

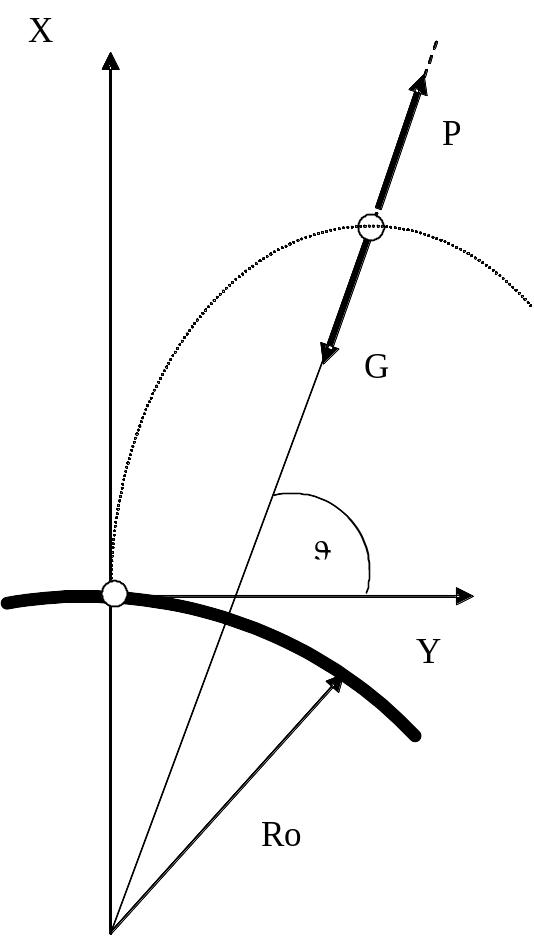
15. Выведение на орбиту
Допущения: – аэродинамические силы отсутствуют;
– гравитационное поле – центральное;
– Земля не вращается.
|
Модель движения
, ,
|
 .,
.,
где R0 – радиус сферической Земли;
μ – гравитационная постоянная;
m – масса топлива;
m0 – масса сухого ЛА;
P – сила тяги двигателя;
J – удельный импульс;
β – секундный расход топлива;
βm – максимально возможный расход топлива;
h – высота над поверхностью сферической Земли.
g0 – ускорение силы тяжести на поверхности Земли
В конечный момент времени КА должен быть выведен на круговую орбиту заданного радиуса R* при минимальном расходе топлива.
Найти программу управления углом тангажа, используя необходимые условия оптимального управления.
16. Выведение на орбиту
Допущения: – аэродинамические силы отсутствуют;
– гравитационное поле – центральное;
– Земля не вращается.
|
Модель движения
, , ; , .,
|
где R0 – радиус сферической Земли;
μ – гравитационная постоянная;
m – масса топлива;
m0 – масса сухого ЛА;
P – сила тяги двигателя;
J – удельный импульс;
β – секундный расход топлива;
βm – максимально возможный расход топлива;
h – высота над поверхностью сферической Земли.
g0 – ускорение силы тяжести на поверхности
В конечный момент времени КА должен быть выведен на круговую орбиту заданного радиуса R* при минимальном расходе топлива.
Программа управления углом тангажа задана в параметрической форме
.
Следует найти неизвестные параметры , , сведением исходной задачи программирования управления к задаче нелинейного программирования.
17. Перевод ка в заданное положение на орбите
Космический аппарат орбитальной группировки необходимо перевести в новое место орбитальной структуры. Перевод осуществляется в плоскости опорной круговой орбиты импульсами тяги, прикладываемыми по касательной к орбите. Можно считать, что переходная орбита остается близкой к круговой, а состояние КА можно характеризовать двумя координатами:
x1 = Δφ – отклонение аргумента широты КА от требуемого при прохождении характерной точки орбиты, например – восходящего узла;
x2 – скорость дрейфа, численно равная изменению аргумента широты за один драконический период (т.е. между двумя проходами восходящего узла) опорной орбиты.
При импульсной коррекции орбиты математическую модель можно представить в виде
![]()
![]() ,
,
,
,
где N – количество
коррекций;
![]() – интервал времени (измеряется в
оборотах) между коррекциями; uk
– величина k-го
импульса скорости дрейфа; μk
– гауссовская центрированная случайная
величина с дисперсией
– интервал времени (измеряется в
оборотах) между коррекциями; uk
– величина k-го
импульса скорости дрейфа; μk
– гауссовская центрированная случайная
величина с дисперсией
![]() .
Статистические характеристики переменных
начального состояния заданы.
.
Статистические характеристики переменных
начального состояния заданы.
Цель управления – выполнить терминальные требования
![]() ,
,
![]()
при минимальных затратах топлива.
Критерий оптимальности и ограничения аппроксимируем квадратичными функционалами3.
Найти управление
![]() ,
которое обеспечивает минимум энергетических
затрат
,
которое обеспечивает минимум энергетических
затрат
 при условии
при условии
![]() ,
,
где
![]() ;
;
 ,
,
 ,
,
![]() –
константа, выбираемая так, чтобы
терминальные требования выполнялись
бы с достаточной вероятностью.
–
константа, выбираемая так, чтобы
терминальные требования выполнялись
бы с достаточной вероятностью.
Для решения задачи ввести критерий
Лагранжа
![]() .
.
Исследовать зависимости
![]() и
и
![]() при различных N.
при различных N.
Длительности пассивных участков
![]() могут быть произвольными положительными
(заданы).
могут быть произвольными положительными
(заданы).