

48. Регулирование координат ад с помощью резисторов
Данный способ регулирования координат, называемый часто реостатным, осуществлятся введением добавочных активных резисторов в статорные или роторные цепи АД (см. рис. 5.1). Он привлекателен простотой своей реализации, но имеет в то же время невысокие показатели качества регулирования и экономичности.
В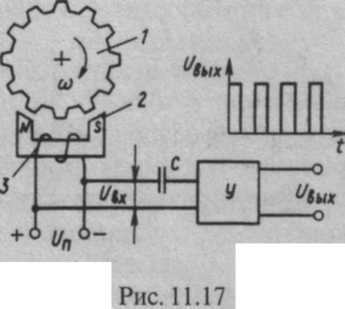 ключение
добавочных резисторов в цепь статора
применяется главным образом для
регулирования (ограничения) в переходных
процессах тока и момента АД с
короткозамкнутым ротором. все
искусственные электромеханические
характеристики располагаются в первом
квадранте ниже и левее естественной.
С учетом того, что скорость идеального
холостого хода ю0
при включении R]a
не
изменяется, получаемые искусственные
электромеханические характеристики
можно представить семейством кривых
2...
4, которые
расположены ниже естественной
характеристики 1,
построенной
при Л1д
= 0, причем большему значению Rla
соответствует
больший наклон искусственных
характеристик (рис. 5.6, а).
Практическая
ценность этих характеристик состоит
в обеспечении возможности ограничения
токов АД при пуске.
ключение
добавочных резисторов в цепь статора
применяется главным образом для
регулирования (ограничения) в переходных
процессах тока и момента АД с
короткозамкнутым ротором. все
искусственные электромеханические
характеристики располагаются в первом
квадранте ниже и левее естественной.
С учетом того, что скорость идеального
холостого хода ю0
при включении R]a
не
изменяется, получаемые искусственные
электромеханические характеристики
можно представить семейством кривых
2...
4, которые
расположены ниже естественной
характеристики 1,
построенной
при Л1д
= 0, причем большему значению Rla
соответствует
больший наклон искусственных
характеристик (рис. 5.6, а).
Практическая
ценность этих характеристик состоит
в обеспечении возможности ограничения
токов АД при пуске.
Д
 ля
получения искусственных механических
характеристик проанализируем влияние
ля
получения искусственных механических
характеристик проанализируем влияние
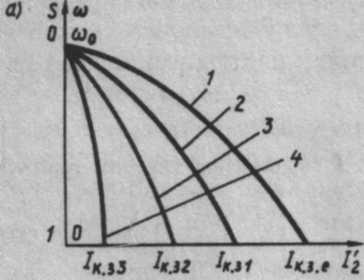
Скорость холостого хода со0= Infjp не изменяется при Rla = var, т.е. все искусственные характеристики проходят через эту точку на оси скорости (скольжения).
Включение добавочных резисторов R2д в цепь ротора применяется как с целью регулирования тока и момента АД с фазным ротором, так и для регулирования его скорости.
Искусственные электромеханические характеристики при - var имеют вид, показанный на рис. 5.6, а, и могут использоваться для регулирования (ограничения) пускового тока.
49. Датчики скорости и положения, применяющиеся в замкнуты схемах управления.
Для получения информации о скорости и положении вала двигателя в замкнутых ЭП применяются аналоговые и дискретные датчики скорости и положения.
Датчики скорости (тахогенераторы) предназначены для измерени скорости вращения вала двигателя или исполнительного органа рабочей машины. Они представляют собой специализированные электрические машины небольшой мощности, выходное напряжение кс -торых пропорционально скорости вращения их якоря (ротора), т. е £/вых - уы, где у - коэффициент пропорциональности. Основное тре-бование к тахогенераторам заключается в максимальном приближении зависимости U (м) к линейной, чт:
вых 4 ' 7
определяет точность их работы.
По принципу своего действия и устройству тахогенераторы бывают пост янного и переменного тока.
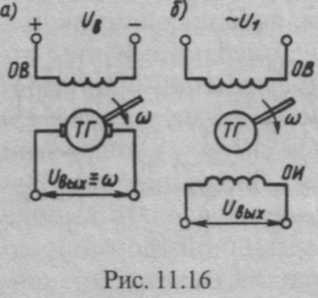
Т ахогенераторы
постоянного ток. представляют
собой небольшие генератс -ры постоянного
тока с возбуждением с~ независимого
источника (рис. 11.16, а)
иг. от
постоянного магнита (см. рис. 10.7.
Б)
Тахогенераторы переменного тока в
основном применяются асинхронного
типа и по своему устройству мало
отличаются от однофазных асинхронных
двигателей. Они имеют две обмотки (см.
рис. 11.16,5), одна из которых ОВ
подключается
к питающей сети и служит для возбуждения
тахогенератора, а другая ОИ
является
измерительной. Напряжение на зажимах
этой обмотки U
пропорционально
скорости вращения тахогенератора ш.
ахогенераторы
постоянного ток. представляют
собой небольшие генератс -ры постоянного
тока с возбуждением с~ независимого
источника (рис. 11.16, а)
иг. от
постоянного магнита (см. рис. 10.7.
Б)
Тахогенераторы переменного тока в
основном применяются асинхронного
типа и по своему устройству мало
отличаются от однофазных асинхронных
двигателей. Они имеют две обмотки (см.
рис. 11.16,5), одна из которых ОВ
подключается
к питающей сети и служит для возбуждения
тахогенератора, а другая ОИ
является
измерительной. Напряжение на зажимах
этой обмотки U
пропорционально
скорости вращения тахогенератора ш.
Синхронные тахогенераторы представляют собой однофазный синхронный генератор малой мощности с ротором в виде многополюсного постоянного магнита. При вращении ротора создаваемое им магнитное поле пересекает витки обмотки статора и наводит в ней ЭДС, пропорциональную скорости вращения, поэтому выходное напряжение на зажимах обмотки статора оказывается пропорциональным скорости ротора.
Особенностью синхронных тахогенераторов является зависимость частоты их выходного напряжения от скорости ротора.
И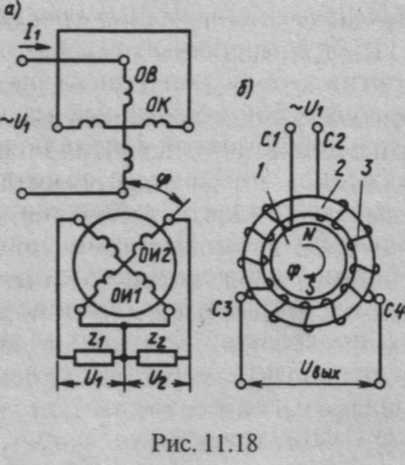 мпульсный
индукционный датчик скорости включает
в себя зубчатый диск 1
(рис.
11.17), соединенный с валом двигателя или
рабочей машины. Напротив зубцов
этого диска располагается индуктор
2,
представляющий
собой постоянный магнит с расположенной
на нем измерительной обмоткой 3,
подключенной
к источнику питания Un.
Напряжение,
снимаемое с обмотки, подается через
конденсатор С
на
вход усилителя У, выполняющего
одновременно роль формирователя
импульсов. При вращении диска изменяется
зазор между его зубцами и полюсами
индуктора 2.
Вследствие
этого резко изменяются магнитное
сопротивление воздушного зазора и
магнитный поток, проходящий через зубцы
диска 7 и индуктор. Изменяющийся магнитный
поток индуцирует в обмотке 3
ЭДС,
частота которой / =
G)jV/(27i),
где
N
-
число зубцов диска; со - скорость
диска (вала двигателя).
мпульсный
индукционный датчик скорости включает
в себя зубчатый диск 1
(рис.
11.17), соединенный с валом двигателя или
рабочей машины. Напротив зубцов
этого диска располагается индуктор
2,
представляющий
собой постоянный магнит с расположенной
на нем измерительной обмоткой 3,
подключенной
к источнику питания Un.
Напряжение,
снимаемое с обмотки, подается через
конденсатор С
на
вход усилителя У, выполняющего
одновременно роль формирователя
импульсов. При вращении диска изменяется
зазор между его зубцами и полюсами
индуктора 2.
Вследствие
этого резко изменяются магнитное
сопротивление воздушного зазора и
магнитный поток, проходящий через зубцы
диска 7 и индуктор. Изменяющийся магнитный
поток индуцирует в обмотке 3
ЭДС,
частота которой / =
G)jV/(27i),
где
N
-
число зубцов диска; со - скорость
диска (вала двигателя).
Созданное этой ЭДС напряжение переменного тока Um через конденсатор С подается на вход усилителя, который, усиливая этот сигнал, формирует из него последовательность выходных прямоугольных импульсов, частота которых пропорциональна измеряемой скорости. Далее эти импульсы при помощи цифрового блока «частота - код», имеющегося, например, в УБСР-ДИ, преобразуются в двоичное число посредством их подсчета за определенный интервал времени с запоминанием полученного числа на время последующего интервала. При необходимости этот переменный по частоте сигнал можно преобразовать и в напряжение постоянного тока (например, с помощью интегрирующего операционного усилителя) для использования в аналоговых схемах управления ЭП.
Датчики положения применяются в замкнутых схемах управления ЭП и выполняются аналоговыми или цифровыми.
Вращающиеся (поворотные) трансформаторы, являющиеся аналоговыми датчиками положения (угла поворота) вала двигателя или рабочей машины, представляют собой индукционную электрическую машину малой мощности. Их работу рассмотрим на примере наиболее распространенного синусно-косинусного вращающегося трансформатора (СКВТ). Этот трансформатор (рис. 11.18, а) имеет четыре обмотки, две из которых (возбуждения ОВ и компенсационная О К) расположены на статоре и две (измерительные ОИ1 и ОИ2), называемые вторичными, - на роторе. Ротор соединяется с валом двигателя или рабочей
![]()