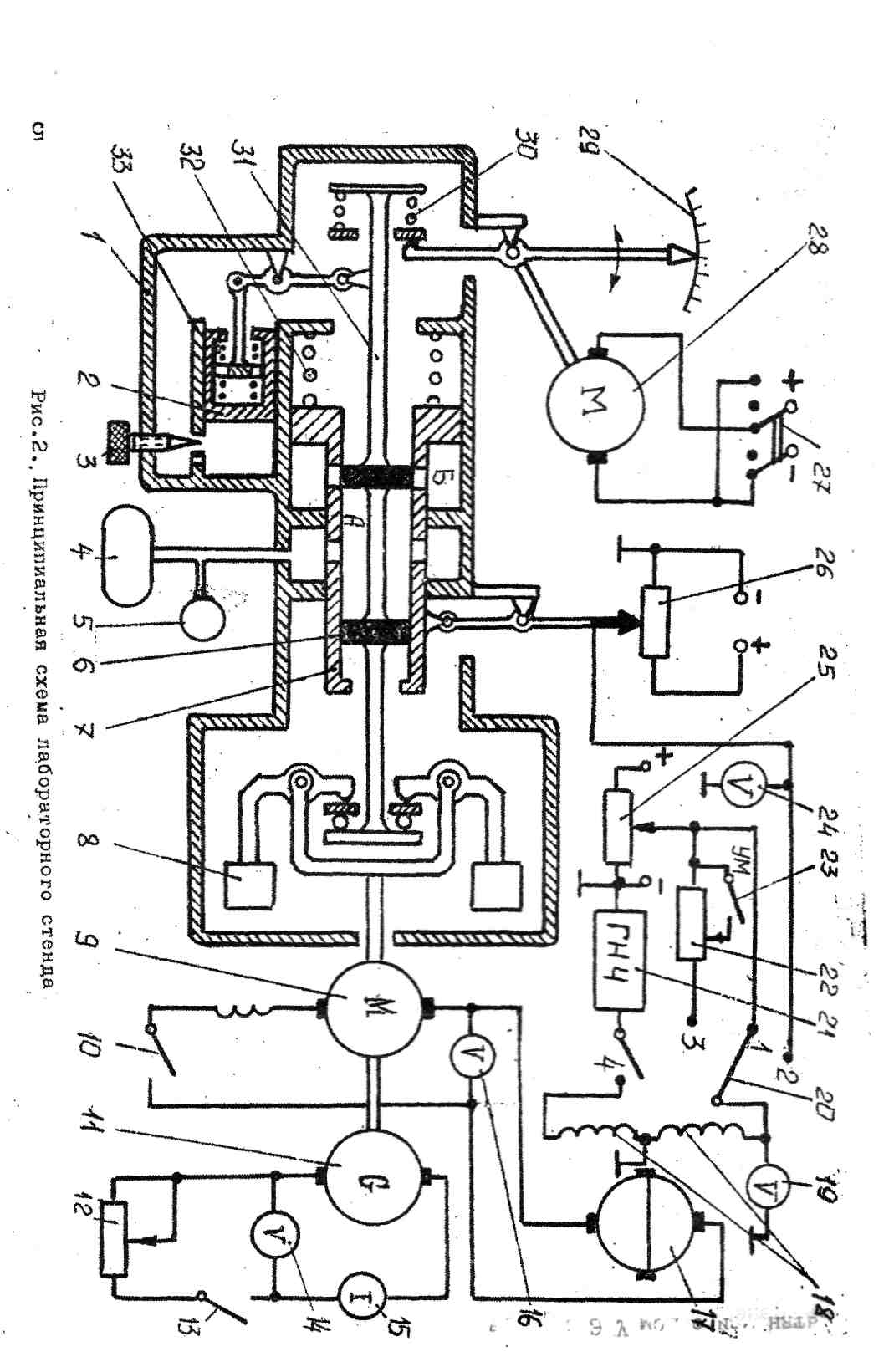
Упрощенная принципиальная электрическая схема стенда и принципиальная схема регулятора представлены на рис.2.
 На
этом рисунке обозначены: 1 - регулятор;
2 - поршень катаракта;
3 - игла катаракта; 4 - насос подачи масла
в регулятор; 5
- манометр контроля давления масла; 6 -
золотники гидравлического
усилителя; 7 - следящий сервопоршень; 8
- грузы центробежного
маятника; 9 - электродвигатель (М); 10
-тумблер для разжигания
цели электродвигателя;11 - нагрузочный
генератор (G);
12
- нагрузочный реостат; 13 - тумблер для
ступенчатого сброса и включения нагрузки;
14 - вольтметр для измерения напряжения
на
клеммах генератора; 15 - амперметр для
измерения тока в цепи якоря
генератора; 16 - вольтметр для измерения
напряжения, подаваемого на М;
17
- электромашинный усилитель (ЭМУ); 18 -
обмотка управления (ОУ) ЭМУ; 19 - вольтметр
для измерения напряжения
на ОУ ЭМУ; 20 - переключатель питания ОУ
ЭМУ; 21 - генератор
низкой частоты (ГНЧ); 22 - потенциометр
для регулирования величины
скачкообразного изменения напряжения
на входе в ЭМУ;23 - тумблер для подачи
скачкообразного воздействия на вход
ЭМУ;
24
- вольтметр для измерения напряжения,
пропорционального перемещению
сервопоршня; 25 - потенциометр для
изменения напряжения на
входе в ЭМУ; 26 - потенциометр, преобразующий
перемещение следящего
сервопоршня в электрический сигнал -
напряжение Um
; 27 - тумблер
для изменения задающего воздействия g
-
изменения затяжки
настроечной пружины регулятора; 28 -
электродвигатель для изменения задающего
воздействия; 29 - шкала для измерения
величины
g
; 30 - настроечная пружина; 31 - муфта
центробежного маятника;
32 - силовая пружина сервомотора; 33 -
катаракт.
На
этом рисунке обозначены: 1 - регулятор;
2 - поршень катаракта;
3 - игла катаракта; 4 - насос подачи масла
в регулятор; 5
- манометр контроля давления масла; 6 -
золотники гидравлического
усилителя; 7 - следящий сервопоршень; 8
- грузы центробежного
маятника; 9 - электродвигатель (М); 10
-тумблер для разжигания
цели электродвигателя;11 - нагрузочный
генератор (G);
12
- нагрузочный реостат; 13 - тумблер для
ступенчатого сброса и включения нагрузки;
14 - вольтметр для измерения напряжения
на
клеммах генератора; 15 - амперметр для
измерения тока в цепи якоря
генератора; 16 - вольтметр для измерения
напряжения, подаваемого на М;
17
- электромашинный усилитель (ЭМУ); 18 -
обмотка управления (ОУ) ЭМУ; 19 - вольтметр
для измерения напряжения
на ОУ ЭМУ; 20 - переключатель питания ОУ
ЭМУ; 21 - генератор
низкой частоты (ГНЧ); 22 - потенциометр
для регулирования величины
скачкообразного изменения напряжения
на входе в ЭМУ;23 - тумблер для подачи
скачкообразного воздействия на вход
ЭМУ;
24
- вольтметр для измерения напряжения,
пропорционального перемещению
сервопоршня; 25 - потенциометр для
изменения напряжения на
входе в ЭМУ; 26 - потенциометр, преобразующий
перемещение следящего
сервопоршня в электрический сигнал -
напряжение Um
; 27 - тумблер
для изменения задающего воздействия g
-
изменения затяжки
настроечной пружины регулятора; 28 -
электродвигатель для изменения задающего
воздействия; 29 - шкала для измерения
величины
g
; 30 - настроечная пружина; 31 - муфта
центробежного маятника;
32 - силовая пружина сервомотора; 33 -
катаракт.
С помощью переключателя 20 можно замыкать и размыкать систему регулирования оборотов. В положении I система разомкнута и напряжение на управляющей обмотке 18 ЭМУ 17 изменяется вручную с помощью потенциометра 25. В положении 2 система замкнута - напряжение на обмотке управления ЭМУ снимается с потенциометра 26, движок которого связан с сервопоршнем 7 регулятора.
В положении 3 система разомкнута и напряжение на входе в ЭМУ можно изменять скачком с помощью тумблера 23.
Работа замкнутой системы.Рассматриваемая система является системой автоматической стабилизации, так как ее задача - поддерживать постоянной частоту вращения вала электродвигателя. Заданное значение частоты вращения вала n определяется, величиной задающего воздействия g - затяжкой пружины 30 центробежного маятника ( см.рис.2). Если по какой-либо причине, например при изменении нагрузки на электродвигатель, со стороны генератора, значение n отклонится от требуемого, то процесс восстановления регулируемой величины будет происходить следующим образом. При увеличении частоты вращения возрастет центробежная сила грузов, что вызовет перемещение золотников 6 вправо. Откроется слив масла из полости Б, что вызовет перемещение сервопоршня 7 вправо под действием пружины 32.Сервопоршень жестко связан с движком потенциометра 26, и, если система замкнута, т.е. переключатель 20 в положении 2, такое перемещение движка потенциометра вызовет уменьшение напряжения на управляющей обмотке ЭМУ, что приведет к уменьшению напряжения на выходе ЭМУ и напряжения, подаваемого на вход электродвигателя. Частота вращения вала начнет уменьшаться, и золотник 26 сместится влево. На установившихся режимах золотники расположены точно против окон в корпусе сервопоршня и перекрывают подвод и слив масла из полости Б.
В случае отклонения значения отклонения значения n в меньшую сторону от требуемого значения снижается центробежная сила грузов и золотник 6 перемещается влево, что приводит к открытию окон в корпусе сервопоршня, и рабочая жидкость - масло начнет поступать из полости А в полость Б, вследствие чего сервопоршень сместится влево и увеличится напряжение на управляющей обмотке ЭМУ и на клеммах электродвигателя. Частота вращения вала начнет возрастать и в конечном счете восстановится с точностью до статической ошибки регулирования.
Катаракт 33 служит для изменения динамических свойств регулятора, так как позволяет изменять коэффициент вязкого трения центробежного маятника. Перемещение золотника 6 связано с перемещением поршня катаракта 2.
Интенсивность процесса регулирования можно существенно изменить с помощью иглы катаракта 3, положение которой определяет скорость протекания масла через игольчатый клапан.
Общий вид лицевой панели стенда показан на рис.3. Здесь же расположены измерительные приборы и органы управления. В левой части находится ваттметр I, который измеряет мощность, потребляемую электроприводом ЭМУ, справа от ваттметра - измеритель частоты вращения вала электродвигателя 2
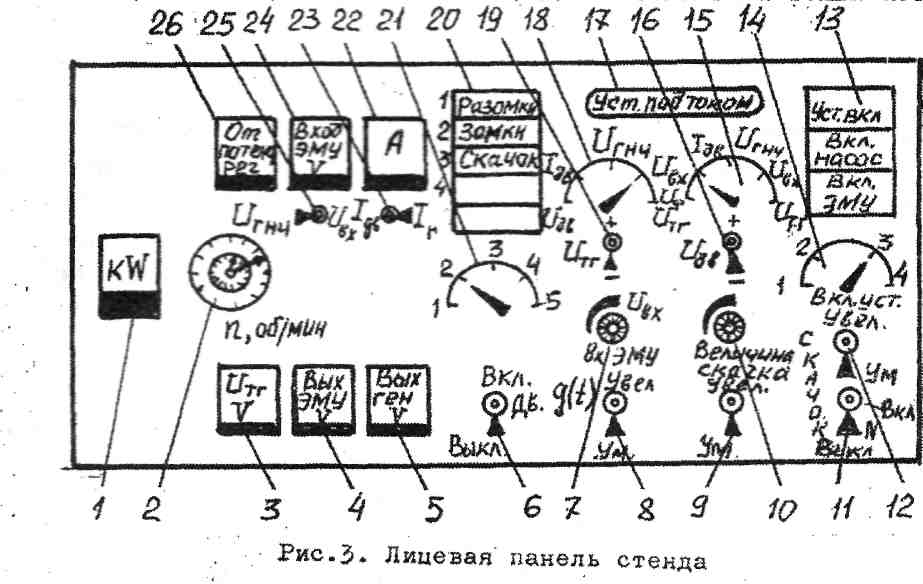
На панели расположены следующие приборы (цифры в скобках обозначение данного прибора на принципиальной схеме стенда приведенной на рис.2):
- вольтметр 26 (24), измеряющий напряжение на потенциометре (26), связанном с, сервопоршнем (7) регулятора, Um;
- вольтметр 24 (19), измеряющий либо напряжение, подаваемое на управляющую обмотку ЭМУ, UВХ при разомкнутой системе, либо напряжение, подаваемое на вторую управляющую обмотку от генератора низкой частоты, UГНЧ. Переключающий тумблер находится под прибором 24;
- амперметр 22 (15), который в зависимости от положения тумблера под ним. измеряет либо силу тока в цепи якоря электродвигателя Iдв ,
либо в цепи якорянагрузочного генератора (II);
- вольтметр 3, измеряющий напряжение на клеммах тахогенератора UТГ;
- вольтметр 4 (16), измеряющий напряжение на выходе ЭМУ,Uдв;
- вольтметр 5 (14), измеряющий на клеммах генератора Uг.
Кроме того, на панели управления находятся:
- переключатель рода лабораторных работ 21 и соответствующее световое табло 20;
- два переключателя 15 и 16 вывода на осциллограф измеряемых токов и напряжений;
- два тумблера 16 и 19, позволяющие изменять знаки напряжений UТГ и UДВ;
- переключатель включения установки 14 подачи питания к стенду – положение I, включения масляного насоса – положение 2 и включения ЭМУ – положение 3.Над переключателем установлено световое табло 13.
На панель выведены рукоятки трех потенциометров:
- потенциометра 7 (25), с помощью которого можно изменять напряжение на управление обмотке ЭМУ при разомкнутой системе – величину Uвх;
- потенциометр 10 (22), с помощью которого можно регулировать величину ступенчатого изменения напряжения на входе в ЭМУ ( “величину скачка”).
На пульте управления также установлены:
- тумблер 6 (10) разрыва цепи якоря двигателя ( “Двигатель”, “Вкл.”, “Выкл.”);
- тумблер сброса нагрузки 11(13), который разрывает цепь якоря генератора
( “N”, ”Вкл.- Выкл.” );
- тумблер 12 (23), с помощью которого производится ступенчатое изменение напряжения на управляющей обмотке ЭМУ (“Скачок”,”Увел.-Уменьш.”);
- тумблер 8 (27) для дистанционного изменения задающего воздействия – изменения величины затяжки пружины регулятора (“g(t)” ,“Увел-Уменьш.”);
- тумблер 9 управления нагрузочным реостатом (12) в цепи якоря генератора (“g(t)”,”Увел.-Уменьш.”) .
Лабораторная работа № I
ЭКСПЕРИМЕНТАЛЬНОЕ ПОСТРОЕНИЕ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК
ЭЛЕМЕНТОВ СИСТЕМЫ
Цель работы:
Изучить устройство регулятора и работу разомкнутой системы автоматического регулирования (САР).
Изучить назначение приборов и переключателей по рис.2 и 3.
Построить статические характеристики объекта регулирования и регулятора.
Краткие сведения, необходимые для выполнения работы
Статической характеристикой элемента называется зависимость выходной координаты от входной, снятая на установившихся режимах. Статические характеристики могут быть представлены графически или аналитически. Если входных сигналов у элемента два, а выходной один, статическая характеристика представляет собой семейство кривых.
Прежде чем снимать статические характеристики, необходимо разбить систему на отдельные элементы, определить их входные и, выходные сигналы.
Для снятия статических характеристик отдельных элементов следует разомкнуть систему для того, чтобы иметь возможность в широком интервале изменять входные и выходные сигналы всех звеньев системы. Размыкание системы производят переключателем 20 (см рис.2), установив его в положение I "Система разомкнута". В этом случае на вход ЭМУ поступает напряжение не с потенциометра 26, а напряжение UВХ, снимаемое с потенциометра 25, движок которого перемещается рукояткой 7 (рис.3). Функциональная схема разомкнутой системы представлена на рис.4.
Данную систему можно представить в виде четырех основных элементов, включенных последовательно: сам регулятор Р (1,см. рис.2), преобразующий потенциометр ПП (26 на рис.2), электромашинный усилитель ЭМУ (17 на рис.2) и электродвигатель ЭД (9 на рис.2).
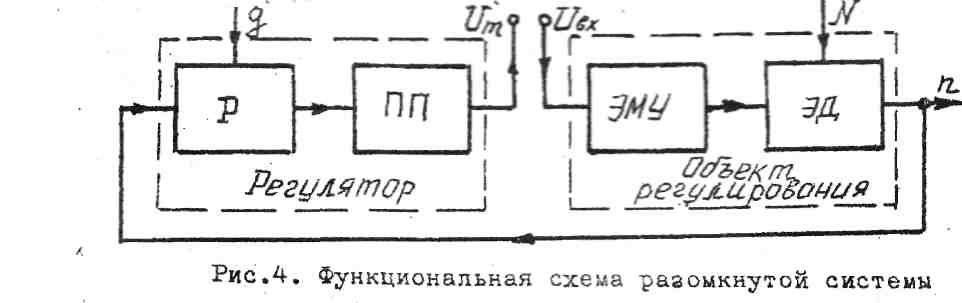
 Для
уменьшения объема работы разобьем
систему на два элемента - регулятор
и объект регулирования; будем считать
выходным сигналом регулятора не
перемещение сервопоршня, которое через
рычаг перемещает движок потенциометра
26 (см.рис.2), а электрический сигнал на
выходе потенциометра - напряжение Uт
,т.е.
отнесем
преобразующий потенциометр к регулятору,
Объектом регулирования
будем считать систему ЭМУ - ЭД.
Для
уменьшения объема работы разобьем
систему на два элемента - регулятор
и объект регулирования; будем считать
выходным сигналом регулятора не
перемещение сервопоршня, которое через
рычаг перемещает движок потенциометра
26 (см.рис.2), а электрический сигнал на
выходе потенциометра - напряжение Uт
,т.е.
отнесем
преобразующий потенциометр к регулятору,
Объектом регулирования
будем считать систему ЭМУ - ЭД.
Входными сигналами в регулятор будут; п - частота вращения вала двигателя и g - затяжка пружины центробежного маятника (задающее воздействие), а выходными - напряжение Uт .
В объект регулирования на вход поступает напряжение UВХ , которое изменяется вручную потенциометром 25 (см.рис.2) и N=UГ IГ - нагрузка со стороны генератора на электродвигатель.
Таким образом, необходимо получить зависимость n=n(UВХ,n)- статическую характеристику объекта и зависимость Um=Um(n,g) -статическую характеристику регулятора.
 Порядок
выполнения работы
Порядок
выполнения работы
1.Включить стенд. Для этого переключатель 14 (см.рис.3"Включение установки") последовательно включить в положения 1,2,3.При этом на световом табло 13 последовательно загорятся сигнальные лампы "Установка включена", "Выключен масляный насос" и "Включен ЭМУ".
2.Замкнуть цепь ЭД тумблером 6 (см.рис.З).
3. Установить переключатель 21 (20. на рис.2) рода работ в положение I. На световом табло загорится лампочка "Система разомкнута".
4.Снять статическую характеристику объекта регулирования n=n(UВХ,N).
Удобнее снимать зависимость п от нагрузки N=UГIГ для фиксированных значений UВХ . Устанавливаем заданное преподавателем значение UВХ и изменяем нагрузку от нуля до максимальной. Для этого вначале получаем данные, когда цепь якоря нагрузочного генератора разомкнута (N= 0, так как IГ = 0), Затем тумблер I3 (см.рис.2) в цепи якоря генератора замыкаем (тумблер II в положение "Вкл." – см.рис.3) и устанавливаем с помощью нагрузочного реостата 12 (см.рис.2) различные значения N. Движок реостата перемещаем с помощью тумблера 9 (см. рис. 3). Снятые данные записать в табл.1 для пяти UВХ , значения которых задаются преподавателем

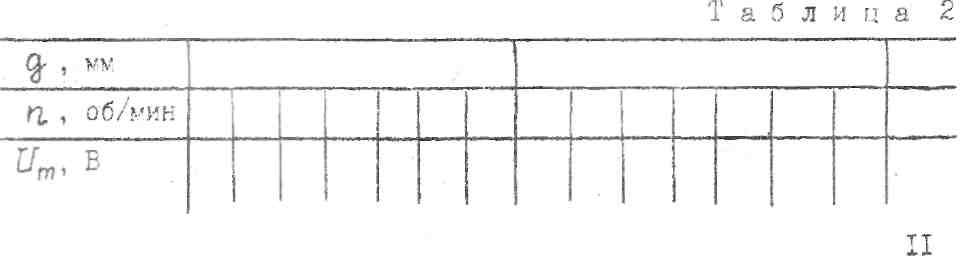
5. Снять статическую характеристику регулятора и представить ее в виде графика зависимости Um от n для двух различных значений задающего воздействия g - затяжки пружины центробежного маятника. Значения g, задаются преподавателем и устанавливаются с помощью тумблера 8 (см. рис.3), которые подает питание на электродвигатель 28 (см. рис.2). Далее устанавливаем g=g1 и с помощью потенциометра 7 "Bх. ЭМУ" (см.рис.3) изменяем частоту вращения вала двигателя от начала автоматической работы (НАР) регулятора, когда его муфта 31 (см.рис.2), а следовательно, и сервопоршень 7 стоят на своем нижнем упоре (точка I на рис.7), а Um имеет свое максимальное знчение. В интервале nНАР< n<nКАР снимается статическая характеристика регулятора. Здесь nНАР - частота вращения вала двигателя, когда центробежная сила груза станет равной усилию от настроечной пружины 30 (см.рис.2), а nКАР - значение n в конце автоматической работы регулятора при данной затяжке g , когда муфта маятника и сервопоршень стоят на своем верхнем упоре и Um = 0. Данные записать в табл. 2.
Обработка экспериментальных данных
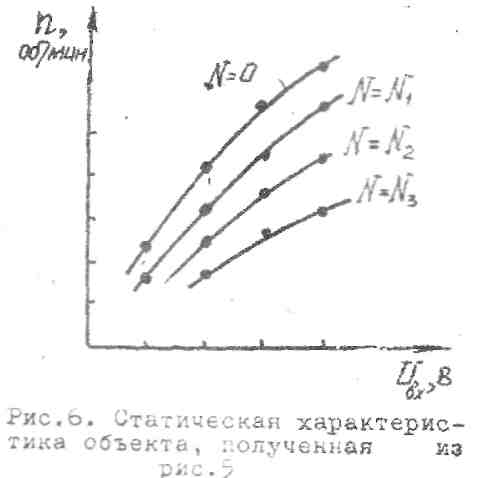
По данным табл.1 строим зависимость n=n(N,Uвх) - рис.5. Рассекая полученные на рис.5 зависимости прямыми N=const, получаем статическую характеристику объекта в другом виде, представленном на рис.6.

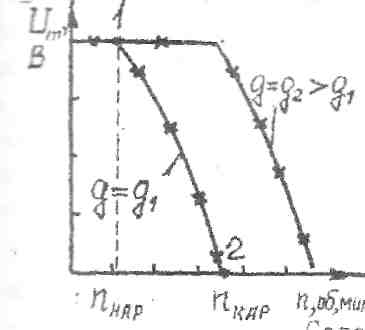

Статическую характеристику регулятора иллюстрируем графиком Um=Um(n,g) , примерный вид которого представлен на рис.7.
Содержание отчета
Отчет должен содержать:
цель лабораторной работы;
принципиальную схему лабораторного стенда;
экспериментальные данные;
статические характеристики регулятора и объекта регулирования.
Контрольные вопросы
1.Работа лабораторной установки по принципиальной схеме.
2.Устройство и принцип работы регулятора.
3. Классификация САР.
4. Понятие о статических характеристиках элементов САР.
5. Порядок проведения эксперимента.
6. Обработка экспериментальных данных.
Лабораторная работа № 2
ПОСТРОЕНИЕ И ЭКСПЕРИМЕНТАЛЬНАЯ ПРОВЕРКА СТАТИЧЕСКИХ ХАРАКТЕРИСТИКИ ЗАМКНУТОЙ СИСТЕМЫ
Цель работы:
1.Освоить методику аналитического построения статической характеристики замкнутой САР по статическим характеристикам отдельных элементов.
2. Проверить полученную зависимость экспериментальным путем.
Краткие сведения, необходимые для выполнения работы
Раздел теории, изучающий свойства систем автоматического регулирования на установившихся режимах, называется статикой систем регулирования в отлитие от динамики, рассматривающей вопросы, связанные с переходными режимами.
Под статической характеристикой замкнутой САР понимают функциональную зависимость регулируемой величины от задающего и возмущающих воздействий, снятую на установившихся режимах.
В зависимости от того, изменяется ли регулируемая величина в статике при изменении возмущающих воздействий или нет, системы делятся на статические и астатические. Если регулируемая величина на установившемся режиме не зависит от возмущающих воздействий, то такая система называется астатической, а если зависит, то статической. В последнем случае регулятор поддерживает регулируемую величину с точностью до статической ошибки регулирования.
Величина статической ошибки регулирования зависит от характеристики отдельных элементов САР и связана с характеристиками объекта регулирования и регулятора следующим соотношением:


Из рис.8 следует, что в данном случае использование регулятора не приводит к полному уничтожению статической ошибки, но уменьшает ее в (1+ kоб kp).
Из зависимости (I) видно , что статическая
ошибка регулирования ∆xS уменьшается с увеличением коэффициента усиления регулятора kp . Значение kp можно определить из статической характеристики регулятора как отношение приращения его выходной координаты Uт - управляющего сигнала к входной - регулируемой величине n - пори фиксированном значении задающего воздействия. Коэффициент усиления объекта
регулирования
kоб
-
это  отношение
приращения регулируемой величины к
приращению управляемого сигнала при
фиксированном значении возмущающего
воздействия N=
const.
Здесь kоб
определяется из статической
характеристики
объекта.
отношение
приращения регулируемой величины к
приращению управляемого сигнала при
фиксированном значении возмущающего
воздействия N=
const.
Здесь kоб
определяется из статической
характеристики
объекта.
Порядок выполнения работы
I. Построить график статической характеристики замкнутой системы, используя данные лабораторной работы № I.
В
данном случае это будет зависимость
частоты вращения вала n
электродвигателя от возмущающего
воздействия - нагрузки на двигатель N
,
полученная для разных значений задающего
воздействия g
– затяжки пружины  центробежного маятника. Если система
замкнута, напряжение
Um
пропорциональное перемещению муфты
регулятора, подается
на вход электромашинного усилителя,
т.е. в этом случае Um
=Uвх.
Поэтому
ось абсцисс на статической характеристике
объекта регулирования обозначим не
Uвх
, а
Um.
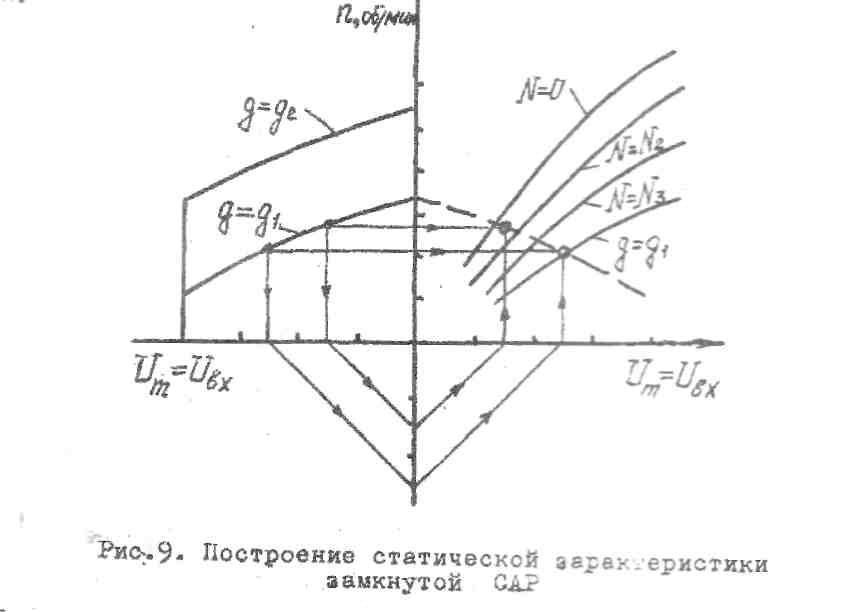
Для построения статической
характеристики замкнутой системы
n=n(N,g)
совместим
на общем
графике статическую характеристику
объекта регулирования и регулятора,
как показано на рисунке
9. Чтобы получить по характеристикам
отдельных элементов статическую
характеристику замкнутой системы,
необходимо выход данного звена связать
со входом последующего и таким образом
замкнуть контур. Построение n=n(N,g)
показано
на рис.9 стрелками.
центробежного маятника. Если система
замкнута, напряжение
Um
пропорциональное перемещению муфты
регулятора, подается
на вход электромашинного усилителя,
т.е. в этом случае Um
=Uвх.
Поэтому
ось абсцисс на статической характеристике
объекта регулирования обозначим не
Uвх
, а
Um.
Для построения статической
характеристики замкнутой системы
n=n(N,g)
совместим
на общем
графике статическую характеристику
объекта регулирования и регулятора,
как показано на рисунке
9. Чтобы получить по характеристикам
отдельных элементов статическую
характеристику замкнутой системы,
необходимо выход данного звена связать
со входом последующего и таким образом
замкнуть контур. Построение n=n(N,g)
показано
на рис.9 стрелками.
Вначале задаемся g=g1 , и каждому значению n будет соответствовать точка на поле статических характеристик объекта, которая определяет значение N.
Величину нагрузки определяем путем интерполяции, если точка попадает между кривыми. Выполняем далее такое же построение для g=g2 .
Такое построение выполняют обычно, если число элементов более двух. Если число элементов больше четырех, то используя правило построения статических характеристик группы звеньев, их число уменьшают до четырех.

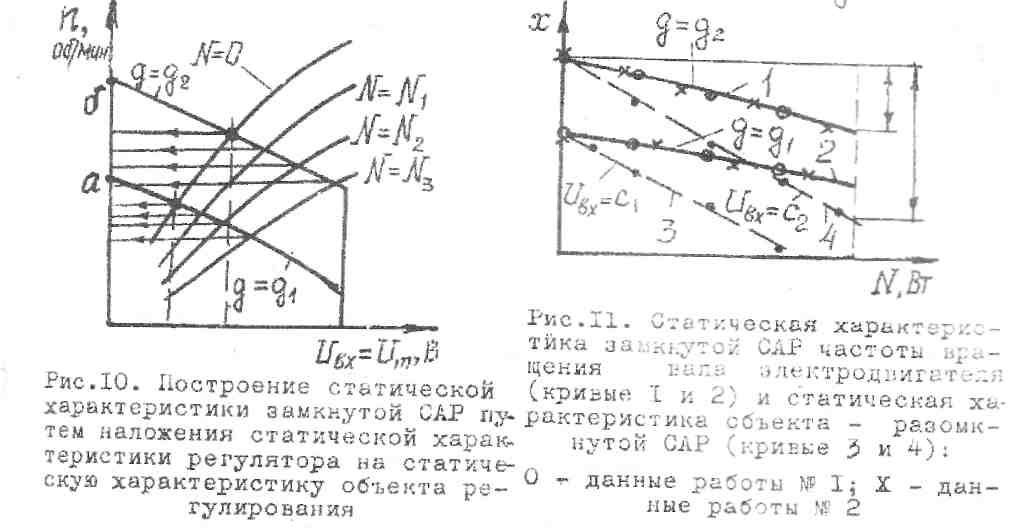
В рассматриваемом случае число звеньев равно двум - это объект регулирования и регулятор, поэтому построение статической характеристики замкнутой системы можно упростить: наложить статическую характеристику регулятора на статическую характеристику объекта (рис.10) и по точкам пересечения статической характеристики регулятора для g=g1 с кривыми N=const статической характеристики объекта определить значения n, соответствующие N=0, N=N1, N=N2, N=N3, N=N4 и т.п.
Полученные данные наносим на график n=n(N, g) – рис.11. Такое же построение выполняем и для других значений g.
2. Снять статическую характеристику замкнутой системы в следующей последовательности:
тумблер переключателя рода работ 21 (см.рис.3) устанавливаем в положение 2 - загорается табло "Система замкнута". В этом случае напряжение, снимаемое с потенциометра 26 (см.рис.2) движок которого соединен со следящим сервопоршнем 7, подается на управляющую обмотку ЭМУ;
устанавливаем тумблером 8 (см.рис.3) затяжку пружины центробежного маятника g=g1 такую же, как и при выполнении лабораторной работы № Г. Так как точная установка такого же значения g затруднена (недостаточная точность шкалы, люфт и зазоры в кинематических парах), то устанавливаем N=0 и изменяем g до тех пор, пока не выйдем на обороты, соответствующие точке а на рис.10;
изменяя нагрузку от 0 до максимального значения с использованием тумблеров 11 и 9 (см.рис.3), снимаем зависимость n от N при g=g1 .Нагрузка N = 0 устанавливается тумблером 11;
устанавливаем другие значения затяжки пружины - такие же, как и при выполнении лабораторной работы № I и повторяем измерения. Для точной установки g=g2 используем точку δ из рис.10. Данные заносим в табл.3.

Обработка экспериментальных данных
Рассчитав в табл.3 значения нагрузки N=UГIГ, наносим точки на построенную ранее статическую характеристику замкнутой системы автоматического регулирования (кривые 1 и 2,рис.11).
На этом же графике строим статическую характеристику объекта для Uвх=const (кривые 3 и 4), используя рис.6 или рис.10.Величину Uвх выбираем такой, чтобы статическая характеристика объекта при N=0 проходила через точки a и b (см.рис.11).
3.Для фиксированного значения N определяем ∆nS и ∆nS* для g=g1 и g=g2.
4.Используя формулу (I), определяем значение коэффициента разомкнутой системы kраз*=k обkр.
5.Из статической характеристики объекта регулирования определяем значение его коэффициента усиления по управляющему сигналу kоб=(∂n/∂Uвх)N=const и коэффициент усиления регулятора kр=(∂Um/∂n)g=const . Вычисляем значение kраз= kобkр и сравниваем с kраз*, полученным в п.4.
Содержание отчета
Отчет должен содержать:
цель лабораторной работы
принципиальную схему лабораторного стенда
порядок выполнения лабораторной работы
статическую характеристику замкнутой САР, построенную по статическим характеристикам объекта и регулятора
экспериментальную проверку статической характеристики замкнутой САР
значение полученного коэффициента усиления разомкнутой системы.
Контрольные вопросы
Понятие о статической характеристике замкнутой системы.
Построение статической характеристики замкнутой системы по статическим характеристикам объекта и регулятора.
Как определить коэффициент усиления объекта регулирования, регулятора и разомкнутой системы?
Как влияет коэффициент усиления регулятора на статическую ошибку регулирования?
Определить, какие должны быть коэффициент усиления регулятора, чтобы
статическая ошибка регулирования имела значении в 2 раза больше и в 2 раза меньше полученной в эксперименте.
Лабораторная работа №3
ЭКПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ОБЪЕКТА РЕГУЛИРОВАНИЯ, ВЫБОР ЗАКОНА РЕГУЛИРОВАНИЯ И РАСЧЕТ ПАРАМЕТРОВ НАСТРОЕК РЕГУЛЯТОРА
Цель работы:
Изучить методику экспериментального получения приближенного математического описания многоемкостных объектов.
Изучить инженерный метод выбора закона регулирования и расчета параметров настроек регуляторов непрерывного действия.
Краткие сведения, необходимые для выполнения работы