

2.5. Построение графика тягового баланса автомобиля.
График тягового баланса строится на прямой передаче. Для автомобилей с двухвальными коробками на передаче максимальной скорости.
Уравнение тягового баланса:
![]() ;
(2.31)
;
(2.31)
где: Rψ – сопротивление перекатыванию автомобиля;
δВР – коэффициент учета вращающихся масс;
Rj – сопротивление силам инерции поступательно движущихся масс автомобиля;
RW – сопротивление воздуха при движении автомобиля.
Общий вид тягового баланса автомобиля представлен на рисунке.
Дорожные сопротивления можно принять величиной постоянной:
![]() ;
(2.32)
;
(2.32)
где: т – полная масса автомобиля;
![]() ;
(2.24)
;
(2.24)
Сопротивление воздуха определяется по формуле:
![]() ;
(2.33)
;
(2.33)
При этом скоростью до VMAX можно задаваться произвольно.
Кривая касательного усилия на движителях определяется по формуле:
![]() ;
(2.34)
;
(2.34)
Значения МКР принимаются из скоростной характеристики.
Критерием правильности расчетов служит точное совпадение численных значений РК и Rψ+RW в точке «А» (Рисунок 2).
РК
RW
Rψ
VA.MAX
V
PK,
RW,
Rψ,
RjРЕЗ
А
В
В
С
С
Д
Д
R
jРЕЗ=δВР·Rj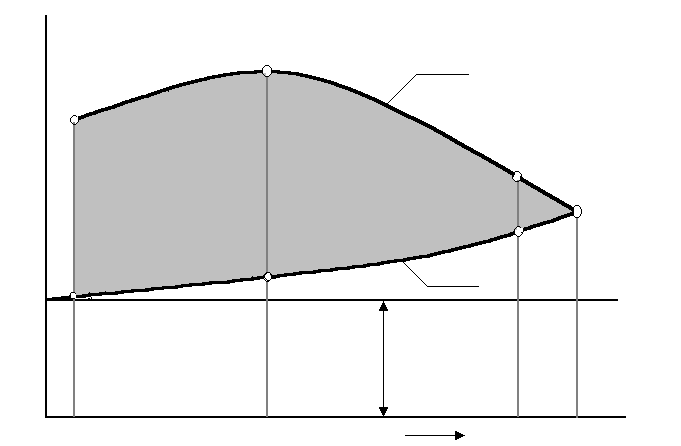

Рисунок 5. График тягового баланса автомобиля.
2.6. Построение универсальной динамической характеристики автомобиля.
Динамической характеристикой автомобиля называют графически выраженную зависимость динамического фактора от скорости движения автомобиля на разных передачах.
Универсальная динамическая характеристика автомобиля является его основным техническим документом.
Динамический фактор представляет собой отношение избыточной касательной силы к силе тяжести автомобиля:
 ;
(2.35)
;
(2.35)
Величина динамического фактора зависит от характера протекания кривой крутящего момента двигателя, передаточного числа трансмиссии, скорости движения автомобиля и его массы.
Вначале строят динамическую характеристику порожнего автомобиля без груза и без прицепа.
Масса порожнего автомобиля определяется следующим образом:
![]() ;
(2.36)
;
(2.36)
где: тВОД – масса водителя.
Для построения кривых динамического фактора по передачам в уравнение (2.27) вместо т подставляется тПОР.
Общий вид динамической характеристики представлен на рисунке 8.
Задаются рядом значений частот вращения коленчатого вала (20, 40, 60, 80,100, 120 от пМАХ), и для выбранных частот подсчитывают величины скоростей автомобиля на каждой передаче по формуле:
![]() ;
км/ч
(2.37)
;
км/ч
(2.37)
Величина динамического фактора определяется по формуле (2.37).
Полученные данные заносят в таблицу .
Таблица 7. Расчетные значения динамической характеристики автомобиля.
Передача |
V, км/ч |
п, мин-1 |
МКР, Нм |
РК, Н |
RW, Н |
D |
|
|
|
|
|
|
|
После построения динамической характеристики порожнего автомобиля производят дополнительные построения для получения универсальной динамической характеристики.
V
VMAX
I
II
III
IV
0,03
0,09
0,15
0,21
0,27
0,045
0,135
0,225
D
Г
1,0
1,125
1,25
1,375
1,5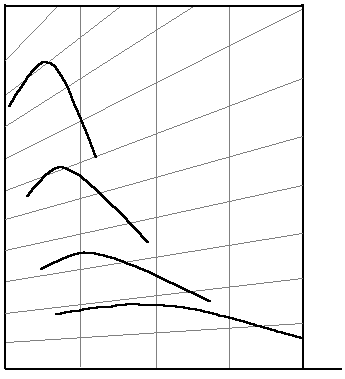
Рисунок 6. Универсальная динамическая характеристика автомобиля.
В верхней части построенной динамической характеристики (рисунок 6) строится вторая горизонтальная координатная ось и на ней откладываются значения коэффициента загрузки автомобиля:
![]() ;
(2.38)
;
(2.38)
Начало отсчета по оси Г начинается с 1, что соответствует массе порожнего автомобиля. Отношение полностью груженого автомобиля к порожнему даст максимальное значение Г , и его нужно отложить в точке координаты, соответствующей VMAX . Точки ГМАХ и VMAX соединяются вертикальной линией, которая будет служить ординатой динамического фактора полностью груженого автомобиля.
Умножив значения динамического фактора порожнего автомобиля на ГМАХ , получают численные значения динамического фактора полностью груженого автомобиля и откладывают их на второй ординате:
![]() ;
(2.39)
;
(2.39)
Соединяют соответствующие значения динамического фактора порожнего и полностью груженого автомобиля наклонными линиями. Ось Г разбивают на ряд равных отрезков и через их граничные точки проводят вертикальные линии до пересечения с нижней горизонтальной осью. Эти линии будут соответствовать промежуточным значениям Г.
Таким образом, построенная универсальная динамическая характеристика позволяет определять значение динамического фактора при любой степени загрузки кузова.