

54. Замкнутые электроприводы с подчиненным регулированием координат..
Замкнутые электроприводы с подчиненным регулированием координат. Эффективное и качественное регулирование координат в системе П - Д обеспечивает принцип подчиненного регулирования, реализуемый по структурной схеме, приведенной на рис. 11.4. Напомним, что этот принцип предусматривает регулирование каждой координаты с помощью своего отдельного регулятора и соответствующей обратной связи, т. е. регулирование каждой координаты происходит в собственном замкнутом контуре и требуемые характеристики ЭП в статике и динамике можно получить за счет выбора схемы и параметров регулятора этой координаты и цепи ее обратной связи.
У правление
внутренним контуром с помощью выходного
сигнала внешнего контура определяет
еще одно ценное свойство таких
систем. Оно заключается в возможности
простыми средствами ограничивать любую
регулируемую координату, например ток
и момент, на заданном уровне. Для этого
требуется всего лишь ограничить
сигнал, поступающий с внешнего контура.
правление
внутренним контуром с помощью выходного
сигнала внешнего контура определяет
еще одно ценное свойство таких
систем. Оно заключается в возможности
простыми средствами ограничивать любую
регулируемую координату, например ток
и момент, на заданном уровне. Для этого
требуется всего лишь ограничить
сигнал, поступающий с внешнего контура.
Рассмотрим схему ЭП (рис. 11.26, а) с подчиненным регулированием, выходной регулируемой координатой которой является скорость. Управляющая часть схемы состоит из двух замкнутых контуров: контура регулирования тока (момента), содержащего регулятор тока РТ и датчик тока ДТ, и контура регулирования скорости, содержащего регулятор скорости PC и датчик скорости (тахогенератор) ТГ.
Р егуляторы
тока и скорости в большинстве схем ЭП
этого типа выполняются на базе
операционных усилителей. Включение в
цепь задающего сигнала скорости U3C
регулятора
скорости PC
и
его обратной связи резисторов R1
и
Rос1
обеспечивает
изменение (усиление или ослабление)
этого сигнала с коэффициентом k1=Rос1/
R1
Аналогично
изменение сигнала обратной связи по
скорости Uос
. происходит
с коэффициентом k2-
Roс1/R2.
Такой
регулятор получиг. название
пропорционального регулятора скорости.
егуляторы
тока и скорости в большинстве схем ЭП
этого типа выполняются на базе
операционных усилителей. Включение в
цепь задающего сигнала скорости U3C
регулятора
скорости PC
и
его обратной связи резисторов R1
и
Rос1
обеспечивает
изменение (усиление или ослабление)
этого сигнала с коэффициентом k1=Rос1/
R1
Аналогично
изменение сигнала обратной связи по
скорости Uос
. происходит
с коэффициентом k2-
Roс1/R2.
Такой
регулятор получиг. название
пропорционального регулятора скорости.
П ри
включении в цепь ОУ конденсаторов
(реактивных электрических элементов)
его функциональные возможности по
преобразованию электрических
сигналов становятся шире. Так, включение
в цепь обратной связи регулятора тока
РТ
конденсатора
Сос
после-
ри
включении в цепь ОУ конденсаторов
(реактивных электрических элементов)
его функциональные возможности по
преобразованию электрических
сигналов становятся шире. Так, включение
в цепь обратной связи регулятора тока
РТ
конденсатора
Сос
после-
Будем считать что у крали сёдня разгрузочный день=)
д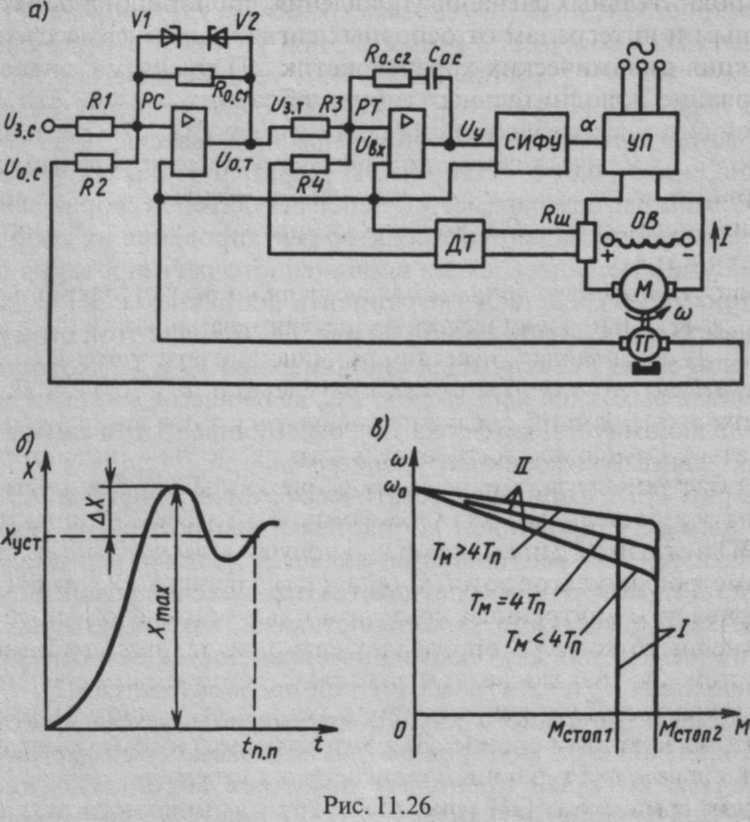 овательно
с резистором Roc2
позволяет
получить на выходе РТсигнал
в виде суммы двух составляющих:
овательно
с резистором Roc2
позволяет
получить на выходе РТсигнал
в виде суммы двух составляющих:
Uy = k3Uвх+k4∫Uвхdt,
где k3 k4 - коэффициенты усиления сигналов.
Здесь сигнал Uу содержит пропорциональную и интегральную составляющие входного сигнала Uвх т.е. РТ является в этом случае пропорционально-интегральным (П - И) регулятором.
По каким же критериям и условиям выбираются схема и параметры цепей того или иного регулятора? Основным условием здесь является желаемый (заданный) характер переходных процессов при регулировании координат. Из всех возможных их видов обычно выбираются переходные процессы с затухающими колебаниями (см. рис. 11.26, б), что является оптимальным в том смысле, что позволяет обеспечить устойчивость этих процессов при небольших длительностях и перерегулированиях