Основные определения для передаточных механизмов
При проектировании механизмов приборов применяют следующие виды деталей:
Схемные детали и устройства преобразования в соответствии с принципиальной схемой прибора.
Опоры – детали, удерживающие схемные детали.
Кронштейны, плиты.
Корпусы – детали, несущие защитные и декоративные функции.
Крепежные детали – детали, предназначенные для соединения различных деталей механизмов.
Назначение передаточных механизмов
Преобразование и передача движения к исполнительному органу.
Преобразование измерительных характеристик механического сигнала, перемещение, воздействующее на электрические, электронные или иные преобразователи.
Выполнение математических операций.
Выполнение вспомогательных операций (дистанционное управление).
Требования к конструкции передаточных механизмов
Повышенная точность преобразования движения по известной функциональной зависимости.
Достаточная прочность и жесткость элементов механизмов при передаче усилий и моментов.
Простота и надежность регулировки.
Высокий КПД.
Малая чувствительность к температурным измерениям и вибрациям.
Технологичность конструкции: минимальные габаритные размеры, минимальная стоимость изготовления.
Отличительные особенности передаточных механизмов приборов
Малые передаваемые нагрузки.
Ограниченные диапазоны скоростей.
Ограниченные диапазоны преобразования движений.
Неполные циклы работы механизмов.
Повышенные требования к точности преобразования движения.
Структурная и принципиальная кинематическая схема передаточных механизмов
При решении задачи изображения схемы работы механизмов, обычно применяют два способа: структурная схема и принципиальная схема.
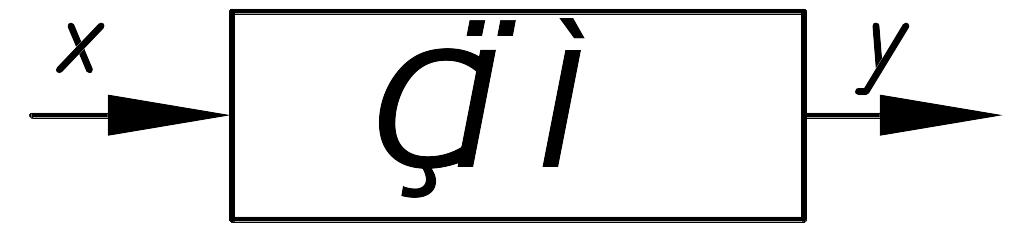
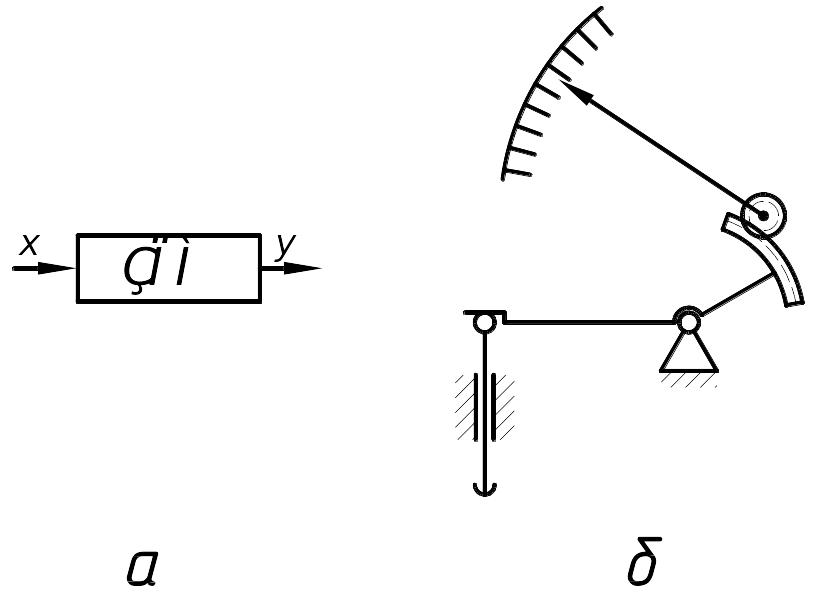
Как видно из названия, основной задачей структурной схемы является изображение только структуры некоторого механизма как последовательности соединенных между собой звеньев. Структурная схема представляет собой блок-схему, каждый блок которой является кинематической парой (Рис.I-5а).
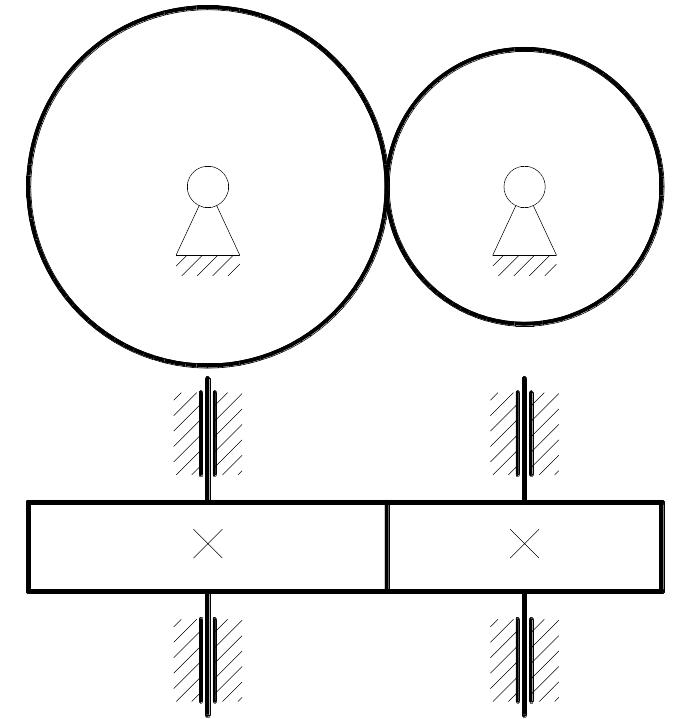
Принципиальная схема, в отличие от структурной, дает представление не только о последовательности соединения звеньев, но и о расположении звеньев в пространстве. Таким образом, появляется возможность судить о габаритных размерах всего механизма и произвести оценку оптимальности расположения составных частей механизма. На принципиальной схеме условно изображают кинематические звенья и элементы, направляющие поступательного и вращательного движения (перемещения), пружины и упругие элементы, обеспечивающие силовое замыкание механизмов. Пример плоской (двухмерной) принципиальной схемы приведен на Рис.I-5б.
|
Рис.I-5 – пример структурной (а) и принципиальной (б) схем |
Примеры обозначения некоторых кинематических пар в структурных и принципиальных схемах приведены в таблице 1.
Таблица 1 – примеры обозначения некоторых кинематических пар |
||
Наименование пары |
Обозначение в структурной схеме |
Обозначение в принципиальной схеме |
Зубчатый передаточный механизм (ЗПМ) |
|
|
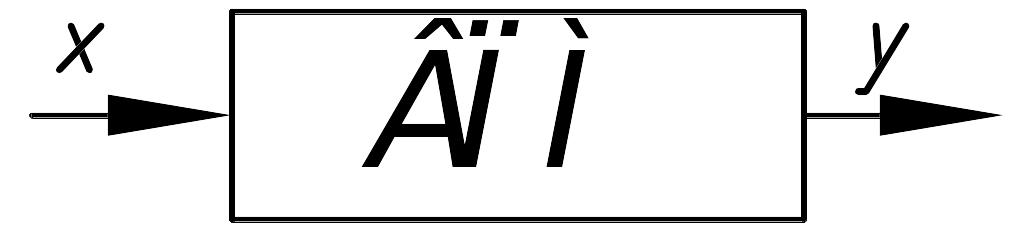
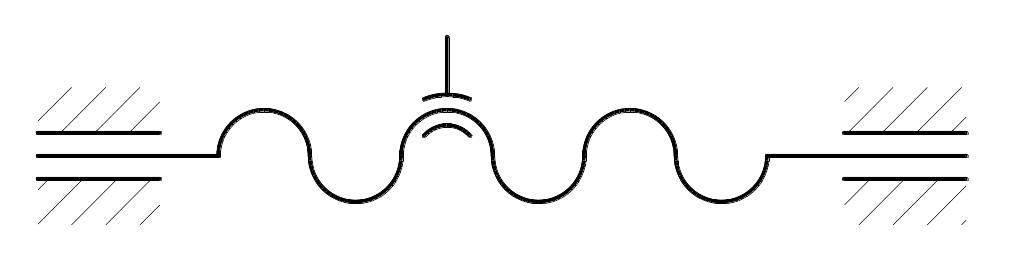
Винтовой передаточный механизм (ВПМ) |
|
|
Кулачковый передаточный механизм (КПМ) |
|
|