

54. Топологическое проектирование рэс (компоновка, размещение, трассировка), как задачи структурной оптимизации.
Для задачи компоновки (разбиения) исходной является схема соединений конструктивных элементов на некотором иерархическом уровне конструкторского проектирования. Эту схему необходимо разделить на части, чтобы образовать конструктивные узлы следующего иерархического уровня с учетом определенных требований и ограничений.
Критерии, позволяющие оценить качество решения задачи разбиения, следующие: 1) количество внешних связей, характеризуемое числом межузловых соединений и числом внешних выводов всех узлов; 2) объем конструкции, характеризуемый числом узлов разбиения; 3) число различных типовых узлов.
Первые два критерия являются наиболее распространенными. Дополнительно задаются ограничения, связанные с конкретным конструкторско-технологическим уровнем проектирования. Основными из них являются допустимые числа элементов и внешних выводов в узле.
После распределения конструктивных элементов РЭА по коммутационным пространствам различного уровня иерархии, для каждой полученной в результате компоновки сборочной единицы производят размещение включенных в ее состав элементов предыдущего уровня, т. е. выбирают такое их взаимное расположение, при котором наилучшим образом учитываются предъявляемые к аппаратуре требования.
Задача сводится к отысканию для каждого размещаемого элемента таких позиций, при которых оптимизируется выбранный показатель качества и обеспечиваются наиболее благоприятные условия для последующего электрического монтажа. Особое значение эта задача приобретает при проектировании аппаратуры на печатных платах.
Для получения оптимальной трассировки используют следующие критерии:
1) минимум суммарной взвешенной длины соединений;
2) минимум числа соединений, длина которых больше заданной;
3) минимум числа пересечений проводников;
4) максимальное число соединений между элементами, находящимися в соседних позициях либо в позициях, указанных разработчиком;
5) максимум числа цепей простой конфигурации.
Наибольшее распространение в алгоритмах размещения получил первый критерий, что объясняется следующими причинами: уменьшение длин соединений улучшает электрические характеристики устройства, упрощает трассировку печатных проводников и снижает трудоемкость изготовления печатных плат; кроме того, он сравнительно прост в реализации.
В общем виде задача размещения конструктивных элементов на коммутационной плате формулируется следующим образом. Задано множество конструктивных элементов R = {rl, r2, .... rn} и множество связей между этими элементами V = {v1, v2, ...,vp},a также множество установочных мест (позиций) на коммутационной плате Т = {tl, t2, … tk}. Найти такое отображение множества R на множестве Т, которое обеспечивает экстремум целевой функции F.
Если критерием качества размещения является минимум суммарной взвешенной длины соединений, то задача состоит в минимизации
![]()
Вся площадь платы разбивается на ряд областей (позиций), число которых должно быть не меньше числа размещаемых элементов
В результате получим фиксированные позиции для установки элементов.
По принципам реализации известные алгоритмы размещения можно разделить на алгоритмы, использующие непрерывно-дискретные и дискретные методы оптимизации (рис. 4.10). Эффективность того или иного алгоритма обычно оценивают по результатам решения типовых конструкторских задач.
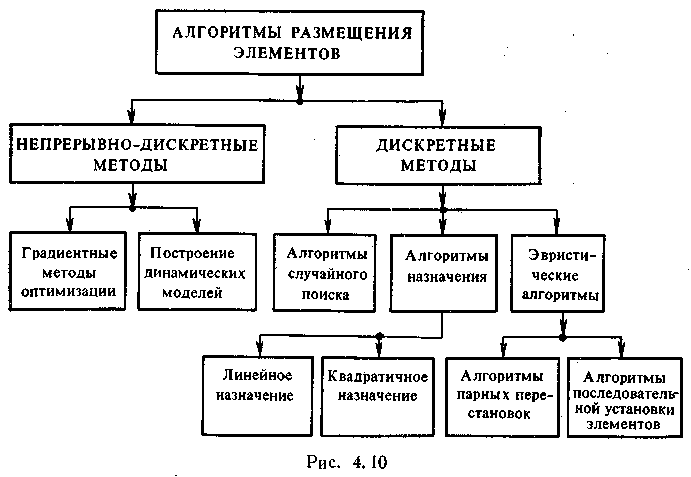
При использовании непрерывно-дискретных методов оптимизации задача размещения решается в два этапа; на первом этапе определяют координаты местоположения центров элементов, при которых целевая функция F имеет экстремальное значение; на втором — полученные координаты «округляются» в фиксированные целочисленные значения координатной сетки, нанесенной на поверхность коммутационной платы {отсюда и название методов). Наибольшее развитие получили градиентные методы и методы, использующие построение динамических моделей.
К достоинствам градиентных методов относятся сравнительно небольшие затраты машинного времени на отыскание экстремума целевой функции, а также наличие стандартных программ для решения данного класса задач. Недостатками этой группы алгоритмов являются: возможность получения лишь локального экстремума; низкая эффективность при пологом экстремуме, большая неравномерность распределения элементов на плате до «округления» координат.
В связи с указанными недостатками в чистом виде градиентные методы для решения задач размещения не используют. Их применяют в сочетании с методами случайного поиска, отыскивая при этом глобальный экстремум целевой функции.
Алгоритмы, использующие динамические модели. В основу этой группы алгоритмов положен динамический метод В. С. Линского. Процесс размещения элементов на плате представляется как движение к состоянию равновесия системы материальных точек (элементов), на каждую из которых действуют силы притяжения и отталкивания, интерпретирующие связи между размещаемыми элементами.
Задача оптимального размещения элементов сводится к нахождению такого местоположения точек, при котором равнодействующие всех сил обращаются в нуль. Решение задачи осуществляют в три этапа. На первом этапе, используя критерий минимума суммарной взвешенной длины связей, производят размещение материальных точек на условном поле позиций без учета требования равномерности их распределения по поверхности и попадания точек в фиксированные позиции поля. Полученное решение используют в качестве начального размещения на втором этапе, где на материальные точки начинают действовать силы притяжения и отталкивания. Под влиянием этих сил точки начинают перемещаться к положению равновесия системы, при котором обеспечивается приемлемая степень равномерности их размещения на поле позиций. На третьем этапе точки сдвигаются в фиксированные позиции платы при минимально возможных изменениях их взаиморасположения.
К достоинствам метода относятся возможность получения глобального экстремума целевой функции, а также сведение поиска к вычислительным процедурам, для которых имеются разработанные численные методы. Недостатками являются трудоемкость метода и сложность его реализации (подбора коэффициентов для силовых связей); необходимость фиксирования местоположения некоторого числа конструктивных элементов на плате для предотвращения большой неравномерности их размещения на отдельных участках платы.
Алгоритмы случайного поиска. Принципиально возможны два способа реализации многомерного случайного поиска глобального оптимума многоэкстремальной целевой функции. Первый способ — гомеостатический, реализующий идею слепого поиска, который заключается в случайном переборе допустимых значений параметров с фиксацией наилучшего достигнутого результата F(X) и соответствующих значений X.
Алгоритмы слепого поиска решают задачу размещения следующим образом. Выбирают наугад какую-либо позицию монтажной плоскости из числа незанятых и на ней закрепляют (по порядку, начиная с первого) подлежащий размещению элемент. Эту операцию продолжают до тех пор, пока все конструктивные элементы не будут установлены. Вычисленное для каждого вновь найденного варианта размещения значение целевой функции сравнивают с наилучшим результатом, достигнутым на предыдущих шагах. Если имеет место улучшение значения целевой функции, то данное размещение запоминают, в противном случае — отбрасывают как неудачное.
Алгоритмы случайного блуждания позволяют снизить трудоемкость поиска оптимального решения вследствие учета характерных особенностей оптимизируемой функции.
Комбинированные алгоритмы случайного поиска состоят из двух процедур: процедуры глобального поиска — случайного распределения элементов на коммутационном поле и процедуры спуска (подъема) в локальный экстремум оптимизируемой функции, что может осуществляться как с помощью регулярных алгоритмов (градиентные методы), так и путем использования алгоритмов случайного поиска (методы статистического градиента, спуска по наилучшей пробе и т. п.).
Алгоритмы назначения. Развитию данной группы алгоритмов способствовало наличие у современных ЭВМ типовых программ, реализующих их решение.
Алгоритмы линейного назначения основаны на комбинаторно-аналитическом алгоритме Штейнберга, в котором объектами рассмотрения являются несвязные подмножества конструктивных элементов, т. е. такие подмножества, для которых матрица связности С полностью состоит из нулей.
Алгоритмы квадратичного назначения основаны на использовании методов нелинейного программирования.
Эвристические алгоритмы. Практическая реализация всех рассмотренных алгоритмов размещения связана со значительными затратами машинного времени и памяти ЭВМ. Поэтому для размещения большого числа конструктивных элементов (n> 100) часто используют эвристические алгоритмы, позволяющие сократить время решения задачи при вполне приемлемом для практики качестве получаемого результата.
Итерационные алгоритмы имеют структуру, аналогичную итерационным алгоритмам компоновки. В них для улучшения исходного размещения элементов на плате вводят итерационный процесс перестановки местами пар элементов.
Последовательные алгоритмы основаны на допущении, что для получения оптимального размещения необходимо в соседних позициях располагать элементы, максимально связанные друг с другом. Сущность этих алгоритмов состоит в последовательном закреплении заданного набора конструктивных элементов на коммутационной плате относительно ранее установленных.
Алгоритмы, основанные на применении теории графов. В этих алгоритмах коммутационное пространство платы представляют в виде однородного графа Gr(Xr,Ur), отображающего координатную решетку, нанесенную на плату.