

I. Характеристики объектов регулирования
Большинство промышленных объектов можно представить в виде элементов, которые являются аккумуляторами вещества или энергии. Многоемкостный объект состоит из нескольких таких аккумуляторов.
Динамические и статические свойства объекта регулирования описываются дифференциальными уравнениями. Для многоемкостных объектов эти уравнения имеют высокий порядок.
При решении большинства технических задач сложный многоемкостный объект обычно представляют одним или двумя типовыми динамическими звеньями, которые имеют приблизительно такой же переходный процесс при подаче на вход такого же возмущающего воздействия. Одним из видов такого воздействия является скачкообразное (ступенчатое) изменение входного сигнала. В зависимости от реакции на такой входной сигнал большинство объектов можно разделить на два вида:
- объекты с самовыравниванием (статические), у которых регулируемая величина после окончания переходного процесса переходит к новому установившемуся значению (теплообменные аппараты, помещения, двигатели внутреннего сгорания (ДВС) и газотурбинные двигатели (ГТД) как объекты регулирования частоты вращения на больших частотах вращения);
- объекты без самовыравнивания (астатические), когда после изменения входного воздействия стабилизируется только скорость изменения регулируемой величины (емкость с жидкостью как объект регулирования уровня, если приток и сток не
зависят от уровня, ДВС к ГТД как объекты регулирования частоты вращения на малых частотах вращения и др.).
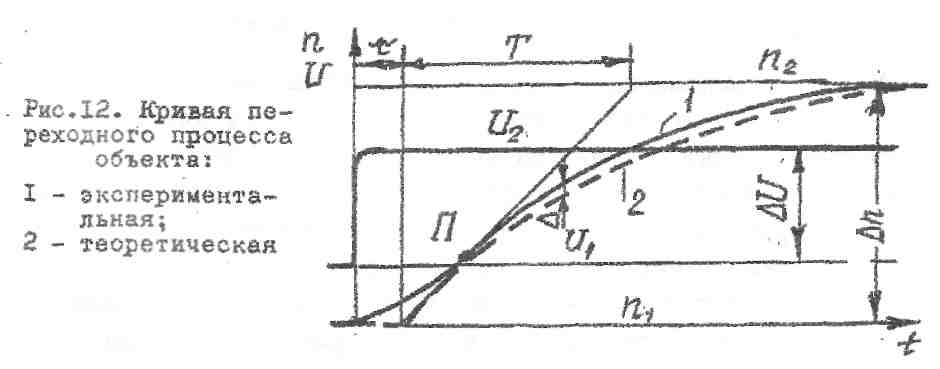
Статический объект можно представить апериодическим звеном первого порядка с последовательно включенным звеном чистого запаздывания (рис.12). Уравнения такого объекта в абсолютных отклонениях переменных в общем случае будет иметь вид

где х - регулируемая величина; y - управляющее воздействие;f - возмущающее воздействие; τ - время запаздывания; Т - постоянная времени; kоб,kобf - коэффициенты передачи по управляющему и возмущающему воздействиям.
 В
лабораторной установке в объект
регулирования входят электромашинный
усилитель (ЭМУ) и двигатель (Д) постоянного
тока. Ре
В
лабораторной установке в объект
регулирования входят электромашинный
усилитель (ЭМУ) и двигатель (Д) постоянного
тока. Ре гулируемой
величиной x
является
абсолютное отклонение частоты вращения
∆n
,
управляющим воздействием y
-
изменение
гулируемой
величиной x
является
абсолютное отклонение частоты вращения
∆n
,
управляющим воздействием y
-
изменение
напряжения на входе ЭМУ - ∆U, возмущающим воздействием f - изменение нагрузки на валу двигателя ∆N, необходимой для вращения генератора.
Уравнение (I) объекта регулирования в этом случае примет вид

2. Регуляторы и их законы регулирования
В промышленных замкнутых системах регулирования используют регуляторы непрерывного, импульсного и релейного действия.
В регуляторах непрерывного действий между выходными и входными величинами существует непрерывная функциональная связь, называемая законом (алгоритмом) регулирования. Таким образом, характер работы регулятора определяется законом регулирования,т.е. уравнением, по которому он вводит в объект регулирующее воздействие y. Работа регулятора при данном законе зависит от значений постоянных коэффициентов, входящих в уравнение и называемых параметрами настройки регулятора. Конструкция промышленного регулятора позволяет изменять настройки в широких пределах.
Регуляторы непрерывного действия, которые получили наибольшее распространение, подразделяют в соответствии с законами регулирования:
- регулятор пропорционального действия (П- регуляторы), либо статические, выходная величина у которых соответственно в общем виде и применительно к системе лабораторной установки связана с входной по закону
![]()
- регуляторы интегрального действия (И - регуляторы) , или астатические, действуют по закону

 -
регуляторы пропорционально-интегрального
действия (ПИ-регуляторы),
или изодромные,
совмещают оба рассмотренных выше
закона регулирования:
-
регуляторы пропорционально-интегрального
действия (ПИ-регуляторы),
или изодромные,
совмещают оба рассмотренных выше
закона регулирования:

- регуляторы пропорционально-интегрально-дифференциального действия (ПИД - регуляторы), или изодромные с предварением, имеют закон

 Если
в законе регулирования имеется И -
составляющая, то система является
астатической.
Если
в законе регулирования имеется И -
составляющая, то система является
астатической.
В уравнениях (3)-(6) kp, kp1, kp2 - коэффициенты передач называемые параметрами настройки.