

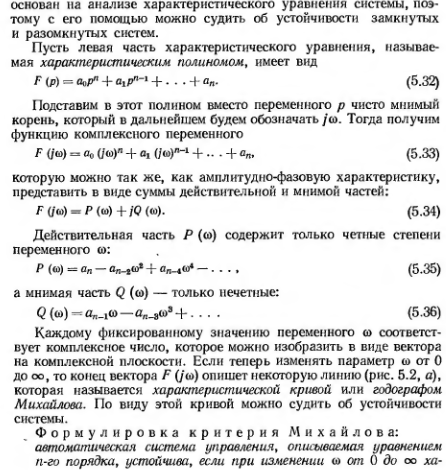
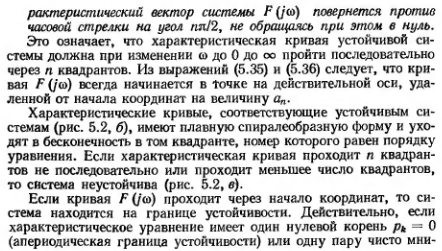
Критерий устойчивости Михайлова – Аня Бершова.
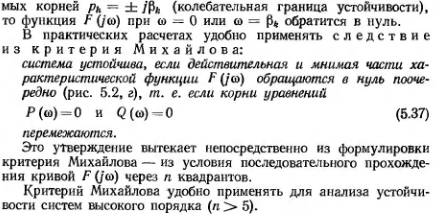
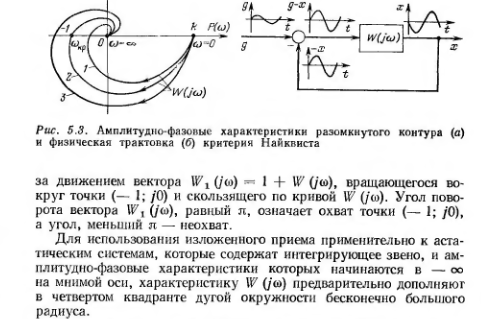
Критерий Найквиста - Аня Бершова.
Позволяет судить о состояние устойчивости системы АФХ разомкнутого контура замкнутой системы

Понятие регулятора сау. П – регулятор – Ира,Антон.
ОПР1.: Регулятор - это элемент, который сравнивает входной сигнал регулятора с заданием (т.е. часть выходного напряжения схемы с опорным напряжением) и вырабатывает, в зависимости от их соотношения, управляющее воздействие. В стабилизаторах напряжения этот элемент принято называть элементом сравнения и усиления (ЭСУ). В качестве регулятора, обычно, используется операционный усилитель.
ОПР2.: В системах автоматического регулирования поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие общее название – автоматические регуляторы.
По виду регулируемого параметра автоматические регуляторы подразделяются на регуляторы температуры, давления, влажности, разряжения, расхода, состава и т. п.
По характеру изменения регулирующего воздействия автоматические регуляторы подразделяются на регуляторы с линейными и нелинейными законами регулирования.
Примером регуляторов с нелинейным законом регулирования могут служить двухпозиционные регуляторы температуры в холодильных машинах. В трехпозиционных дискретных системах выходной сигнал может принимать три значения: –1, 0, +1, т.е. “меньше”, “норма”, больше”. Качество работы таких САР выше, хотя их надежность ниже.
Регуляторы с линейным законом регулирования по математической зависимости между входными и выходными сигналами подразделяются на следующие основные виды: П-, И-, ПИ-, ПИД-регуляторы.
Пропорциональный регулятор (П-регулятор)
В системе регулирования с П-регулятором обычно существует статическая ошибка
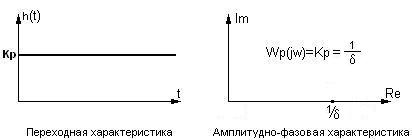
Пропорциональный регулятор (в дальнейшем П-регулятор) представляет собой простейшее усилительное звено. Выходной сигнал П-регулятора ( u(t) ) пропорционален ошибке регулирования ( e(t) ).
u(t)=Kр*e(t), где Kр - коэффициент усиления регулятора
Передаточная функция П-регулятора: Wр(S)=Kр
Переходная характеристика: h(t)=Kр*1(t)
Обычно на практике усилительные свойства П-регулятора характеризуют следующими величинами:
предел пропорциональности d=1/Kр - величина, обратная Kр
предел пропорциональности, выраженный в процентах D=d*100%=100%/Kр
Величина предела пропорциональности показывает на сколько процентов от своего максимального значения должен изменится входной сигнал регулятора, чтобы выходной сигнал изменился на 100%.
Динамические характеристики П-регулятора
В системе регулирования с П-регулятором обычно существует статическая ошибка регулирования (если объект статический).
И – регулятор – Ира, Антон.
И-регулятор - это идеальное интегрирующее звено. Выходной сигнал И-регулятора (u(t)) пропорционален интегралу от ошибки регулирования ( e(t) ).
 ,
где K0 -
коэффициент усиления регулятора
,
где K0 -
коэффициент усиления регулятора
или по другому: du/dt=K0*e(t), т.е. скорость изменения выхода И-регулятора (скорость перемещения регулирующего органа) пропорциональна ошибке регулирования.
Передаточная функция И-регулятора: Wр(S)=K0/S
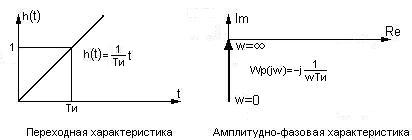
Переходная характеристика: h(t)=K0*t, t³0
Обычно на практике усилительные свойства И-регулятора характеризуют временем изодрома.
время изодрома Ти=1/K0 - величина, обратная K0
Время изодрома показывает за какое время выход регулятора изменится на 100% (регулирующий орган переместится из одного крайнего положения в другое) при скачкообразном изменении входного сигнала на 100%. Таким образом Тихарактеризует быстродействие регулятора.
Динамические характеристики И-регулятора
В системе регулирования с И-регулятором обычно отсутствует статическая ошибка регулирования. Как правило И-регулятор используется не самостоятельно, а в составе ПИ- или ПИД- регуляторов.
ПИ- регулятор– Ира, Антон
Пропорционально-интегральный регулятор (ПИ-регулятор)
ПИ-регулятор - это параллельно соединенные П- и И- регуляторы. Выходной сигнал ПИ-регулятора ( u(t) ) зависит и от ошибки регулирования ( e(t) ), и от интеграла от этой ошибки.
K1 - коэффициент усиления пропорциональной части,
K0 - коэффициент усиления интегральной части
Передаточная функция ПИ-регулятора: Wр(S)=K1+K0/S
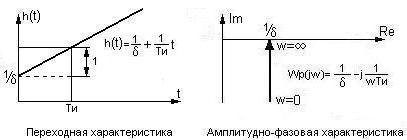
Переходная характеристика: h(t)=K1+K0*t, t³0
Так как ПИ-регулятор можно рассматривать как два регулятора (П- и И-), соединенные параллельно, то усилительные свойства ПИ-регулятора характеризуют два параметра:
1) предел пропорциональности d=1/K1 - величина, обратная K1 (см. П-регулятор)
2) время изодрома Ти=1/K0 - величина, обратная K0 (см. И-регулятор)
Динамические характеристики ПИ-регулятора
В системе регулирования с ПИ-регулятором так же, как и в системе с И-регулятором, отсутствует статическая ошибка, но динамические характеристики лучше.
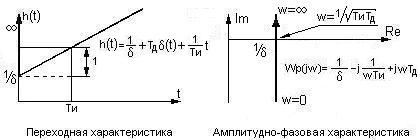
Пропорционально-интегрально-дифференциальный регулятор
ПИД – регулятор– Ира, Антон.
ПИД-регулятор - это параллельно соединенные П-, И- и Д- звенья. Выходной сигнал ПИД-регулятора ( u(t) ) зависит от ошибки регулирования ( e(t) ), от интеграла от этой ошибки и от производной от этой ошибки.

K1 - коэффициент усиления пропорциональной части,
K0 - коэффициент усиления интегральной части
К2 - коэффициент усиления дифференциальной части
Передаточная функция ПИД-регулятора: Wр(S)=K1+K0/S+K2*S
Переходная характеристика: h(t)=K1+K0*t+K2*d(t), где d(t) - дельта-функция, t³0
Усилительные свойства ПИД-регулятора характеризуют три параметра:
1) предел пропорциональности d=1/K1 - величина, обратная K1 (см. П-регулятор)
2) время изодрома Ти=1/K0 - величина, обратная K0 (см. И-регулятор)
3) постоянная времени дифференцирования (время предварения) Тд=K2 (см. ПД-регулятор)
Динамические характеристики ПИД-регулятора
Системы регулирования с ПИД-регуляторами сочетают в себе достоинства П-, И-, и ПД- регуляторов. В таких системах отсутствует статическая ошибка и они обладают высоким быстродействием.