

Экзамен / тмм - экзамен(и задачи) / ТММ Экзамен! / Лекции / шпоры динамика / 6
.docТрение в кинематических парах
В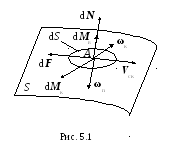 кинематических парах реальных механизмов
возникают силы трения; во многих случаях
эти силы существенно влияют на движения
механизма и должны учитываться в силовых
расчетах.
кинематических парах реальных механизмов
возникают силы трения; во многих случаях
эти силы существенно влияют на движения
механизма и должны учитываться в силовых
расчетах.
Пусть
S – поверхность
соприкосновения элементов кинематической
пары (рис.5.1). Выделим на этой поверхности
элементарную площадку dS
в окрестности некоторой точки A.
Рассмотрим силы взаимодействия,
возникающие на этой площадке и приложенные
к одному из звеньев кинематической
пары. Главный вектор этих сил разложим
на составляющие:
![]() ,
направленную по нормали к поверхности
S, и
,
направленную по нормали к поверхности
S, и
![]() ,
лежащую в касательной плоскости. Главный
момент относительно точки A
также разложим на нормальную
,
лежащую в касательной плоскости. Главный
момент относительно точки A
также разложим на нормальную
![]() и касательную
и касательную
![]() составляющие. Сила
составляющие. Сила
![]() называется силой
трения скольжения;
момент
называется силой
трения скольжения;
момент
![]() – моментом
трения качения, а момент
– моментом
трения качения, а момент
![]() – моментом
трения верчения. По
своей физической природе силы трения
являются силами сопротивления движению;
отсюда следует, что сила
– моментом
трения верчения. По
своей физической природе силы трения
являются силами сопротивления движению;
отсюда следует, что сила
![]() направлена противоположно вектору
относительной скорости
направлена противоположно вектору
относительной скорости
![]() (скорости скольжения)
в точке A, а векторы
(скорости скольжения)
в точке A, а векторы
![]() и
и
![]() – противоположны по направлению
соответственно касательной
– противоположны по направлению
соответственно касательной
![]() и нормальной
и нормальной
![]() составляющим вектора относительной
угловой скорости.
составляющим вектора относительной
угловой скорости.
Многочисленные экспериментальные исследования показали, что при силовом анализе механизмов можно в большинстве случаев основываться на законе сухого трения, известным в физике под названием закона Амонтона – Кулона. В соответствии с этим законом модули силы трения dF и моментов dMК и dMВ принимаются пропорциональными модулю нормальной составляющей реакции dN:
![]()
![]()
![]() (5.1)
(5.1)
где f – безразмерный коэффициент трения скольжения, а k и kВ – коэффициенты трения качения и верчения, измеряемые в сантиметрах.
Из (5.1) и сделанных выше предположений о направлении сил и моментов вытекают следующие векторные соотношения:
 (5.2)
(5.2)
Формулы (5.1) и (5.2) могут быть непосредственно использованы для определения сил трения в высшей кинематической паре с точечным контактом. В случае низших кинематический пар с контактом по линии главный вектор и главный момент сил трения определяется интегрированием сил и моментов, возникающих на элементарных площадках по поверхности или по линии соприкосновения. Так, например, суммарная сила трения в низшей кинематической паре может быть определена по формуле
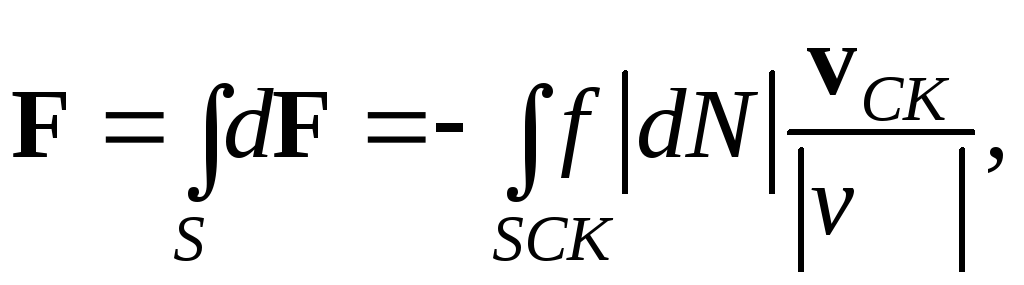 (5.3)
(5.3)
где S – поверхность соприкосновения. Для того чтобы воспользоваться этой формулой, нужно знать закон распределения нормальных реакций по поверхности S.
Коэффициенты трения скольжения, верчения и качения определяются экспериментально; они зависят от многих факторов: от свойств материала, из которого изготовлены соприкасающиеся элементы кинематических пар, от чистоты обработки поверхностей, от наличия смазки и свойств смазочного материала, наконец, от величины относительной скорости и относительной угловой скорости звеньев. В механике машин значения этих коэффициентов предполагаются заданными и постоянными.
Формулы (5.1) и (5.2) становятся неприменимыми, если скорость скольжения в точке контакта и относительная угловая скорость равны нулю, то есть если звенья, образующие кинематическую пару, находятся в состоянии относительного покоя. В этом случае суммарные силы и моменты сил трения в кинематической паре могут быть определены из условий равновесия звеньев; они оказываются при этом зависящими не от нормальных реакций, а непосредственно от приложенных внешних сил.
П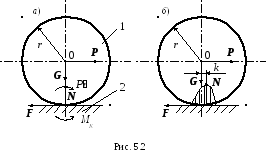 оясним
сказанное примером. На рис.5.2, а
изображена кинематическая пара,
образованная цилиндром 1
и плоскостью 2.
Сила тяжести цилиндра G
уравновешивается нормальной реакцией
N, являющейся
равнодействующей элементарных нормальных
сил, возникающих в точках контакта,
лежащих на образующей цилиндра. Приложив
к оси цилиндра горизонтальную внешнюю
силу P, мы обнаружим,
что при достаточно малой величине этой
силы цилиндр останется в состоянии
покоя. Это означает, что сила P
уравновешивается горизонтальной
составляющей реакции F,
а момент Pּr
– моментом MК,
вектор которого направлен по образующей
цилиндра. Таким образом
оясним
сказанное примером. На рис.5.2, а
изображена кинематическая пара,
образованная цилиндром 1
и плоскостью 2.
Сила тяжести цилиндра G
уравновешивается нормальной реакцией
N, являющейся
равнодействующей элементарных нормальных
сил, возникающих в точках контакта,
лежащих на образующей цилиндра. Приложив
к оси цилиндра горизонтальную внешнюю
силу P, мы обнаружим,
что при достаточно малой величине этой
силы цилиндр останется в состоянии
покоя. Это означает, что сила P
уравновешивается горизонтальной
составляющей реакции F,
а момент Pּr
– моментом MК,
вектор которого направлен по образующей
цилиндра. Таким образом
F = P, MК = Pּr . (5.4)
Сила F и момент MК могут возникнуть только за счет сил трения, величина которых, как это видно из формулы (5.4), определяется только величиной силы P и не зависят от N. Однако, увеличивая силу P, мы обнаружим, что при некотором ее значении состояние покоя будет нарушено. Если сила P достигнет такой величины, при которой нарушится условие
![]() (5.5)
(5.5)
где k – коэффициент трения качения, то начнется качение цилиндра по плоскости без скольжения. Скольжение начинается при нарушении условия
![]() , (5.6)
, (5.6)
где fn – коэффициент трения покоя, обычно несколько превышающий величину коэффициента трения скольжения f. Если k/r<fn, то сначала (при увеличении P) начнется качение, а скольжение произойдет при большем значении P; при k/r> fn будет наблюдаться обратная картина.
Отметим попутно, что возникновение момента MK связано с деформацией цилиндра и плоскости в зоне контакта (см. рис.5.2, б) и появлением несимметрии в распределении нормальных сил, которая вызывает смещение их равнодействующей N в направлении вектора силы P.
5.2. Модели кинематических пар с трением
В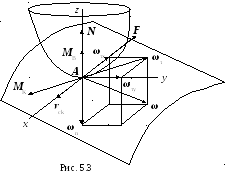 ведение
сил трения приводит к увеличению числа
неизвестных компонент реакций
кинематической пары, а количество
уравнений кинетостатики при этом не
возрастает. Для того, чтобы задача
силового анализа осталась разрешимой,
необходимо ввести дополнительные
условия, количество которых равно числу
неизвестных. Проще всего такие условия
вводятся для высшей кинематической
пары первого класса (рис.5.3). Пусть
поверхности элементов пары деформируются
под действием нормальной силы и касаются
в малой окрестности точки А,
а относительное движение звеньев
определяется заданием скорости скольжения
ведение
сил трения приводит к увеличению числа
неизвестных компонент реакций
кинематической пары, а количество
уравнений кинетостатики при этом не
возрастает. Для того, чтобы задача
силового анализа осталась разрешимой,
необходимо ввести дополнительные
условия, количество которых равно числу
неизвестных. Проще всего такие условия
вводятся для высшей кинематической
пары первого класса (рис.5.3). Пусть
поверхности элементов пары деформируются
под действием нормальной силы и касаются
в малой окрестности точки А,
а относительное движение звеньев
определяется заданием скорости скольжения
![]() и вектора относительной угловой скорости
и вектора относительной угловой скорости
![]() .
Направим ось z по общей
нормали к поверхностям в точке А,
а ось х
– по линии действия вектора
.
Направим ось z по общей
нормали к поверхностям в точке А,
а ось х
– по линии действия вектора
![]() . Тогда все компоненты
реакции выражаются через величину
нормальной силы N.
Используя соотношения (5.1), находим
. Тогда все компоненты
реакции выражаются через величину
нормальной силы N.
Используя соотношения (5.1), находим
 (5.7)
(5.7)
где
![]() – компонента вектора
угловой скорости, лежащая в плоскости
хАy,
а х
и y
– ее проекции на оси х
и y. Формулы (5.7) выражают
пять компонент реакций через шестую
компоненту.
– компонента вектора
угловой скорости, лежащая в плоскости
хАy,
а х
и y
– ее проекции на оси х
и y. Формулы (5.7) выражают
пять компонент реакций через шестую
компоненту.
Получение аналогичных соотношений для пар с меньшей подвижностью является сложной задачей, поскольку в общем случае закон распределения нормальных реакций по поверхности или по линии соприкосновения остается неизвестным. Обычно дополнительные условия выбираются с учетом конструктивных особенностей элементов кинематической пары, позволяющих делать некоторые априорные предположения о характере распределения нормальных реакций.
Рассмотрим некоторые примеры формирования таких условий, т.е., по существу, примеры построения расчетных динамических моделей кинематических пар с трением.