

47.Аналоговые элементы и устройства управления эп
Работу таких элементов и устройств рассмотрим на примере систем УБСР.
Операционный усилитель (ОУ) является основным элементом аналоговой системы. Он представляет собой усилитель постоянного тока с очень большим коэффициентом усиления (до 10 000), охваченный отрицательной обратной связью.
При включении во входные цепи и цепи обратных связей наряду с резисторами конденсаторов ОУ могут осуществлять и другие весьма разнообразные преобразования входных сигналов, необходимые для получения требуемых управляющих воздействий е ЭП. Такие схемы получили название регуляторов. В табл. 11.1 приведены некоторые распространенные схемы регуляторов с использованием ОУ.
Р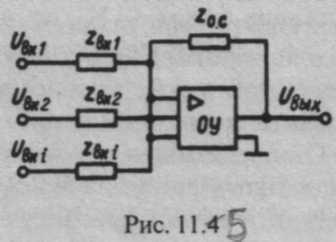 егуляторы
получили свои названия в зависимости
от выполня емых ими функциональных
преобразований входных сигналов.
егуляторы
получили свои названия в зависимости
от выполня емых ими функциональных
преобразований входных сигналов.
Пропорциональный (П) регулятор осуществляет рассмотренное выше масштабное (пропорциональное) преобразование входного сигнала с коэффициентом к = R0J Rt и инвертированием его знака.
Интегральный (И) регулятор. Для реализации этого регулятора в цепь обратной связи ОУ включается конденсатор Со , а во входную цепь - резистор Rv В результате регулятор приобретает свойства интегрирующего устройства и напряжение на его выходе определяется интегралом от входного сигнала.
Дифференциальный (Д) регулятор. Схема соединения этого регулятора обеспечивает дифференцирование входного сигнала с коэффициентом Т = R0CC{.).
Апериодический (А) регулятор. Переходной функцией такого регулятора является экспоненциальная зависимость выходного сигнала во времени.
Функциональные преобразователи входят в состав УБСР-АИ и позволяют возводить в квадрат и извлекать квадратный корень из входного сигнала (ячейка ПК-1АИ), умножать и делить входные аналоговые сигналы (ячейки УМ-1АИ, УМ-2АИ, МДУ-1АИ), выделять модуль сигнала (ячейка ВМ-1АИ), осуществлять различные нелинейные зависимости между входным и выходным сигналами (ячейка ПФ-1АИ).
Командные (задающие) устройства реализуются на базе сельсин-ного командоаппарата типа СКА. Они выпускаются в трех исполнениях - с приводом от рукоятки (СКАР), педальным приводом (СКАП) и маховичковым приводом (СКАЗ).
Датчики координат электрических приводов. В замкнутых ЭП, как уже говорилось, для формирования требуемых статических и динамических характеристик применяются обратные связи по скорости, положению, току и напряжению, реализуемые с помощью соответствующих датчиков.
Датчики напряжения для ЭП с ДПТ выполняются на основе потенциометра, включаемого на зажимы якоря М двигателя, как это показано на рис. 11.10, а. Уровень сигнала обратной связи по напряжению Uo н, снимаемого с потенциометра RP, а значит, и коэффициент обратной связи по напряжению определяются положением движка потенциометра.
Датчики положения применяются для получения электрического сигнала, пропорционального положению исполнительного органа или вала двигателя. В таких датчиках используются сельсины, потенциометры и вращающиеся трансформаторы.