

4. Типовые звенья и их передаточные функции. Интегрирующее звено. Ду, передаточная и переходная характеристики.
Дифференциальное уравнение интегрирующего звена имеет вид:
![]() (2.10)
(2.10)
Коэффициент
называется коэффициентом усиления
интегрирующего звена. При нулевых
начальных условиях (т.е если при
![]() имеем
имеем
![]() )
у интегрирующего звена выходная величина
пропорциональна интегралу входной
величины:
)
у интегрирующего звена выходная величина
пропорциональна интегралу входной
величины:
![]()
Записываем дифференциальное уравнение
звена (2.10) в алгебраической операторной
форме, получим:![]() ,откуда
находим передаточную функцию
звена:
,откуда
находим передаточную функцию
звена: ![]() (2.11)
(2.11)
Дифференциальное уравнение интегрирующего
звена можно записать в другой форме:
![]() ,
где
,
где
![]() .
.
При этом передаточная функция звена
примет вид:
![]() (2.12)
(2.12)
На рис. 2.4 представлен характер изменения выходной величины интегрирующего звена
 из
уравнения (2.11) получим
из
уравнения (2.11) получим
![]() как реакцию звена (цепи) на единичное
входное воздействие, выраженную в
алгебраической форме. Запишем данное
равенство в форме оригинала функции,
выполнив обратное преобразование
Лапласа:
как реакцию звена (цепи) на единичное
входное воздействие, выраженную в
алгебраической форме. Запишем данное
равенство в форме оригинала функции,
выполнив обратное преобразование
Лапласа:
![]() ,
(2.13)
,
(2.13)
если входное воздействие является
единичным, т.е.
![]() соответствует
соответствует
![]() ,
тогда преобразование можно записать:
,
тогда преобразование можно записать:![]() .Часто
в качестве такого звена используется
операционный усилитель в режиме
интегрирования. Интегрирующим звеном
является также обычный гидравлический
демпфер или интегрирующий привод.
.Часто
в качестве такого звена используется
операционный усилитель в режиме
интегрирования. Интегрирующим звеном
является также обычный гидравлический
демпфер или интегрирующий привод.
Интегрирующее звено с замедлением
Звено описывается дифференциальным
уравнением ![]() (2.15)
(2.15)
Передаточная функция звена ![]() (2.16)
(2.16)
Примером такого звена является двигатель,
если в качестве выходной величины
рассматривать не угловую скорость, а
угол поворота, являющийся интегралом
от угловой скорости. Интегрирующее
звено с замедлением можно представить
как совокупность двух включенных
последовательно звеньев – идеального
интегрирующего и апериодическое первого
порядка. Для нахождения временных
характеристик удобно передаточную
функцию представить в виде алгебраической
суммы
![]() ,что
позволяет представить решение
дифференциального уравнения (2.20) в виде
суммы решений для идеального интегрирующего
звена и апериодического звена первого
порядка.
,что
позволяет представить решение
дифференциального уравнения (2.20) в виде
суммы решений для идеального интегрирующего
звена и апериодического звена первого
порядка.
![]() (2.17)
(2.17)
А симптотическая
ЛАХ представляет собой две прямые с
отрицательными наклонами -20 дБ/дек (при
симптотическая
ЛАХ представляет собой две прямые с
отрицательными наклонами -20 дБ/дек (при
![]() )
и -40 дБ/дек (при
)
и -40 дБ/дек (при
![]() ).
).
![]()
![]()
Изодромное звено
Звено записывается уравнением![]() (2.18)
(2.18)
Передаточная функция звена![]() ,
,
г
 де
де
![]() – постоянная времени изодромного звена.
Звено можно представить в виде совокупности
двух звеньев, действующих параллельно,
идеального интегрирующего с коэффициентом
передачи
и безынерционного с коэффициентом
передачи
– постоянная времени изодромного звена.
Звено можно представить в виде совокупности
двух звеньев, действующих параллельно,
идеального интегрирующего с коэффициентом
передачи
и безынерционного с коэффициентом
передачи
![]() .Таким
звеном может быть комбинация пружины
с демпфером. Логарифмическая
амплитудно-частотная характеристика
(ЛАХ) строится по выражнию:
.Таким
звеном может быть комбинация пружины
с демпфером. Логарифмическая
амплитудно-частотная характеристика
(ЛАХ) строится по выражнию:![]() .
.
![]()
![]()
5. Типовые звенья и их передаточные функции. Инерционное звено первого порядка, ду, передаточная и переходная характеристики. Пример реализации.
Инерционному звену первого порядка
соответствует дифференциальное уравнение
![]() (2.25)
(2.25)
В операторной форме:
![]() .
.
Передаточная функция инерционного
звена первого порядка![]() .
(2.26)
.
(2.26)
Дифференциальное уравнение достаточно просто решается обычным методом.
По таблицам преобразования Лапласа находим изображение входной величины:
![]() .
.
Изображение выходной величины равно:![]() ,
,
Выражаем оригинал функции через ее изображение (производим обратное преобразование), вынося постоянную величину за знак преобразования Лапласа:
 .
.
Полагая
![]() ,
по таблицам преобразования Лапласа
находим:
,
по таблицам преобразования Лапласа
находим:
![]() . (2.27)
. (2.27)
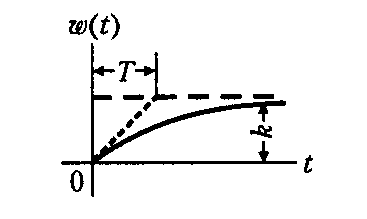
Переходный процесс инерционного звена первого порядка представлен на рис.
К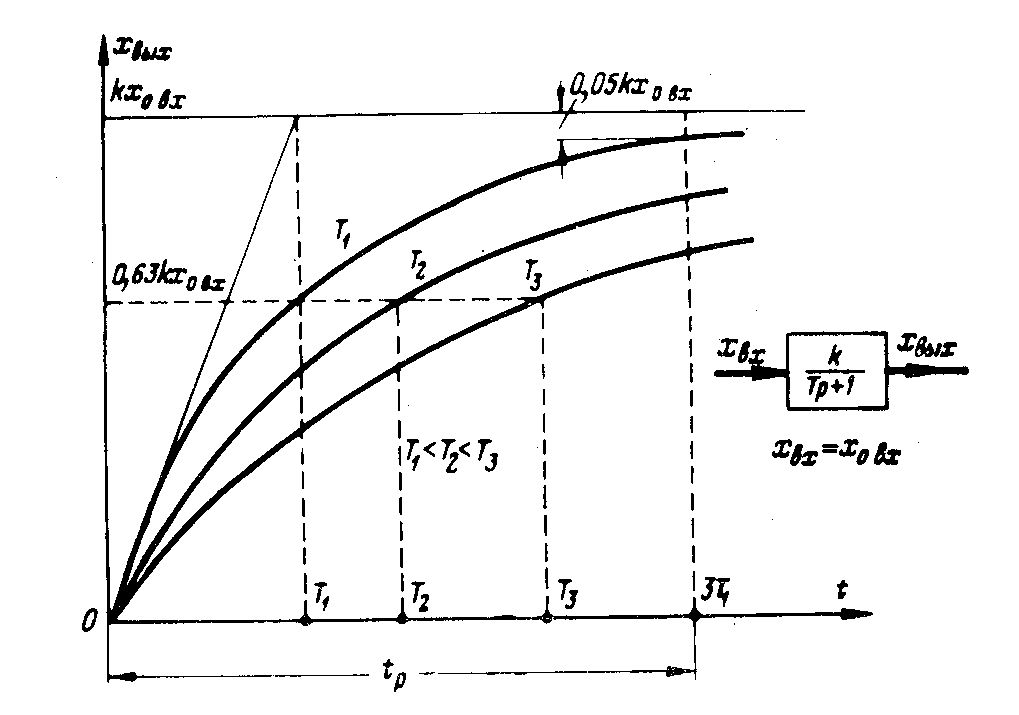 ривые
переходных процессов имеют вид экспонент
ривые
переходных процессов имеют вид экспонент
В качестве первого примера можно рассмотреть двигатель любого типа (электрический, гидравлический, пневматический и т.д.), На рис. 2.11 приведены примеры реализации инерционных звеньев первого порядка как пассивных электрических цепей.
 Входной
величиной этих звеньев является
напряжение
Входной
величиной этих звеньев является
напряжение
![]() ,
а выходной – напряжение
,
а выходной – напряжение
![]() .
.
Согласно второму закону Кирхгофа для электрической цепи (рис. 2.11, а) можно записать:
![]() ,
,
откуда .
.
По первому закону Кирхгофа
 .
.
Подставив значение
![]() в выражение для
в выражение для
![]() ,
получим:
,
получим:![]() .
.
Преобразовав дифференциальное уравнение
по Лапласу, получим следующую алгебраическую
форму:![]() ,
,
откуда находим передаточную функцию звена ,
где
![]() .
.
Таким образом, электрическая цепь, изображенная на рис. 2.11, а, является инерционным звеном первого порядка (апериодическим звеном).
Коэффициент передачи звена регулируется
величинами сопротивлений
![]() и
и
![]() ,
при этом пропорционально коэффициенту
передачи изменяется и постоянная
времени.
,
при этом пропорционально коэффициенту
передачи изменяется и постоянная
времени.
При
![]() получаем электрическую цепь (рис. 2.11,
б), коэффициент передачи, постоянная
времени и передаточная функция которой
в этом случае будут равны:
получаем электрическую цепь (рис. 2.11,
б), коэффициент передачи, постоянная
времени и передаточная функция которой
в этом случае будут равны:![]() .Электрическая
цепь, представленная на рис. 2.11, б,
является апериодическим звеном с
коэффициентом передачи, равным единице.
.Электрическая
цепь, представленная на рис. 2.11, б,
является апериодическим звеном с
коэффициентом передачи, равным единице.