

Лабораторная работа № 2
ГЕНЕРИРОВАНИЕ ПОЛУБЕСКОНЕЧНЫХ
ПСЕВДОСЛУЧАЙНЫХ ПРОЦЕССОВ
Цель работы: построение нерекурсивных и рекурсивных генераторов полубесконечных процессов с заданными корреляционными свойствами.
Интегральное уравнение генератора полубесконечного процесса
Базовая
модель шума в радиоэлектронике и других
приложениях: шум – стационарный процесс
![]() ,
,
![]() - функция корреляции. Процесс считается
полубесконечным, если его протяженность
- функция корреляции. Процесс считается
полубесконечным, если его протяженность
![]() ,
,
![]() - интервал корреляции. На практике
генерируется одна достаточно протяженная
реализация шума. Задача генерирования
шума формулируется как задача окрашивания
белого шума: надо синтезировать линейный
фильтр, преобразующий белый шум
- интервал корреляции. На практике
генерируется одна достаточно протяженная
реализация шума. Задача генерирования
шума формулируется как задача окрашивания
белого шума: надо синтезировать линейный
фильтр, преобразующий белый шум
![]() в окрашенный – имеющий заданную функцию
корреляции
.
в окрашенный – имеющий заданную функцию
корреляции
.
Линейный фильтр описывается сверткой: сигнал на его выходе [1]
![]() ,
(1)
,
(1)
![]() -
сигнал на входе,
-
сигнал на входе,
![]() -
весовая функция фильтра. Если
-
весовая функция фильтра. Если
![]() ,
то среднее значение
,
то среднее значение
![]() ,
а функция корреляции сигнала (1)
,
а функция корреляции сигнала (1)
![]()
![]() .
(2)
.
(2)
Функция (2) записана в самом общем виде - как функция корреляции нестационарного процесса, например, для выходного сигнала в неустановившемся режиме.
Если
- белый шум (с функцией корреляции
![]() ),
то интеграл
),
то интеграл
![]()
![]()
по фильтрующему
свойству
![]() -
функции записывается
-
функции записывается
![]() .
.
В
установившемся режиме
![]() - стационарный процесс, его функция
корреляции – функция разности аргументов,
то есть
- стационарный процесс, его функция
корреляции – функция разности аргументов,
то есть
![]() .
.
Обычно
последнее соотношение записывают с
дисперсией
![]() :
:
![]() ,
(3)
,
(3)
так как безразлично, как обозначать переменные интегрирования.
Если
функция
![]() задана, то соотношение (3) становится
интегральным уравнением относительно
неизвестной весовой функции
.
Решить уравнение (3) – значит решить
задачу синтеза линейного фильтра,
окрашивающего белый шум. Другими словами,
интегральное уравнение (3) можно назвать
уравнением генератора стационарного
гауссова процесса с заданной функцией
корреляции.
задана, то соотношение (3) становится
интегральным уравнением относительно
неизвестной весовой функции
.
Решить уравнение (3) – значит решить
задачу синтеза линейного фильтра,
окрашивающего белый шум. Другими словами,
интегральное уравнение (3) можно назвать
уравнением генератора стационарного
гауссова процесса с заданной функцией
корреляции.
Общее решение уравнения (3) приведено в [2]:
![]() ,
(4)
,
(4)
![]() - число сочетаний
из
- число сочетаний
из
![]() по
по
![]() ,
повторные функции
,
повторные функции
![]() ,
,
![]()
![]() ,
,
 .
.
Для типовых функций корреляции [2]
1)
![]() ,
,
2)
![]() ,
,
3)
![]() ,
,
4)
![]() ,
,
5)
![]() ,
,
![]()
решения уравнения
1)
![]() ,
,
2)
![]() ,
,
3)
![]() ,
,
4)
![]() ,
,
5)
![]() .
.
На
рис. 1 приведен пример функций
и
для четвертого варианта при
![]() ,
,
![]() .
.

Рис. 1. Функция корреляции и весовая функция
2. Интервал дискретизации
Реализация
генератора на ЦВМ требует перехода от
непрерывных функций (5) и (6) к дискретным
– векторам
![]() и
и
![]() .
На входе и выходе генератора также
дискретные сигналы – последовательности
(векторы) случайных чисел
.
На входе и выходе генератора также
дискретные сигналы – последовательности
(векторы) случайных чисел
![]() и
и
![]() .
Значения вектора
формируются по правилу дискретной
свертки [1] – дискретного аналога свертки
(1)
.
Значения вектора
формируются по правилу дискретной
свертки [1] – дискретного аналога свертки
(1)
![]() ,
,
![]() ,
(7)
,
(7)
- длина формируемого вектора.
При
построении любой дискретной системы
принципиальным является назначение
интервала дискретизации
![]() ,
с которым берутся отсчеты непрерывных
сигналов и функций. По теореме Котельникова
интервал дискретизации
,
с которым берутся отсчеты непрерывных
сигналов и функций. По теореме Котельникова
интервал дискретизации
![]() ,
(8)
,
(8)
где
![]() -
верхняя граничная частота полосы частот
системы. Знак равенства в (8) справедлив
для сигналов бесконечной длительности.
Так как реальный вектор
,
хотя и протяженной, но конечной
длительности, значение
может быть уменьшено. Реальный смысл
выбора интервала дискретизации понятен:
он должен быть достаточно большим, чтобы
количество отсчетов было минимальным,
и достаточно малым, чтобы хорошо
отслеживались особенности дискретизируемых
сигналов и функций. Базовым значением
можно назначить
-
верхняя граничная частота полосы частот
системы. Знак равенства в (8) справедлив
для сигналов бесконечной длительности.
Так как реальный вектор
,
хотя и протяженной, но конечной
длительности, значение
может быть уменьшено. Реальный смысл
выбора интервала дискретизации понятен:
он должен быть достаточно большим, чтобы
количество отсчетов было минимальным,
и достаточно малым, чтобы хорошо
отслеживались особенности дискретизируемых
сигналов и функций. Базовым значением
можно назначить
![]() и далее его уточнить экспериментально.
и далее его уточнить экспериментально.
Спектр
мощности
![]() стационарного
процесса с функцией корреляции
стационарного
процесса с функцией корреляции
![]() находится ее Фурье – преобразованием.
Функция корреляции симметрична, поэтому
Фурье – преобразование записывается
как косинус – преобразование:
находится ее Фурье – преобразованием.
Функция корреляции симметрична, поэтому
Фурье – преобразование записывается
как косинус – преобразование:
 .
.
Для функций корреляции (5) спектры мощности равны соответственно
1)
 ,
,
2)
 ,
,
3)
 ,
,
4)
 ,
,
5)

 .
.
Мощность
случайного процесса
 при
при
![]() .
Верхняя граничная частота
.
Верхняя граничная частота
![]() находится из условия
находится из условия
![]() ,
,
![]() ,
например, как
,
при которой
,
например, как
,
при которой
![]() .
.
Пример
1. Расчет спектра мощности процесса с
функцией корреляции
![]() и интервала дискретизации по теореме
Котельникова. Спектр мощности
и интервала дискретизации по теореме
Котельникова. Спектр мощности
 .
.
Функции
![]() ,
показаны на рис. 2 для значений параметра
,
показаны на рис. 2 для значений параметра
![]() и
и
![]() .
Расчет вероятности
.
Расчет вероятности
![]() может выполняться в SIGNAL
PROCESSING
функцией TRAPZ(f,G),
в SYMBOLIC
MATH
- функцией INT(G,0,F)
[3]. Например, значение
может выполняться в SIGNAL
PROCESSING
функцией TRAPZ(f,G),
в SYMBOLIC
MATH
- функцией INT(G,0,F)
[3]. Например, значение
![]() достигается при
достигается при
![]() для
для
![]() и при
и при
![]() для
для
![]() .
Следовательно, интервал дискретизации
можно назначить равным
.
Следовательно, интервал дискретизации
можно назначить равным
![]() в первом случае и
в первом случае и
![]() во втором.
во втором.
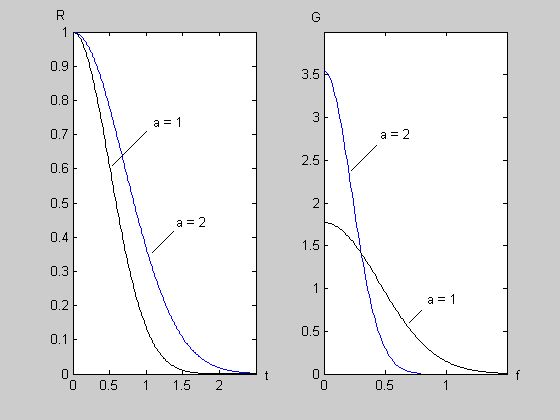
Рис. 2. Функция корреляции, спектр мощности
Можно также воспользоваться функцией CUMSUM (накапливающееся суммирование) в SIGNAL PROCESSING (рис. 3):
clear
T=1.5
del=0.01
f=0:del:T;
a=1
g=2*sqrt(pi)/a*exp(-pi^2/a^2*f.^2)
a1=2
g1=2*sqrt(pi)/a1*exp(-pi^2/a1^2*f.^2)
p=cumsum(g)*del; % интегрирование по формуле прямоугольников
p1=cumsum(g1)*del;
p=p/max(p); % нормировка к единице
p1=p1/max(p1);
plot(f,p,’r’,f,p1)
Нормировка необходима потому, что интегрирование по формуле прямоугольников выполняется с погрешностями. Верхняя граничная частота назначается приблизительно по признаку достижения мощностью значения единица. Конечно, визуальный метод менее точен.

Рис. 3. Зависимость мощности от полосы частот