

Экзамен / тмм - экзамен(и задачи) / ТММ Экзамен! / Лекции / шпоры динамика / 9
.doc Силовой
расчет червячной передачи
(рис. 5.13). Червячная передача содержит
одну высшую пятиподвижную кинематическую
пару, динамическая модель которой
представляется уравнениями (5.16), и две
вращательные пары. Пренебрежем трением
во вращательных парах, поскольку оно
обычно оказывается значительно менее
существенным, чем трение в червячном
зацеплении. Уравнения кинетостатики
для червячного колеса и червяка
оказываются независимыми. Сначала
составим уравнения кинетостатики для
червячного колеса. Положим, что оси
координат 02xyz
являются главными центральными осями
инерции колеса. Используем соотношения
(5.16). Обозначим: r2
– начальный радиус червячного колеса,
J20
– момент инерции колеса относительно
оси 02z
(точка 02z
совпадает с центром масс колеса).
Проецируя силы, действующие на колесо,
на оси координат 02xyz
и составляя уравнения моментов
относительно этих осей, получаем систему
шести уравнений с шестью неизвестными
(NAx, Nay,
NCx, NCy,
N2z,
N12):
Силовой
расчет червячной передачи
(рис. 5.13). Червячная передача содержит
одну высшую пятиподвижную кинематическую
пару, динамическая модель которой
представляется уравнениями (5.16), и две
вращательные пары. Пренебрежем трением
во вращательных парах, поскольку оно
обычно оказывается значительно менее
существенным, чем трение в червячном
зацеплении. Уравнения кинетостатики
для червячного колеса и червяка
оказываются независимыми. Сначала
составим уравнения кинетостатики для
червячного колеса. Положим, что оси
координат 02xyz
являются главными центральными осями
инерции колеса. Используем соотношения
(5.16). Обозначим: r2
– начальный радиус червячного колеса,
J20
– момент инерции колеса относительно
оси 02z
(точка 02z
совпадает с центром масс колеса).
Проецируя силы, действующие на колесо,
на оси координат 02xyz
и составляя уравнения моментов
относительно этих осей, получаем систему
шести уравнений с шестью неизвестными
(NAx, Nay,
NCx, NCy,
N2z,
N12):
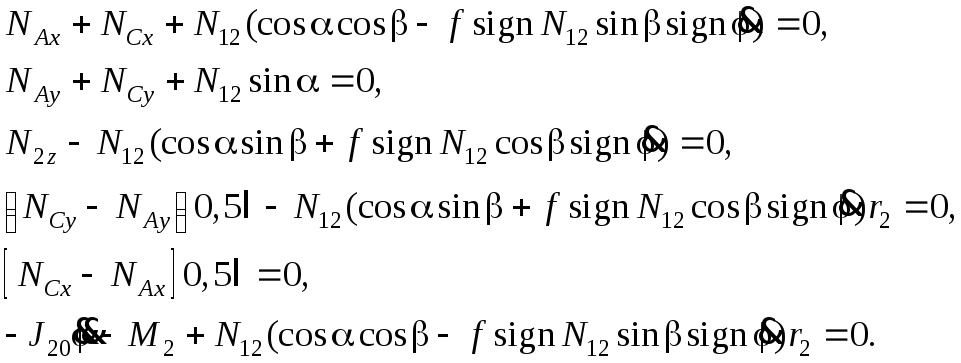 (5.36)
(5.36)
Пусть
направление угловой скорости
![]() совпадает с показанным на рисунке:
совпадает с показанным на рисунке:
![]() > 0 (sign
> 0 (sign![]() = +1). Из последнего уравнения (5.36) определим
N12:
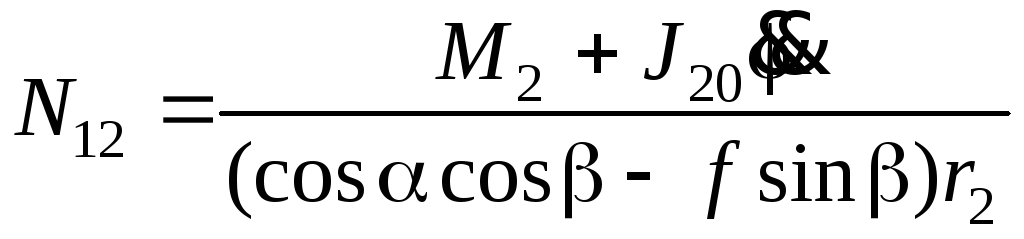
= +1). Из последнего уравнения (5.36) определим
N12:
 .
(5.37)
.
(5.37)
Найдем значения N12 при различных соотношениях между α, β и f и сведем их в табл. 5.5.
Таблица 5.5
|
|
cosαcosβ > fsinβ |
cosαcosβ < fsinβ |
|
M2 + J20 > 0 |
Тяговой режим |
Нет решения. Режим самоторможения |
|
M2 + J20 < 0 |
|
Режим оттормажвания. |
 >0
>0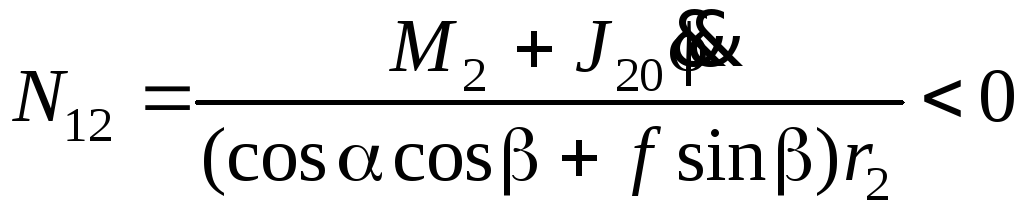 Инверсный
тяговый режим
Инверсный
тяговый режим >0;
>0; .
.
Определив N12, можно найти и остальные реакции из уравнений (5.36).
Аналогично составляются и решаются уравнения кинетостатики для червяка: из них определяются реакции опор и движущий момент Q.