

6. Контрольні питання
1. Опишіть призначення програмованих мікроконтролерів.
2. Назвіть основні особливості використання мікроконтролерів порівняно із жорсткою логікою.
3. Дайте характеристику мікропроцесорного комплекту КР580.
4. Опишіть призначення функціональних блоків програмованого контролера «Електроніка МС2721».
5. Дайте характеристику системи команд контролера «Електроніка МС2721».
6. Опишіть процес симуляції роботи програм мікроконтролера.
7. Поясніть основні принципи створення програми в редакторі середовища .
8. Опишіть процедуру програмування мікроконтролера, вмонтованого в схему.
СПИСОК ЛІТЕРАТУРИ
Смирнитский Б.В. Автоматизированный электропривод типовых промышленных механизмов. - Харьков: ХГПУ, 1998.-380 с.
Справочник по автоматизированному электроприводу. Под ред. Елисеева В.А., Шинянского А.В.-М.: Энергоатомиздат, 1983.
Есаков В.П. Электрооборудование и электропривод промышленных установок.-К.: Вища школа, 1981.-248 с.
Ключев В.И., Терехов В.М. Электропривод и автоматизация общепромышленных механизмов.- М.: Энергия, 1980.
Соколов М.М. Автоматизированный электропривод общепромышленных механизмов, -М.: Энергия, 1976.
Додаток а
Розрахунок пускових та реґулювальних резисторів
у колах ротора асинхронних двигунів
Пуско-гальмівні та реґулювальні резистори в кранових електроприводах використовуються при параметричних методах реґулювання. Отримання механічних характеристик, що забезпечують задані показники реґулювання і потрібні пуско–гальмівні діаграми перехідних режимів, досягається при цьому введенням активних опорів у кола обмоток двигуна. Реактивні опори в кранових електроприводах не знайшли практичного використання. Під час розрахунку і вибору резисторів для головних кіл електроприводів одночасно повинні розв’зуватися дві задачі:
забезпечення необхідних механічних характеристик, що реалізують потрібний рівень реґулювання і прискорення;
забезпечення відповідності теплового режиму резисторів режимові роботи двигуна.
Опори в колі ротора асинхронних двигунів вмикаються за симетричними й несиметричними схемами. Симетричне ввімкнення застосовується в системах з панелями керування, а несиметричне – з кулачковими контролерами для зменшення кількості використовуваних при перемиканнях контактів. Під час розрахунку пускових опорів, увімкнених за симетричною схемою попередньо для заданого режиму роботи, будують діаграму пускового режиму (рис. А). Умови пуску характеризуються максимальним М2 та мінімальним М1 моментами перемикання, що визначаються за заданими прискореннями. Залежно від умов пуску вибирають одне з двох значень вказаних моментів: момент перемикання вибирають за необхідності зменшення прискорень; при форсованому пуску, навпаки, слід задаватися значеннями пускового моменту. Граничним випадком форсованого пуску є М2 = Мкр.
Рисунок. А - Пускова діаграма асинхронного двигуна
Розрахунок виконують в абсолютних або відносних одиницях.
У практичних розрахунках при виборі стандартного електрообладнання кількість ступенів переважно відома з умов роботи механізму або конструкції панелі керування. При знайденому опори пускових ступенів дорівнюють:
![]() , (А.1)
, (А.1)
де
![]() -
опір ступеня, що не вимикається;
-
опір ступеня, що не вимикається;
![]() ,
якщо ступінь, що не вимикається, відсутній.
,
якщо ступінь, що не вимикається, відсутній.
Загальний пусковий опір визначають при заданому моменті перемикань М1
![]() ; (А.2)
; (А.2)
при заданому максимальному моменті М2
![]() . (А.3)
. (А.3)
З достатньою для практичних розрахунків точністю з припущення прямолінійності пускових характеристик можна вважати, що
![]() . (А.4)
. (А.4)
Тоді при заданій кількості ступенів n і моменті М1 можна знайти
![]() , (А.5)
, (А.5)
а при форсованому пуску:
![]() , (А.6)
, (А.6)
де
![]() -
ковзання при номінальному моменті на
характеристиці з виведеними пусковими
опорами.
-
ковзання при номінальному моменті на
характеристиці з виведеними пусковими
опорами.
Якщо заданими є моменти М1 та М2, то кількість пускових ступенів опорів
![]() .
(А.7)
.
(А.7)
При знайдених опорах механічні
характеристики електропривода легко
можуть бути розраховані за допомогою
універсальних характеристик, наведених
на рис. А.2, побудованих у координатах
![]() з параметром
з параметром
![]() за уточненою формулою Клоса.
за уточненою формулою Клоса.
Приклад розрахунку резистора для кранового електропривода
1. Визначають розрахункову потужність привода за формулою:
![]() ,
,
де
![]() і
і
![]() згідно
з даними таблиці А.1, m
визначають із співвідношення
згідно
з даними таблиці А.1, m
визначають із співвідношення
![]() ,
,
тоді
![]()
![]()
Розрахунковий струм резистора:
![]()
Таблиця А.1 - Коефіцієнти і для різних систем електропривода
Схема керування |
|
|
Релейно – контакторна: |
|
|
з асинхронним двигуном з фазним ротором |
2,5 |
0,7 |
з асинхронним короткозамкненим двигуном |
2,3 |
0,8 |
з двигуном постійного струму |
2,8 |
0,65 |
Пуск двигунів від ТП постійного або змінного струму |
2 |
0,9 |
Номінальний опір:
![]()
Згідно з таблицею А.2 для вибраної панелі керування знаходять розбиття опорів ступенів резисторів і визначають опір кожного з резисторів (в одній фазі).
Теплова розрахункова потужність резисторів у трьох фазах:
 ,
,
де
![]() ,
,
 ,
,
де
![]() - за даними таблиці А.3;
- за даними таблиці А.3;
![]() - з рис. А.2;
- з рис. А.2;
а та
![]() - з таблиці А.3
- з таблиці А.3
Примітки.
1. У числівнику вказані відносні значення опорів, %; у знаменнику – струмове навантаження, %.
2. Маркування виводів ступенів показане на схемах [2,с ] і в каталогах на кранове електрообладнання.
Таблиця А.2 - Опори та струми ступенів резисторів для електроприводів змінного струму з панелями керування
Ступені |
Тип панелі |
||||||||
ТА, К |
ТСА,КС |
ТСД |
ТА, К |
ТСА,КС |
ТСД |
ТА, К |
ТСА,КС |
ТСД |
|
Струм ротора не > 60 А |
Струм ротора не > 160 А |
Струм ротора > 160 А |
|||||||
Р1-Р4 |
|
- |
|
|
|
|
|
|
|
Р4-Р7 |
|
- |
|
|
|
|
- |
- |
- |
Р7-Р10 |
|
- |
|
|
|
|
- |
- |
- |
Р10-Р13 |
|
- |
|
|
|
|
- |
- |
|
Р13-Р16 |
- |
- |
- |
|
|
|
- |
- |
|
Р4-Р10 |
- |
- |
- |
- |
- |
- |
|
|
|
Р10-Р16 |
- |
- |
- |
- |
- |
- |
|
|
- |
Р1-Р7 |
- |
- |
- |
- |
- |
- |
|
|
|
Р7-Р13 |
- |
- |
- |
- |
- |
- |
|
|
|
Р16-Р19 |
- |
- |
- |
- |
|
- |
- |
|
- |
.
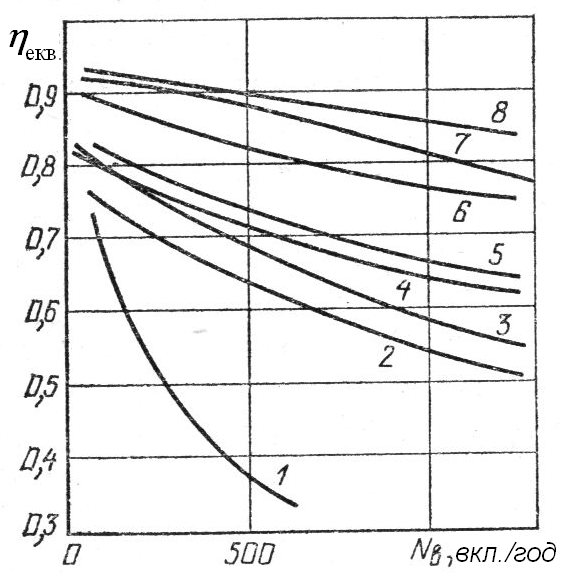
Рис.А.
2 - Графіки
![]() для різних електроприводів:
для різних електроприводів:
1 – двошвидкісний короткозамкнений двигун при 2р=4/24; 2 – параметричне реґулювання двигунів з фазним ротором і гальмуванням противмиканням; 3 – тришвидкісні короткозамкнені двигуни при 2р=4/8/24; 4 – параметричне реґулювання двигунів постійного струму, короткозамкнених двигунів з 2р=6 і двигунів з фазним ротором при динамічному гальмуванні; 5 – тришвидкісні короткозамкнені двигуни при 2р=6/12/24; 6 – з обмеженою зоною частотного керування двошвидкісних короткозамкнених двигунів; 7 – тиристорний привод постійного струму: 8 – частотно – керовані одношвидкісні короткозамкнені двигуни.
 ,
,
де
![]() та
та
![]() -
відносні значення опору навантаження,
%, які визначають за таблицею А.2.
-
відносні значення опору навантаження,
%, які визначають за таблицею А.2.
Відповідно до таблиці А.4 або А.5 вибирають нормалізовані блоки резисторів.
Таблиця А.3 - Значення для вибору різних систем електропривода
Система електропривода |
|
|
Підйом при
пересування в поворот при
для режимів |
Пересування в поворот при
режимів |
||||||
1М-3М |
4М |
5М |
6М |
3М |
4М |
5М |
6М |
|||
Асинхронний електропривод: |
|
|||||||||
Двошвидкісний при 2р=4/24 |
0,83 |
4 |
0,7 |
- |
- |
- |
- |
- |
- |
- |
Одношвидкісний при 2р=6 |
0,81 |
4 |
1,3 |
1 |
0,65 |
0,3 |
0,2 |
- |
- |
- |
З фазним ротором при гальмуванні противмиканням |
0,76 |
1,25 |
1,4 |
1,2 |
0,95 |
0,75 |
0,75 |
0,65 |
0,35 |
0,2 |
З фазним ротором при динамічному гальмуванні |
0,81 |
1,25 |
1,45 |
1,3 |
1,1 |
09 |
0,9 |
0,85 |
0,5 |
0,3 |
Двошвидкісний при 2р=4/6 з неповною зоною частотного керування |
0,9 |
1,25 |
1,4 |
1,15 |
1 |
0,7 |
0,55 |
0,2 |
- |
- |
Одношвидкісний у системі частотного керування |
0,94 |
1,25 |
1,45 |
1,3 |
1,15 |
1,05 |
1,15 |
1,1 |
0,85 |
0,7 |
Тиристорний електропривод постійного струму |
0,94 |
1,25 |
2 |
1,3 |
1,15 |
0,95 |
1,4 |
1 |
0,75 |
0,5 |
Електропривод постійного струму з параметричним реґулюванням |
0,81 |
1,25 |
2 |
1,25 |
1,1 |
0,8 |
1,25 |
0,85 |
0,5 |
0,3 |
Таблиця А.4 - Нормалізовані блоки резисторів типу БФ6
Номер за каталогом |
Струм тривалого режиму, А |
Загальний опір, Ом |
Опір ступенів, Ом |
Кількість вивідних затискачів |
|||||||
1-2 |
2-3 |
3-4 |
4-5 |
5-6 |
6-7 |
7-8 |
8-9 |
||||
ІРАК 434332.004-01 |
228 |
0,115 |
0,0215 |
0,017 |
0,017 |
0,0215 |
0,019 |
0,019 |
- |
- |
7 |
ІРАК 434332.004-02 |
204 |
0,142 |
0,026 |
0,0215 |
0,0215 |
0,026 |
0,0235 |
0,0235 |
- |
- |
7 |
ІРАК 434332.004-03 |
160 |
0,216 |
0,036 |
0,036 |
0,036 |
0,036 |
0,036 |
0,036 |
- |
- |
7 |
ІРАК 434332.004-04 |
128 |
0,37 |
0,0615 |
0,0615 |
0,0615 |
0,0615 |
0,0615 |
0,0615 |
- |
- |
7 |
ІРАК 434332.004-05 |
114 |
0,474 |
0,079 |
0,079 |
0,079 |
0,079 |
0,079 |
0,079 |
- |
- |
7 |
ІРАК 434332.004-06 |
102 |
0,58 |
0,096 |
0,096 |
0,096 |
0,096 |
0,096 |
0,096 |
- |
- |
7 |
ІРАК 434332.004-07 |
80 |
0,88 |
0,146 |
0,146 |
0,146 |
0,146 |
0,146 |
0,146 |
- |
- |
7 |
ІРАК 434332.004-08 |
64 |
1,5 |
0,25 |
0,25 |
0,25 |
0,25 |
0,25 |
0,25 |
- |
- |
7 |
ІРАК 434332.004-09 |
57 |
1,92 |
0,32 |
0,32 |
0,32 |
0,32 |
0,32 |
0,32 |
- |
- |
7 |
ІРАК 434332.004-10 |
51 |
2,4 |
0,4 |
0,4 |
0,4 |
0,4 |
0,4 |
0,4 |
- |
- |
7 |
ІРАК 434332.004-11 |
40 |
3,5 |
0,44 |
0,435 |
0,435 |
0,44 |
0,44 |
0,435 |
0,435 |
0,44 |
9 |
ІРАК 434332.004-12 |
36 |
4,8 |
0,6 |
0,596 |
0,596 |
0,6 |
0,6 |
0,596 |
0,596 |
0,6 |
9 |
Таблиця А.5 - Нормалізовані блоки резисторів типу БК12
Номер за каталогом |
Струм тривалого режиму, А |
Загальний опір, Ом |
Опір ступенів, Ом |
Кількість вивідних затискачів |
|||||
1-2, 2-3 |
3-4, 4-5 |
5-6, 6-7 |
7-8, 8-9 |
9-10 10-11 |
11-12 |
||||
ІРАК 434331.003-01 |
8,5 |
52,8 |
4,4 |
4,4 |
4,4 |
4,4 |
4,4 |
8,8 |
12 |
ІРАК 434331.003-02 |
21,2 |
8,4 |
0,7 |
0,7 |
0,7 |
0,7 |
0,7 |
1,4 |
12 |
ІРАК 434331.003-03 |
18,3 |
11,7 |
0,975 |
0,975 |
0,975 |
0,975 |
0,975 |
1,95 |
12 |
ІРАК 434331.003-04 |
14,5 |
17,4 |
1,45 |
1,45 |
1,45 |
1,45 |
1,45 |
2,9 |
12 |
ІРАК 434331.003-05 |
13 |
23,4 |
1,95 |
1,95 |
1,95 |
1,95 |
1,95 |
3,9 |
12 |
ІРАК 434331.003-06 |
2,8 |
33,6 |
2,8 |
2,8 |
2,8 |
2,8 |
2,8 |
5,6 |
12 |
Додаток Б
ЗРАЗОК ОФОРМЛЕННЯ ТИТУЛЬНОЇ СТОРІНКИ
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
КРЕМЕНЧУЦЬКИЙ ДЕРЖАВНИЙ ПОЛІТЕХНІЧНИЙ УНІВЕРСИТЕТ
ІМЕНІ МИХАЙЛА ОСТРОГРАДСЬКОГО
ІНСТИТУТ ЕЛЕКТРОМЕХАНІКИ, ЕНЕРГОЗБЕРЕЖЕННЯ І КОМП'ЮТЕРНИХ ТЕХНОЛОГІЙ
ЛАБОРАТОРНА РОБОТА №3
ДОСЛІДЖЕННЯ ТИПОВОЇ СХЕМИ КРАНОВОГО
ЕЛЕКТРОПРИВОДА З МАГНІТНИМ КОНТРОЛЕРОМ ТИПУ ТА