

Задание № 3, вариант 1
МЕХАНИЗМ КАЧАНИЯ ПЛЕЧА РОБОТА С ЗУБЧАТОЙ ПЕРЕДАЧЕЙ
1. Задание на индивидуальную работу
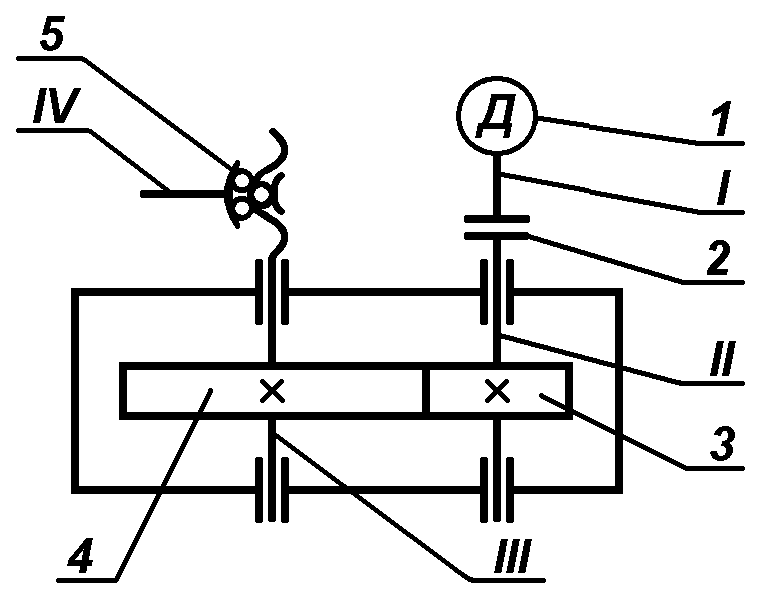
Рис.1. Схема кинематическая
Схема кинематическая:1 – электродвигатель; 2 – соединительная муфта; 3-4 – зубчатая передача; 5 – шариковинтовая передача; I-II – валы; III – вал-винт; IV – палец для соеди-нения с рукой робота.
Исходные данные
Мощность, снимаемая с выходного вала III, РIII=3 Вт.
Скорость вращения вала III, nIII =350 об/мин.
Тип зубчатой передачи 3,4: прямозубая.
Срок службы L=12000 часов
Производство единичное
2. Описание работы механизма
Вращение от электродвигателя 1 передается через соединительную муфту 2 на входной вал II одноступенчатого цилиндрического прямозубого редуктора. Входной вал редуктора II выполнен заодно с шестерней 3. Цилиндрическая прямозубая передача преобразует вращательное движение шестерни 3 во вращательное движение колеса 4 с уменьшением частоты вращения и увеличением крутящего момента на выходном валу редуктора III. Концевой участок выходного вала выполнен в виде винта, являющегося элементом шариковинтовой передачи 5, которая преобразует вращательное движение вала III в поступательное движение пальца IV, выполненного заодно с гайкой шариковинтовой передачи.
Для механизма качания плеча робота характерны частые пуски, реверсы и остановки
3. Предварительный выбор двигателя
По заданной мощности РIII=3 Вт, снимаемой с выходного вала редуктора, с учетом КПД механизма ηp определяем требуемую мощность двигателя Рmp. Так как механизм еще не спроектирован и не известен его действительный КПД, задаемся его предварительным значением ηp=0,7 ([2], стр.208). При расчете мощности двигателя необходимо учесть режим работы механизма в составе промышленного робота, для которого характерны частые пуски, реверсы, остановки. Тогда требуемая мощность двигателя будет равна:
![]()
По найденному значению Pmp по условию P∂в > Pmp.из каталога подбираем подходящий тип двигателя: универсальных коллекторный электродвигатель УМТ -12, у которого номинальная мощность P∂в=10 Вт, частота вращения составляет nдв=2000 об/мин.
4. Расчет редуктора
4.1. Кинематический расчет
Определим передаточное число редуктора, которое равно отношению частоты вращения входного вала к частоте вращения выходного вала:
![]()
Примем фактическое
значение передаточного числа редуктора
![]() =5,7
=5,7
Вычисляем частоты и угловые скорости вращения валов:
![]() об/мин
об/мин
![]() об/мин
об/мин
Отклонение от заданной частоты вращения составляет:
![]() ,
что меньше допустимых 1,5%
,
что меньше допустимых 1,5%
![]() рад/с
рад/с
![]() рад/с
рад/с
4.2. Расчет размеров цилиндрической прямозубой передачи
При расчете геометрических размеров цилиндрической прямозубой передачи предварительно выбираем следующие параметры: модуль m=1 мм и число зубьев шестерни z5=20.
Тогда число зубьев колеса определяется по выражению:
![]()
Производим расчет основных параметров цилиндрической прямозубой передачи:
Делительный диаметр шестерни:
![]() мм
мм
Делительный диаметр шестерни:
![]() мм
мм
Межосевое расстояние передачи:
![]() мм
мм
Диаметры окружности вершин зубьев шестерни и колеса:
![]() мм
мм
![]() мм
мм
Диаметры окружности впадин зубьев шестерни и колеса:
![]() мм
мм
![]() мм,
мм,
где с*
- коэффициент радиального зазора; для
m![]() 1
мм с*=0,25
([2], стр.176).
1
мм с*=0,25
([2], стр.176).
Шаг зубьев:
![]() мм
мм
Длина зуба и ширина венца колеса ([2], стр.162):
![]() мм
мм
Примем
![]() мм.
мм.
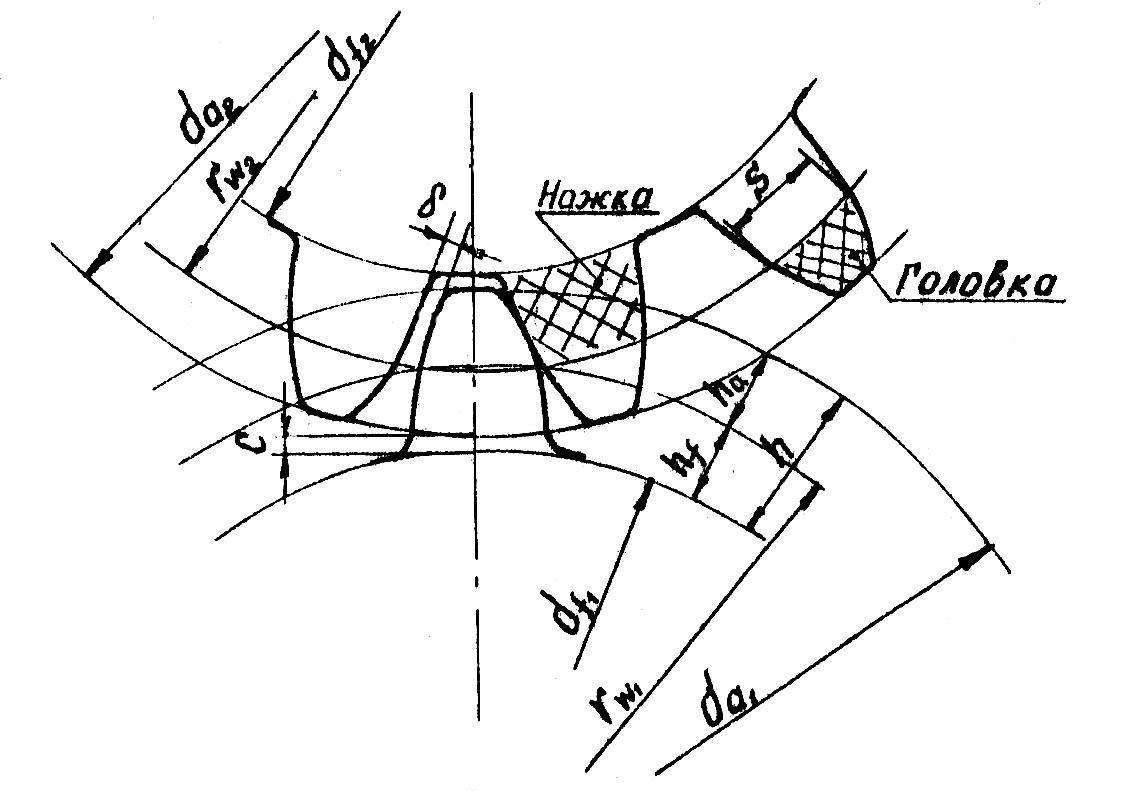
Рис.2. Схема зубчатой передачи