

5.3. Знаходження числових значення параметрів моделі об’єкта чисельним методом
Чисельні методи знаходження параметрів моделі заданої структури
В
практиці побудови моделей за
експериментальними значеннями кривої
розгону (або імпульсної перехідної
характеристики) може бути застосований
метод найменших квадратів (МНК). Згідно
з цим методом за виглядом експериментальної
кривої розгону обирають структуру
функції передачі
![]() ,
для якої встановлюють криву розгону і
формують суму квадратів різниць між
теоретичними
,
для якої встановлюють криву розгону і
формують суму квадратів різниць між
теоретичними
![]() та експериментальними
та експериментальними
![]() значеннями кривої розгону у задані
моменти часу
значеннями кривої розгону у задані
моменти часу
![]()
![]()
де
N
–
кількість експериментальних значень
кривої розгону;
![]() вектор
параметрів заданої функції передачі.
вектор
параметрів заданої функції передачі.
Згідно з МНК параметри функції передачі мають бути такими, щоб забезпечити найменше значення суми:
![]() .
.
Таким
чином, задача зводиться до пошуку значень
параметрів заданої функції передачі,
при яких забезпечується мінімальне
значення функції
![]() .
Її можна вирішувати аналітично або
чисельним методом. При аналітичному
методі по кожному з шуканих параметрів
знаходять похідні від функції
і прирівнюють їх до нуля. В результаті
отримують систему n
рівнянь (де n
– кількість невідомих параметрів),
.
Її можна вирішувати аналітично або
чисельним методом. При аналітичному
методі по кожному з шуканих параметрів
знаходять похідні від функції
і прирівнюють їх до нуля. В результаті
отримують систему n
рівнянь (де n
– кількість невідомих параметрів),
![]()
розв’язок, якої дозволяє знайти значення невідомих параметрів.
При чисельному методі знаходження параметрів моделі зручно скористатись пакетом Мatlab, в якому є програми, що дозволяють створювати функції передачі різної структури, знаходити їх перехідні функції, вирішувати оптимізаційні задачі. Параметри обраної моделі можна знайти, застосовуючи функцію fmins. Головна програма записана у script-файлі використовує функцію suma, в якій описано функцію s= суму квадратів відхилення між експериментальними та розрахунковими значеннями перехідних функцій. В основній програмі викликається функція fmins, яка знаходить такі значення параметрів моделі, при яких забезпечується мінімум функції suma. Пошук параметрів моделі здійснюється ітераційно за алгоритмом Нелдера-Міда. Знайдені за допомогою fminsearch параметри, записані в змінну х, і є шуканими параметрами заданої функції передачі.
Програма в середовищі Matlab (функція) для знаходження параметрів моделі
% summ
function s=summ(x);
yek=[175.07 175.07 176.23 177.44 178.81 180.23 181.64 183.42 184.01 185.50 186.39 187.78 188.86];
tek=[0 9 51 66 84 102 117 144 150 177 201 261 420];
yn=175.07;
dy=188.86-yn;
dx=15;
hek=(yek-yn)/dy;
t_i=[0:420];
hek_i=interp1(tek,hek,t_i);
T1=x(1); T2=x(2); tau=abs(x(3)); T3=x(4);
%% ПОБУДОВА КРИВОЇ РОЗГОНУ ЗА РОЗРАХОВАНИМИ к і T
[n,d]=pade(tau,10);
W_tau=tf(n,d);
W1=tf(1, [T1 1]);
W2=tf(1, [T2 1]);
W3=tf(1, [T3 1]);
W=W1*W2*W3*W_tau;
hroz=step(W,t_i);
s=sum((hroz'-hek_i).^2);
Програма в середовищі Matlab для знаходження параметрів моделі та побудови графіка порівняння експериментальної та розрахованої кривих розгону
%model
clear,clc
yek=[175.07 175.07 176.23 177.44 178.81 180.23 181.64 183.42 184.01 185.50 186.39 187.78 188.86];
tek=[0 9 51 66 84 102 117 144 150 177 201 261 420];
yn=175.07;
dy=188.86-yn;
dx=15;
hek=(yek-yn)/dy;
t_i=[0:420];
hek_i=interp1(tek,hek,t_i);
%% ЗНАХОДЖЕННЯ к і Т ЧИСЛОВИМИ МЕТОДАМИ
x0=[1 1 1 1];
x=fminsearch('summ',x0)
T1=x(1)
T2=x(2)
T3=x(4)
tau=abs(x(3))
k=dy/dx
%% ПОБУДОВА КРИВОЇ РОЗГОНУ ЗА РОЗРАХОВАНИМИ к і Т
[n,d]=pade(tau,10);
W_tau=tf(n,d);
W1=tf(1, [T1 1]);
W2=tf(1, [T2 1]);
W3=tf(1, [T3 1]);
W=W1*W2*W3*W_tau;
hroz=step(W,t_i);
y=hroz*dx*k+yn;
ye=hek_i*dx*k+yn;
del=max(abs(y'-ye))/dy*100
sig=sqrt(sum((y'-ye).^2)./length(t_i))
%% ПОРІВНЯННЯ КРИВОЇ РОЗГОНУ ЗНАЙДЕНОЇ ЧИСЛОВИМИ МЕТОДАМИ І ЕКСПЕРЕМЕНТАЛЬНОЇ
plot(t_i,y,'k',tek,yek,'o');grid;
title('Porivnjannja kruvux rozhony');
xlabel('t,c');ylabel('T,C');
legend('rozrahovana kryva rozgonu','eksperementalna kryva rozgonu')
Результат виконання програми:
x = 31.1259 31.1259 6.4666 70.7024
T1 = 31.1259 T2 = 31.1259 T3 = 70.7024 tau = 6.4666
k = 0.9193 del = 2.1989 sig = 0.1179
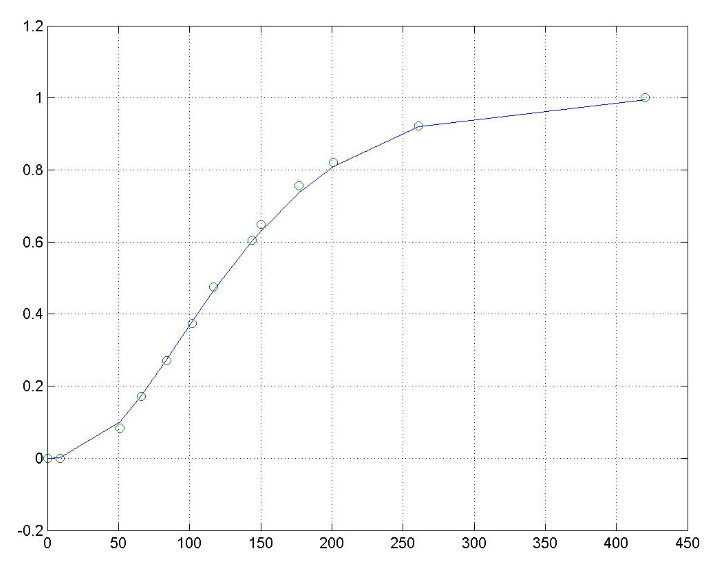
Рис.14 Експериментальна та розрахована криві розгону ОР