Дисбаланс в звеньях механизмов и его расчет
В предыдущем разделе были рассмотрены некоторые конструктивные особенности, связанные с реализацией механизмов в измерительных приборах, однако при конструировании, помимо преследования максимально достижимой точности следует помнить о необходимости минимизации суммарного момента дисбаланса. Появление момента дисбаланса связано с тем, что центр масс звена находится не на оси вращения и, таким образом, даже в неподвижном состоянии в механизме возникают внутренние нагрузки, обусловленные наличием гравитации.
На Рис.I-15 приведена конструкция рычага кулисного механизма тангенсного типа, с параллельными осями, модифицированного (подробно конструкция рассматривалась в предыдущем разделе).
|
Рис.I-15 – реализация рычага кулисного механизма |
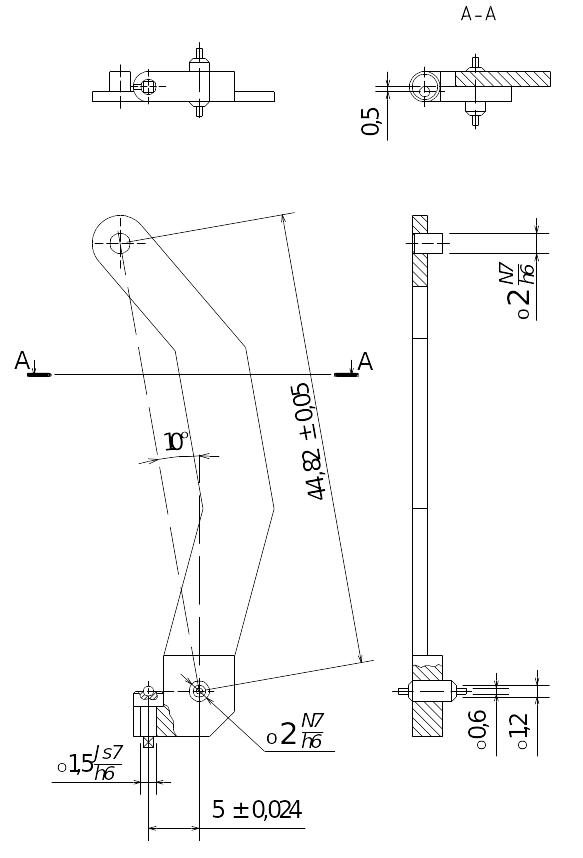
Большая часть изгибов и прочих, кажущихся, “излишеств” формы обусловлена конструкцией всего прибора в сборе (т.е. детали не должны задевать друг за друга, при этом быть компактными и легкими). Однако конструкция звена также играет решающую роль с точки зрения момента дисбаланса.
Номер фигуры |
1 |
2 |
3 |
4 |
Площадь (мм2) |
298,9 |
3,2 |
52,7 |
10,3 |
Объем (мм3) |
448,35 |
4,8 |
158,1 |
30,9 |
Масса* (г) |
3,519 |
0,0377 |
1,241 |
0,243 |
Вес (Н) |
0,0347 |
0,37∙10-3 |
0,0122 |
2,396∙10-3 |
Плечо (м) |
-0,43∙10-3 |
7,79∙10-3 |
0,16∙10-3 |
4,63∙10-3 |
Момент (Н∙м) |
-14,92∙10-6 |
2,88∙10-6 |
1,95∙10-6 |
11,09∙10-6 |
Сумма моментов (Н∙м) |
10-6 |
|||
* Плотность стали примерно равна 7,85∙10-3 (г/мм3) |
||||
Рассмотрим это звено с точки зрения дисбаланса, представляя, что ускорение свободного падения направлено вертикально вниз (см. Рис.I-16а).
|
Рис.I-16 – звено КМ (рычаг) в двух положениях; а - 0º, б – 30º; |
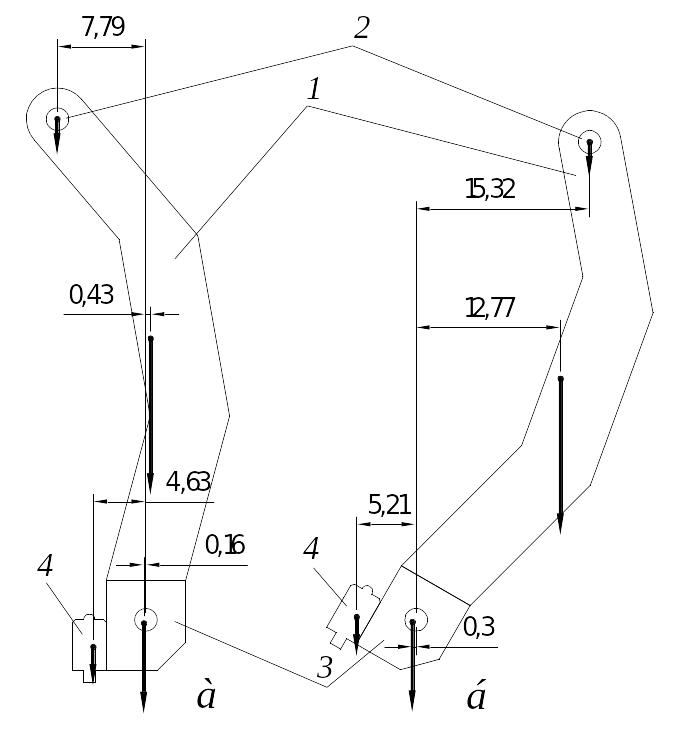
Мысленно разобьем конструкцию рычага на 4 части сверху вниз: цилиндр, плоская часть рычага, осевая часть рычага, эксцентрик и посадочное место под него.
Найдем центры масс указанных частей конструкции (в данном примере поиск осуществлялся средствами AutoCAD©). Найдем примерные площади и объемы данных сегментов. Результаты вычислений приведены в таблице ниже.
Как видно из таблицы, в таком положении звено достаточно хорошо сбалансировано – сумма моментов практически равна нулю, однако если рычаг (вместе со всем механизмом) наклонить на некоторый угол 30º, картина кардинально изменится. Рычаг в начальном и наклоненном положениях приводится на Рис.I-16а и б, соответственно.
Для положения в 30º таблица результатов расчета приведена ниже:
Номер фигуры |
1 |
2 |
3 |
4 |
Площадь (мм2) |
298,9 |
3,2 |
52,7 |
10,3 |
Объем (мм3) |
448,35 |
4,8 |
158,1 |
30,9 |
Масса* (г) |
3,519 |
0,0377 |
1,241 |
0,243 |
Вес (Н) |
0,0347 |
0,37∙10-3 |
0,0122 |
2,396∙10-3 |
Плечо (м) |
-12,77∙10-3 |
-15,22∙10-3 |
0,3∙10-3 |
5,21∙10-3 |
Момент (Н∙м) |
-443,12∙10-6 |
-5,63∙10-6 |
3,66∙10-6 |
12,48∙10-6 |
Сумма моментов (Н∙м) |
-432,61∙10-6 |
|||
* Плотность стали примерно равна 7,85∙10-3 (г/мм3) |
||||
Полученные результаты показывают, что такая балансировка справедлива только для положения 0º, для положения 30º суммарный момент дисбаланса резко возрастает.
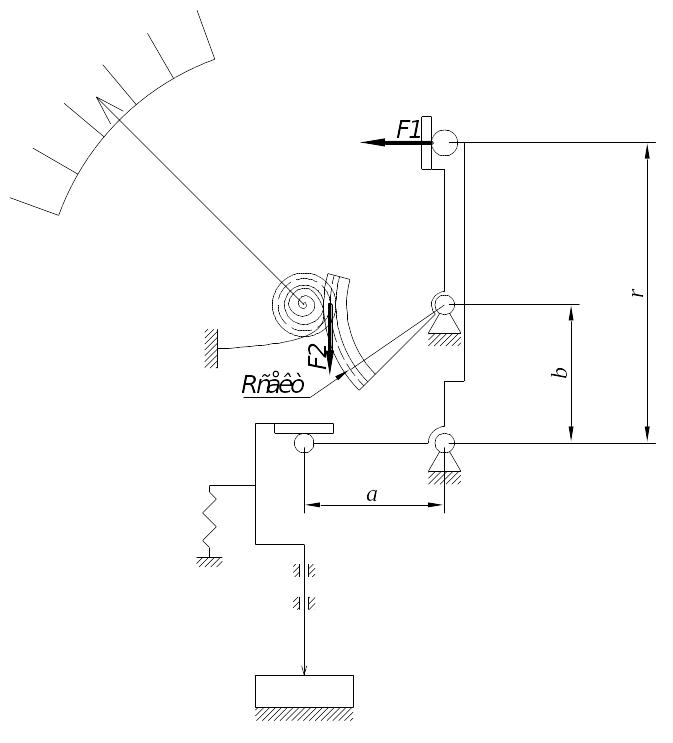
Приведем оба момента к выходу схемы, аналогично преобразованию угловых скоростей в курсе теоретической механики (см. Рис.I-17). Преобразуем суммарный момент дисбаланса в силу F1, действующую в точке контакта кулисы и рычага:
![]()
Момент дисбаланса, приведенный к оси сектора:
![]()
Сила, возникающая в месте зацепления зубчатой пары от дисбаланса:
Момент, приведенный к оси триба:

|
Рис.I-17 – прилагаемые силы при приведении момента к выходу |